 不止于看见:AGV机器人基于视觉避障的理论基础
不止于看见:AGV机器人基于视觉避障的理论基础

在自动化和智能化不断推进的今天,自动引导车(AGV)在现代物流和制造领域中的作用日益凸显。然而,AGV的智能化不仅体现在其自主行驶的能力上,更在于其能够准确感知并规避复杂环境中的障碍物,确保安全与高效并行的能力。
随着视觉技术的发展,其在AGV领域的应用也越来越深入。借助图像处理算法,视觉摄像头能够实时获取环境中的图像信息,识别障碍物的位置和形状,甚至能够模拟人眼的立体视觉,提供更加丰富的深度信息。
视觉导航通过视觉传感器采集周围环境中的地理信息,经过图像处理和识别,生成导航指令。与非视觉类传感器相比,视觉传感器具有无噪声、无有害影响、信息量大等特点。在实际应用中,只需在路面上画出路径引导线或者路标图形, AGV就可以通过视觉导航系统来控制自身行走。
相对于埋设导线/磁条、安装磁钉等方法而言, 视觉导航进一步增强了系统的灵活性, 并且降低了安装使用成本,同时视觉识别也可以避免出现如惯性导航等虚拟路径导航方法存在的误差积累问题(在部分应用中,视觉可以作为惯性导航的误差校正方法)。相对于激光导航方法,视觉导航的优势在于其低廉的系统硬件成本以及识别功能的扩展能力——只要软件和模式识别功能足够智能,自动导引车就可以实现多种导航和定位功能。
 地牛AGV
地牛AGV
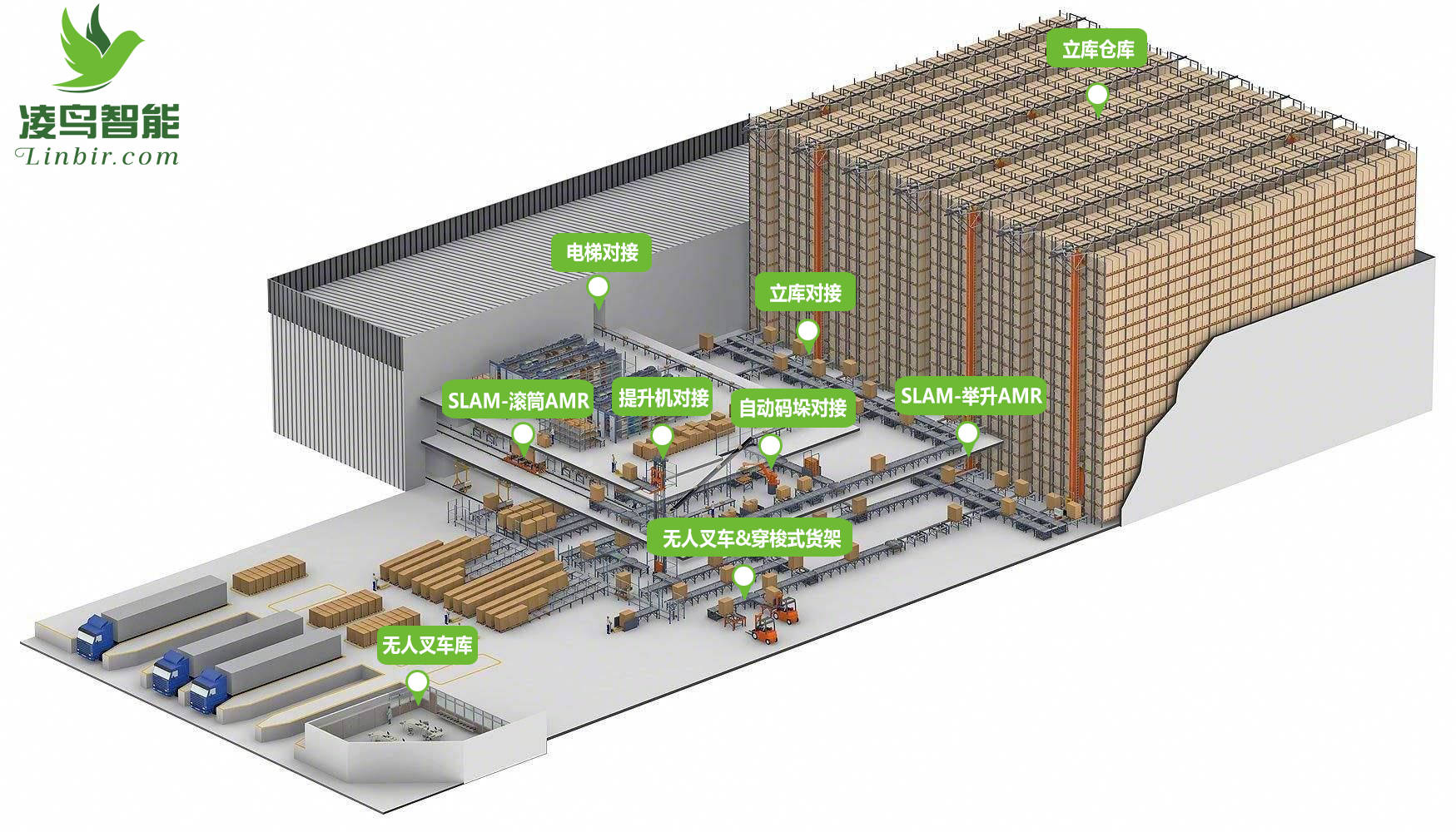
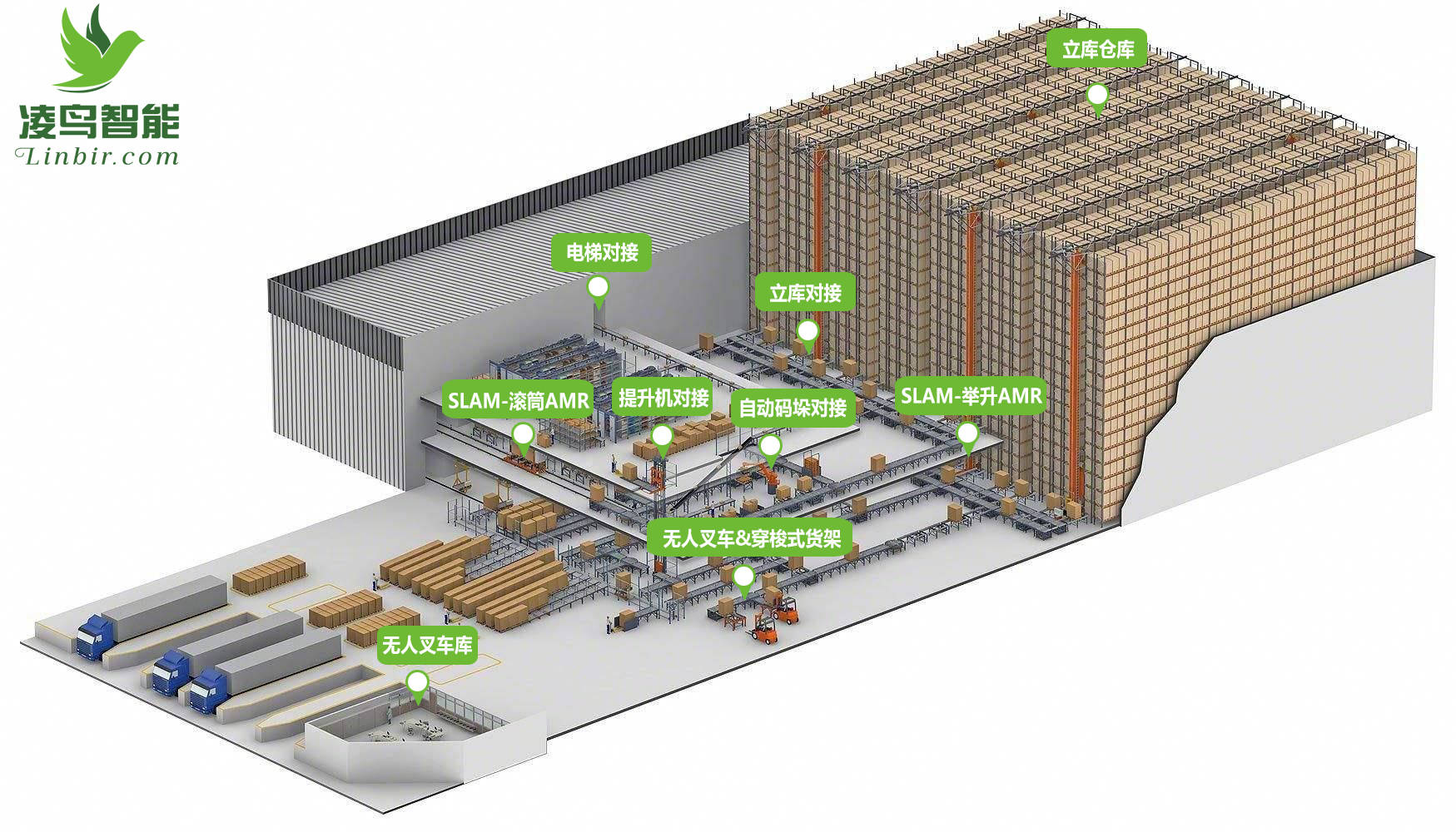
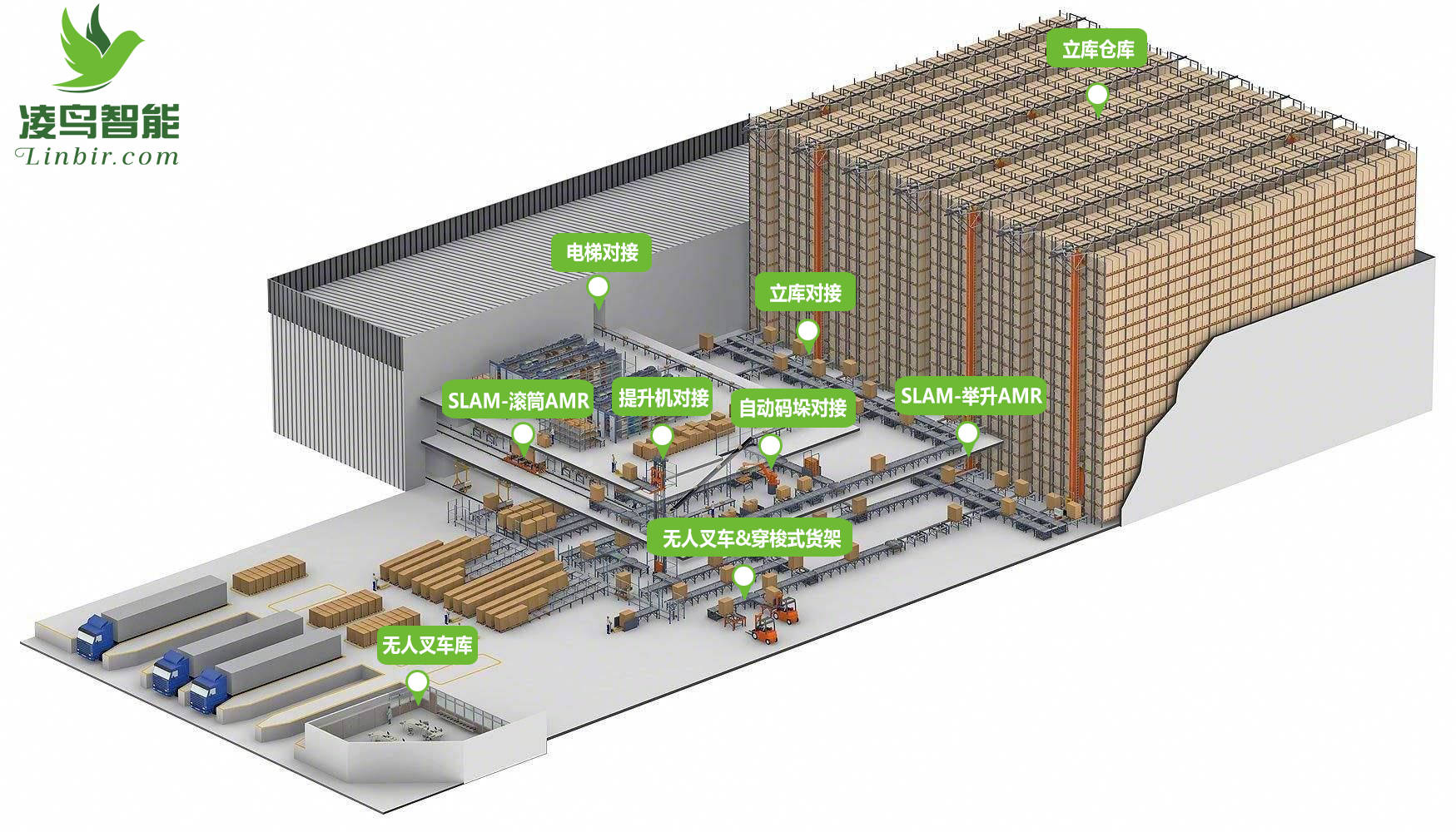
