 如何减少车灯控制器MCU的数量来优化成本
如何减少车灯控制器MCU的数量来优化成本

本文转载自电子设计与芯片应用2025.4月第32卷。作者英飞凌 苏星&Fragiacomo Fabio。
在现代汽车中,众多电子控制单元(ECU)负责控制各种功能,如发动机管理、传动控制、制动系统和信息娱乐系统。每个 ECU 通常都配备有自己的 MCU,这增加了汽车电气架构的总体复杂性和成本。
车灯的情况也是如此,前后左右的车灯通常都有各自独立的 ECU。尤其在一些车灯包含成百上千个像素,或者灯是由多块分散的印刷电路板(PCB)组成时,以市场现存大量量产的 LED 驱动解决方案而言,每个灯板都需要使用一片 MCU 来作为控制的转发点来提升系统的可靠性,通讯速度以及电磁兼容(EMC)性能。
本文以 TLD7002-16ES 为例,提出了一种使用 UART OVER CAN 通讯接口来降本并且提升 EMC 性能的解决方案。
介绍
TLD7002-16ES 是一款 16 通道的汽车 LED 恒流源驱动芯片,具有全面的保护和诊断功能,支持高达 2M 通讯速率 UART OVRE CAN。它旨在控制最高达 76.5 mA 电流的 LED 作为线性电流 sink(LCS)。并联电源输出级实现更高的负载电流。每个独立的电源输出级都配置了存储在 OTP 中的 6 位电流设置值,并且可以设置 16 个独立的 PWM 配置。高速照明接口用于设备OTP 编程、配置、控制和诊断反馈。该芯片可以直接驱动多像素 LED,并且省去灯板上额外的 MCU。
此外,TLD7002-16ES 可以用作网关来控制其它的外置 LED 驱动,例如:线性恒流源(英飞凌 LITIX Basic+ 家族) 或者 DC/DC 转换器(LITIX Power)。在不增加额外 MCU 的基础上,可以沿用现有的方案,甚至减少 UART OVER CAN 线性 LED 驱动芯片数量,以支持更高的系统输出电流。通过以上方式可以有效优化系统成本。
基于 TLD7002-16ES 网关描述
TLD7002-16ES 是一款具有 HSLI 接口(CAN OVER UART)的智能 16 通道 LED 驱动器。
在英飞凌 TLD7002-16ES 的参考设计中,该芯片被用作网关,以控制多个外部 LED 驱动器,包括线性电流源(LITIX Basic+ 家族)或 DC/DC 转换器(LITIX Power 家族)。
以下将这些不在 TLD7002-16ES 上集成的 LED 驱 动器称为外部 LED 驱动器。这些外部驱动器负责驱动连接到外部 LED 驱动器上的 LED,而直接负载则是指由 TLD7002-16ES 输出直接驱动的 LED。
网关方法具有以下优势:
将 UART over CAN 接口带到现有的 LED 驱动器
从 LED 驱动器单元中删除微控制器
增加 TLD7002-16ES 的电流能力(通道数和最大电流)
通过在多个 LED 驱动器上分配热量来改善热管理
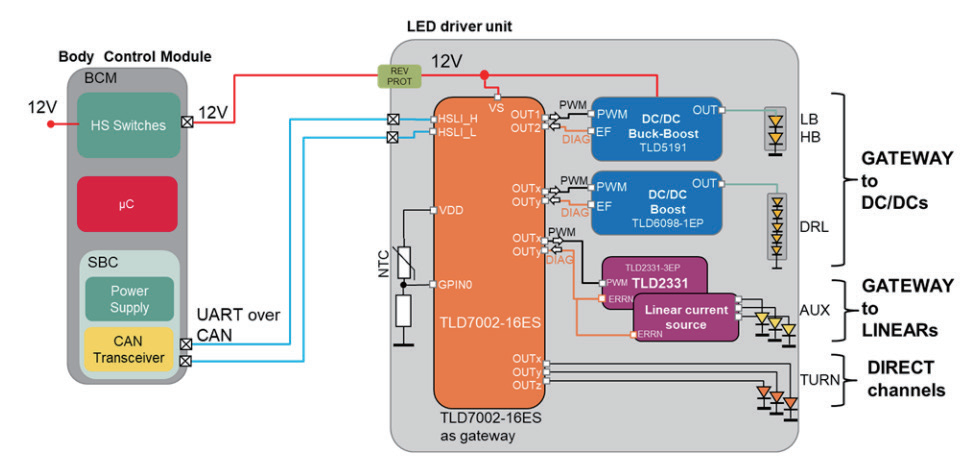
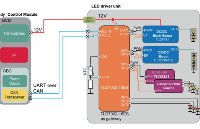
图1 TLD7002-16ES网关实现范例
使用 TLD7002-16ES 作为网关来控制外部 LED 驱动器,需要以下连接:
TLD7002-16ES 的 OUTn 通道提供 PWM 信号给外部 LED 驱动器
诊断基于外部 LED 驱动器的 Fault/ERR 引脚。Fault 引脚由TLD7002-16ES 的 OUTn 通道或相邻的OUTn+1 通道采样,具体取决于应用程序。
因此,一个“网关通道”可能占用 TLD7002-16ES 的两个输出:一个用于 PWM,一个用于诊断。
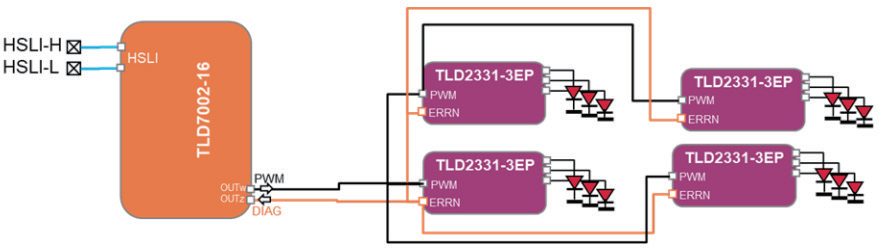
图2 外部的LED驱动和TLD7002-16ES的临近的2个通道连接
当多个线性电流源连接到单个 PWM 输出,并且 Fault 引脚收集到一个 TLD7002-16ES 输出时,TLD7002-16ES 的总输出通道使用量可以减少一半。
在某些情况下,单个 TLD7002-16ES 通道可以通过简单的变通方法同时服务 PWM 和诊断目的。
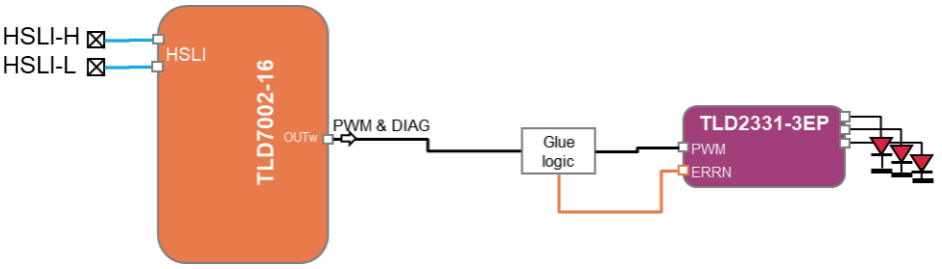
图3 PWM和诊断合并在TLD7002-16ES的单个输出
基于 TLD7702-16ES 的网关设计要点
使用TLD7002-16ES产生PWM
TLD7002-16ES 是一个低侧开漏电流沉,因此它生成的 PWM 是反向。这个反转的 PWM 信号可以通过软件轻松,但更优的方法是在TLD7002-16ES 拉电流时产生高电平PWM(即TLD7002-16ES 输出使能时)。保持反向的PWM 可能会在外部 LED 驱动器的输出端产生非期望的毛刺。
PWM 信号的反向可以通过使用一个简单的 BJT 晶 体管来实现,如图 4 所示。为了减少功率损耗,可以TLD7002-16ES 的 OUT12 通道的电流设置为最小值(5.6 mA)。此外,通过在基极上使用 10 kΩ 电阻,可以进一步减少功率损耗。但是,这可能会导致虚假的开路(OL)检测和 OUT12 通道的电流警告,应用软件必须忽略这些警告。或者,基极电阻 R78 可以使用较低的欧姆值(例如 330 Ω),这样可以允许输出保持在较高的电平,从而防止出现 CUR_WRN 或 OL 警告。
