 【CW32模块使用】SG90舵机
【CW32模块使用】SG90舵机

一、模块来源
模块实物展示:
资料链接:https://pan.baidu.com/s/1QsTIKnoQsOTCkeYLLTTjTA?pwd=8889
资料提取码:8889
二、规格参数
驱动电压:3V~7.2V
工作扭矩:1.6KG/CM
控制方式:PWM
转动角度:180度
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够控制舵机旋转的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
在购买时,需要分清楚你的舵机可以转180度,还是360度。360度的舵机是无法控制角度的,只可以控制旋转速度。
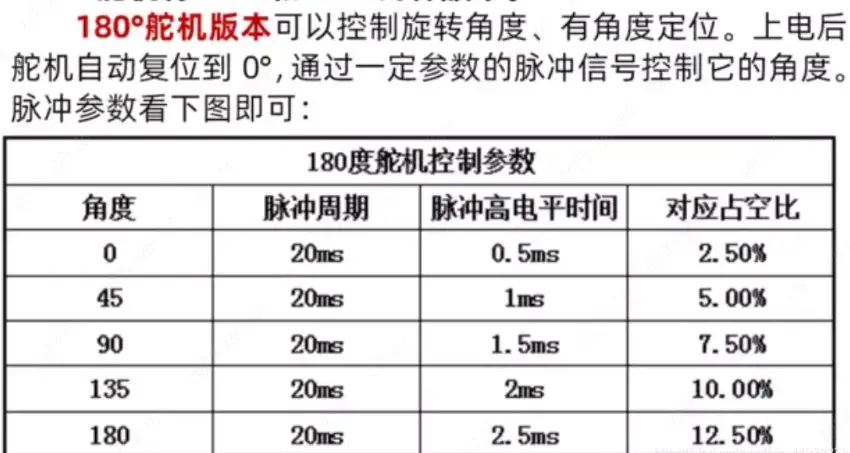
180度舵机
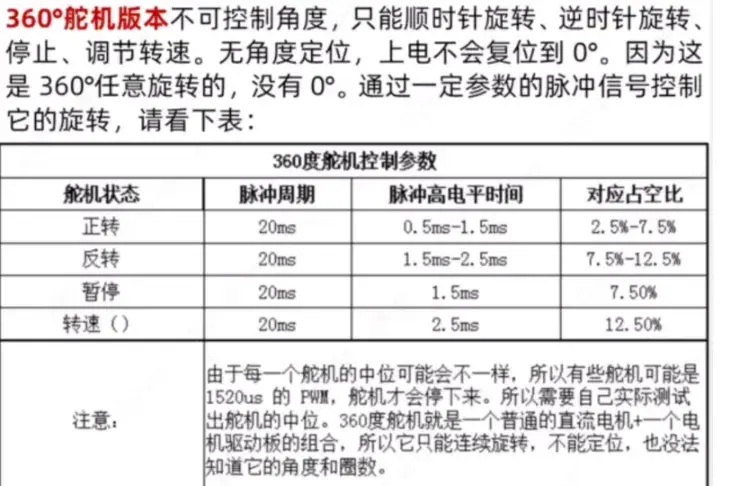
360度舵机
SG90的舵机转速不是很快,一般为0.22/60 度或0.18/60 度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。
3.2引脚选择
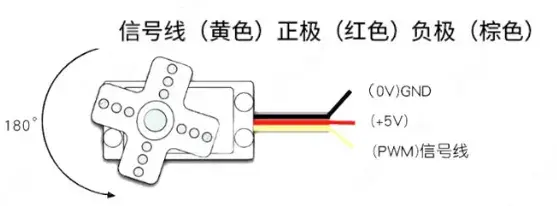