随着《中国制造2025》计划的提出,智能物流作为制造业升级的核心之一,正越来越引起传统制造业的重视。在全球经济步入“寒冬”的大背景下,大量传统制造业企业开始谋划转变。通过引入AGV系统提升厂内物流效率、降低运营成本,已经成为制造业升级的趋势之一。
视觉识别导航方法,由于其对地面适应性广、地理标签耐重载、导航精度高、硬件成本低等优点,已经在电子制造、家电生产、电气制造等工业领域得到成功应用。由于视觉导航技术有一定的技术难度,因此目前国内的应用数量少。随着视觉导航系统硬件成本逐渐下降,以及导航技术的不断发展,这类AGV系统将进一步扩展在制造业厂内物流系统中的应用。
 AGV叉车
AGV叉车
审核编辑 黄宇
-
机器人
+关注
关注
214文章
31634浏览量
224519 -
AGV
+关注
关注
28文章
1585浏览量
43850
发布评论请先 登录
无人机飞行避障里的黑科技

基于米尔RK3576核心板的国产割草机器人解决方案
固态激光雷达参数以及避障视频
无人机激光避障和360度避障哪个好?

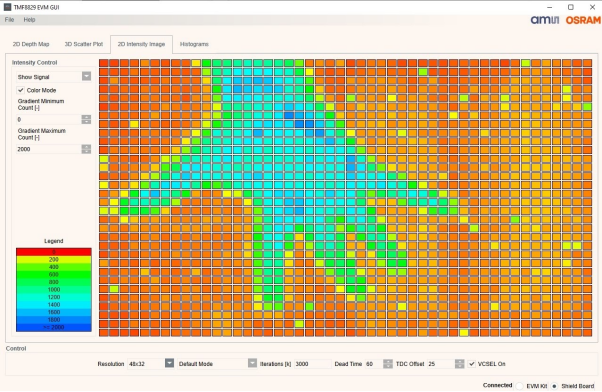
赋能机器人“慧眼”:TMF8829 48x32 多区 dToF 传感器,定义避障新高度
AGV机器人如何提升搬运效率?
AGV机器人如何精准识别库位有无货物?
【案例分享】电子谷多芯线束赋能高效产线!AGV 搬运机器人稳定连接方案

复合机器人对比传统AGV和机械臂的优势何在?

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
AGV机器人选型技术分析与应用策略
盘点割草机器人六大避障传感器
AGV机器人如何实现毫秒级避障?深度解析多传感器融合的核心技术




评论