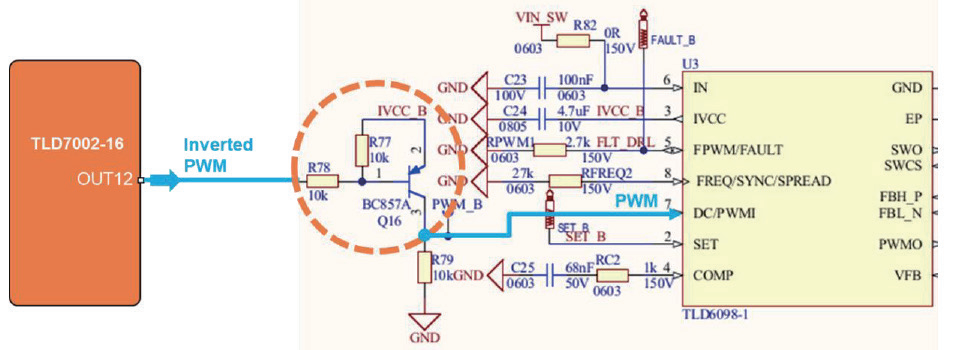
图4 TLD7002-16ES PWM信号整形
用一个TLD7002-16ES输出来覆盖外置LED驱动
器PWM和诊断
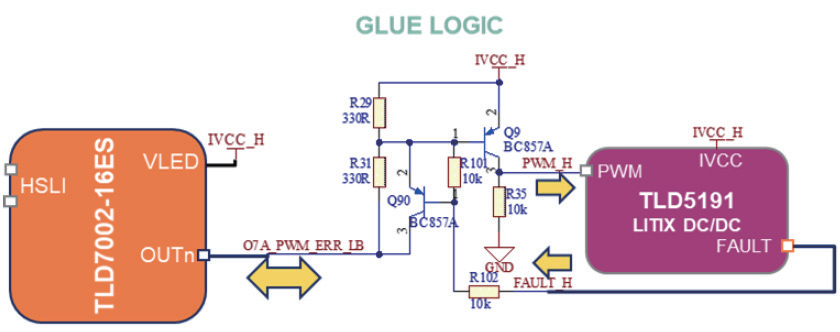
图5 粘合逻辑以提供PWM并监控故障引脚
使用单个 TLD7002-16ES 引脚和简单的粘合逻辑电路,可以执行 PWM 并检索外部 LED 驱动器的诊断信息。该电路有以下主要任务:
当 TLD7002-16ES OUTn 引脚流出电流时,生成反向的 PWM 信号到外部 LED 驱动器的 PWM 输入端。
如果外部 LED 驱动器出现故障,生成开路 OL 或 正向压降警告 VFWD_WRN 故障信号在 TLD7002-16ES OUTn 引脚上。
具体工作原理为:
Q9晶体管实际上为TLD5191ES 提供了一个清晰的(逻辑电平 HIGH/LOW)PWM 信号。如果TLD5191ES 检测到故障,则 FAULT_H 线将被拉低, 从而打开 Q90 晶体管,导致 OUTn 引脚的前向电压降低到 VBE(Q9) + 0.2 V(Q90 饱和电压)。如果 VFWD_ WRN阈值在一次性可编程(OTP)存储器中设置为1.25 V, 那么在外部 LED 驱动器故障期间降低的 VFWD 电压将在TLD7002-16ES OUTn引脚上产生VFWD_WRN信号。
需要注意的是,TLD7002-16ES 的 VLED 引脚和粘合逻辑的供电电压都是连接到 IVCC_H(5 V),该电压由 TLD5191ES 提供。这是必要的,因为 TLD7002-16ES 的诊断是基于差分电压读取 VLED-OUTn(或 VS-OUTn)来实现的。此外,外部LED 驱动器(TLD5191ES)的 PWM 信号必须在典型的逻辑电平上工作。或者,也可以使用 TLD7002-16ES的VDD引脚作为 PWM 粘合逻辑的供电电压,但需注意 VDD 引脚最多只能提供 10mA 的电流。
图 5 显示了粘合逻辑,具有以下要求:
当 OUTn 流出电流时,PWM > max PWM(H) 阈值
当 OUTn 不流出电流时,PWM < max PWM(L) 阈值
规则 1:在错误出现时,OUTn 应该产生 VFWD(OUTn-VLED)< VFWD_WRN 阈值。计算该要求时, 假设 OUTn 流出的电流为 IOUTn(max)
规则 2:在 ERRN 不流出电流时,OUTn 引脚不应产生 VFWD(OUTn-VLED)> VFWD_WRN 阈值。计算该要求时,假设 OUTn 流出的电流IOUTn(min)