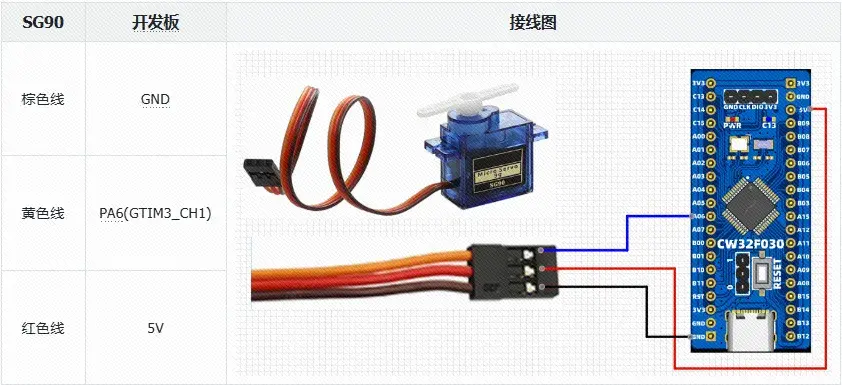
模块接线图
3.3移植至工程
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_sg90.c与bsp_sg90.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_sg90.c中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-25 LCKFB-LP first version */ #include "bsp_sg90.h" unsigned int Servo_Angle = 0;//舵机角度 /****************************************************************** * 函 数 名 称:SG90_Init * 函 数 说 明:PWM配置 * 函 数 形 参:pre定时器时钟预分频值 per周期 * 函 数 返 回:无 * 作 者:LC * 备 注: 配置占空比 范围 0 ~ (per-1) // t = 0.5ms——————-舵机会转动 0 ° // t = 1.0ms——————-舵机会转动 45° // t = 1.5ms——————-舵机会转动 90° // t = 2.0ms——————-舵机会转动 135° // t = 2.5ms——————-舵机会转动180° // 1.我该如何计算括号里的数,从而实现我想要的功能? // 此处以90度为例。 // 答:PWM周期为20ms,所以占空比就应该为1.5ms/20ms = 7.5%, // 所以 TIMx 捕获比较 1 寄存器值就为period-period*7.5% = 84-84*7.5%=77.7 ******************************************************************/ void SG90_Init(void) { // 启用 GPIO 和定时器时钟 RCC_SIG_GPIO_ENABLE(); // 启用 GPIO 时钟 RCC_SIG_TIMER_ENABLE(); // 启用定时器时钟 // 初始化 GPIO GPIO_InitTypeDef GPIO_InitStruct; // GPIO 初始化结构体 GPIO_InitStruct.Pins = GPIO_SIG; // GPIO 引脚 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 高速 GPIO_AF_SIG_ENABLE(); // 启用 GPIO 复用功能 GPIO_Init(PORT_SIG, &GPIO_InitStruct); // 初始化 GPIO // 初始化定时器 (GTIM3) GTIM_InitTypeDef GTIM_InitStruct; // 定时器初始化结构体 GTIM_InitStruct.Mode = GTIM_MODE_TIME; // 定时器模式 GTIM_InitStruct.OneShotMode = GTIM_COUNT_CONTINUE; // 连续计数模式 GTIM_InitStruct.Prescaler = GTIM_PRESCALER_DIV64; // 预分频器 (DCLK = PCLK / 64 = 64 MHz / 64 = 1 MHz) GTIM_InitStruct.ReloadValue = 20000 - 1; // 重装载值 (20 ms 周期) GTIM_InitStruct.ToggleOutState = ENABLE; // 输出翻转功能 GTIM_TimeBaseInit(BSP_SIG_TIMER, >IM_InitStruct); // 初始化定时器 GTIM_OCInit(BSP_SIG_TIMER, BSP_PWM_CHANNEL, GTIM_OC_OUTPUT_PWM_LOW); // 配置输出比较通道为低电平有效的 PWM 模式 GTIM_Cmd(BSP_SIG_TIMER, ENABLE); // 启用定时器 } /****************************************************************** * 函 数 名 称:Set_Servo_Angle * 函 数 说 明:设置角度 * 函 数 形 参:angle=要设置的角度,范围0-180 * 函 数 返 回:无 * 作 者:LC * 备 注:无 ******************************************************************/ void Set_Servo_Angle(unsigned int angle) { if(angle > 180) { angle = 180; // 限制角度在0到180度之间 } // 计算PWM占空比 // 注意:这里的20000是基于GTIM_Period设置为20000的 // 0.5ms对应的计数 = (0.5 / 20) * 20000 // 2.5ms对应的计数 = (2.5 / 20) * 20000 // 因此,角度从0到180度时,占空比应该从0.5ms到2.5ms线性变化 unsigned int ServoAngle = (unsigned int)((0.5 + (angle / 180.0) * 2.0) / 20.0 * 20000); GTIM_SetCompare1(BSP_SIG_TIMER, ServoAngle); } /****************************************************************** * 函 数 名 称:读取当前角度 * 函 数 说 明:Get_Servo_Angle * 函 数 形 参:无 * 函 数 返 回:当前角度 * 作 者:LC * 备 注:使用前必须确保之前使用过 void Set_Servo_Angle(unsigned int angle) 函数设置过角度 ******************************************************************/ unsigned int Get_Servo_Angle(void) { return Servo_Angle; }
在文件bsp_sg90.h中,编写如下代码。
/* * Change Logs: * Date Author Notes * 2024-06-25 LCKFB-LP first version */ #ifndef _BSP_SG90_H #define _BSP_SG90_H #include "board.h" #define RCC_SIG_GPIO_ENABLE() __RCC_GPIOA_CLK_ENABLE() #define PORT_SIG CW_GPIOA #define GPIO_SIG GPIO_PIN_6 #define GPIO_AF_SIG_ENABLE() PA06_AFx_GTIM3CH1() #define RCC_SIG_TIMER_ENABLE() __RCC_GTIM3_CLK_ENABLE() #define BSP_SIG_TIMER CW_GTIM3 // 定时器 #define BSP_PWM_CHANNEL GTIM_CHANNEL1 void SG90_Init(void); void Set_Servo_Angle(unsigned int angle); unsigned int Get_Servo_Angle(void); void TIM3_PWM_Init_AllChannel(void); #endif
四、移植验证
在自己工程中的main主函数中,编写如下。
/* * Change Logs: * Date Author Notes * 2024-06-25 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_sg90.h" int32_t main(void) { int i = 0; board_init(); uart1_init(115200U); SG90_Init(); Set_Servo_Angle(180); delay_ms(1000); Set_Servo_Angle(0); delay_ms(1000); while(1) { Set_Servo_Angle(i++); if( i >= 180 ) { i = 0; } delay_ms(10); } }
移植现象:舵机从0度转到180度后,再从0度重新开始转。
模块移植成功案例代码:
链接:https://pan.baidu.com/s/1bWrJCuW5w55yN94rDQfZGQ?pwd=LCKF
提取码:LCKF
-
开发板
+关注
关注
26文章
6483浏览量
121319 -
舵机
+关注
关注
17文章
380浏览量
43432 -
CW32
+关注
关注
1文章
326浏览量
1986
发布评论请先 登录
舵机SG90
控制舵机SG90的教程
SG90马达使用介绍
SG90舵机的相关资料推荐
STM32驱动SG90舵机的方法
微雪电子SG90舵机简介

STM32驱动SG90舵机





评论