可选规则:确保 OUTn > OL(0.5 V),以避免误触发 OL 检测。
诊断检测机制:
当 ERRN 流出电流(错误出现)时,R4 被旁路, 由 OUTn 读 取 VFWD=VBE (Q9) +VSAT(Q90), 在这种情况下,会将产生一个 VFWD_WRN(小 VFWD)。
当 ERRN 不流出电流( 错误不出现) 时,R4 的压降必须足够大,以防止 OUTn 检测 VFWD_WRN 或 SLS。然而,这个压降又不能过大,以免触发 OL 警告。
OTP设置
IOUTn = 5.6 mA 。这是 TLD7002-16 上可能的最小输出电流,用于减少功率损耗。
VFWD_WRN = 1.25 V 。在 R4 被旁路时,该值必须大于VBE(Q9)(低温)+ VSAT(Q90) =>,只有在这种情况下,错误才会被检测到。
网关控制LED驱动器的诊断小技巧
对于指令应用程序,例如 BCM,要检测外部 LED 驱动器通道中的故障,需要一个 TLD7002-16ES 输出采样外部驱动器的 Fault(或 ERR)引脚。
为了利用 TLD7002-16ES 的 诊断功能, 例如去抖动功能,当外部LED 驱动器的故障引脚活动时,触发TLD7002-16ES 的警告标志是一种便捷的方法。实现这一点的一种方法是使用外部驱动器的故障引脚来触发TLD7002-16ES 的 OL 警告或 VFWD_WRN 警告。这通常是通过外部粘合逻辑来实现的,如图 9 和图 10 所示。
OL 和 VFWD 警告检测机制在 TLD7002-16ES 数据手册中有详细解释。
网关通道上PWM顺序和相移的考虑
如果在两个不同的 TLD7002-16 通道上执行 PWM 和诊断(见图 6),那么正确地分配 PWM 和 DIAG TLD7002- 16 通道号码并了解其 PWM 约束是非常重要的。在网关通道上的 PWM诊断序列应该按照以下顺序进行:
TLD7002-16ES OUTn 通道将通过 PWM 引脚打开外部 LED 驱动器
TLD7002-16ES OUTn+1 通道将采样外部 LED 驱动器的 FAULT 引脚
在诊断 ADC 读取之前提供 PWM 是有利的,以确保外部 LED驱动器已被激活,从而使其故障引脚能够被 TLD7002-16正确采样。但是,通过适当的去抖动设置, 这个顺序要求可以被忽略。为了实现上述序列,建议将 TLD7002-16 OUTn 通道指定为 PWM 通道,将 OUTn+1 通道指定为诊断通道。
TLD7002-16ES 具有最小 PWM 开 启 时 间 约 束, 以 确 保 准 确 的 诊 断 读 取, 因 为 大 多 数 诊 断 标 志 在 TLD7002-16 上都是基于 VFWD 读取的。这些约束在此 简要概述,并在TLD7002-16数据手册 [5] 中有详细描述。
如果启用相移:tOUTnPW > tdiag_dly + tDIAG_ON
如 果 禁 用 相 移:tOUTnPW > tdiag_dly + (2+N)* tDIAG_ON
其中,N 等于禁用相移的前一个通道的数量。因此, 网关 DIAG 和 PWM 通道必须遵守适当的最小占空比。
例如,在图6中,网关函数在 OUT1和OUT2 上实现, 同时考虑以下情况,并将 OUT0 分配给不同的 LED 灯串:
在网关 PWM 通道之前的通道 OUT0 启用相移,这减少了接下来两个通道的 PWM 最小占空比约束
网关函数 PWM 和 DIAG 通道(OUT1,OUT2) 禁用相移,这减少了 PWM 和 DIAG 读取之间的时间,导致最小 PWM 占 空 比 等 于:
tOUTnPW > tdiag_dly + (2+1)* tDIAG_ON
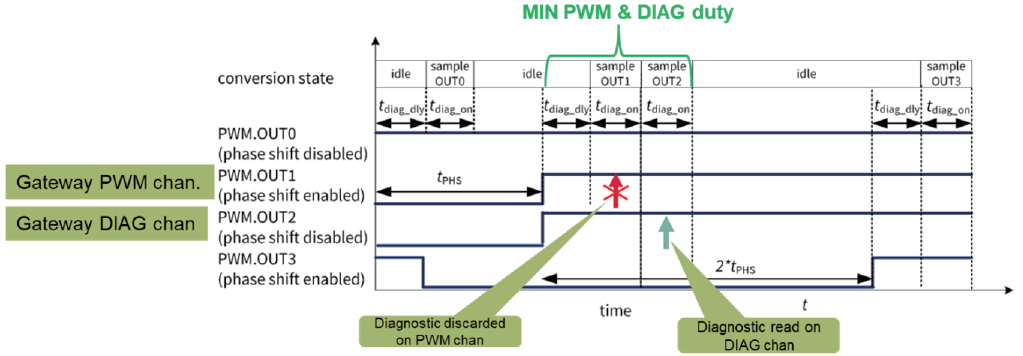
图6 TLD7002-16ES网关通道时序:PWM产生和诊断采样
驱动外部的 LITIX Basic + 线性芯片来实现扩流
TLD2331-3EP 作为一个 3 通道的高边恒流源,可以与 TLD7002-16ES 以如下的方式连接:
TLD2331-3EP的3条SET信号分别连接到TLD7002- 16ES 的 3 个输出端,这些输出端分别控制 3 个 IN_SET 通道。每个通道可以独立控制,实现高精度的电流调节和出色的动画效果。
TLD2331-3EP 芯片的 ERRN 引脚连接到下一个可用的 TLD7002-16ES 输出端,用于故障诊断。
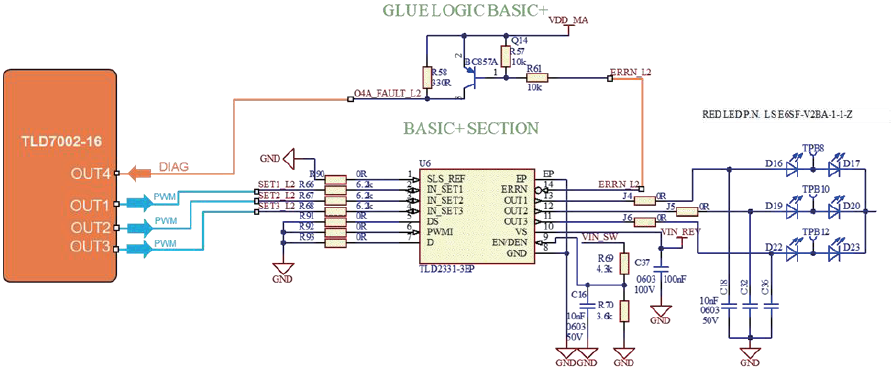
图7 驱动外部线性恒流源TLD2331-3EP
TLD1173-1ET 与 TLD7002-16ES 之间的连接如下:
一个 TLD7002-16ES 输出端同时连接到 TLD1173- 1ET 的 PWM 和 ERRN/DEN 引脚。PWM 和 ERRN/DEN 胶合逻辑电路在之前章节中详述过。
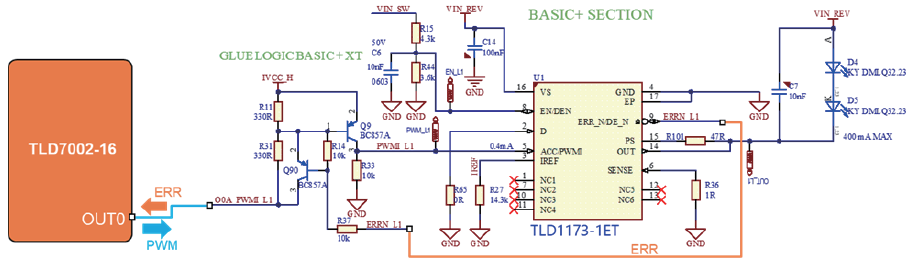
图8 驱动单通道低边线性恒流源芯片TLD1173-1ET
网关应用 OTP 配置范例
将诊断输出组设置为 VLED,并将 TLD7002-16 的VLED 引脚连接到 5 V(如果 PWM 和 ERR 粘合逻 辑连接到 5 V)
如果电路测试时模拟 TLD7002-16 的 OTP,或者将SLS 阈值锁定为“锁定”,否则 TLD7002-16 将选择默认的 SLS 阈值
如果 PWM 和 ERRN 粘合逻辑如图 5 所示,将VFWD_WRN 阈值设置为 1.25 V。这将在 ERRN 拉低时检测到 VFWD_WRN
将诊断去抖动配置设置为 4-6 个周期,以减少虚假错误检测
在每个网关函数的第一个通道之前启用相移,在同一个网关函数的通道之间禁用相移
这允许降低最小占空比(见 TLD7002-16ES 数据手册 [5] 的第 7.2 章) 。例如,对于图 5 中的电路,启用 OUT0 的相移,禁 用 OUT1,2,3,4 的相移 ,将 SLS 设置为 0,以便只关心 VFWD_WRN 标志 。
有 关 OTP 模 拟 和 编 程 的 更 多 详 细 信 息, 请 参 阅 TLD7002-16 OTP 编程 [3] 和OTP参数设置 [4] 应用笔记。
结论
TLD7002-16ES 智能网关芯片通过 UART OVER CAN 通讯口线,实现车灯 ECU 的 MCU-Less 架构。这 种设计减少了 40% 硬件复杂度及 25% 线束需求,推动了域集中式电气设计的革新。同时,它能更好满足软件定义汽车(SDV)对车灯系统的动态配置需求。单芯片集成方案替代传统分立设计,降低 30%BOM 成本。作为高性价比车灯控制平台,TLD7002-16ES 兼顾了功能安全、灵活扩展与可靠性升级,为智能车灯系统提供了坚实的硬件基础支撑。
-
英飞凌
+关注
关注
68文章
2443浏览量
142306 -
mcu
+关注
关注
147文章
18613浏览量
387167 -
控制器
+关注
关注
114文章
17646浏览量
190261 -
emc
+关注
关注
174文章
4323浏览量
190354 -
驱动芯片
+关注
关注
13文章
1550浏览量
57667
原文标题:[儒卓力为您带来英飞凌技术快讯】如何减少车灯控制器 MCU 的数量来优化成本
文章出处:【微信号:儒卓力,微信公众号:儒卓力】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
请问用算力强大的SOC来控制汽车是不是能够大幅减少MCU的使用数量?
利用先进的MCU技术实现电机高效率控制
使用低功耗微控制器实现的空调远程控制器
微控制器加速芯片整合 大幅扩展MCU可应用场域
【DIY】制作5V车灯控制器
微控制器MCU是什么
微控制器MCU的相关资料推荐
基于微控制器设计的行车灯控制器
采用可定制微控制器来优化算法的设计
采用基于Flash的低成本8位微控制器实现优化电子镇流器的设计


SPI协议优缺点 如何减少GPIO数量
如何减少车灯控制器 MCU 的数量来优化成本





 工商网监
工商网监
评论