 要掌握PID算法需要深刻理解反馈机构和执行机构以及了解自身特点
要掌握PID算法需要深刻理解反馈机构和执行机构以及了解自身特点

PID算法,不管是原理上,还是代码上都比较简单。主要运用在电机控制、开关电源、电源管理芯片等领域。
一般《自动控制原理》上给的是位置式算法,如下图所示。
原因在于你对这个系统的反馈机构理解得不够。
比如,716空心杯电机,设定在100转/秒,但是你却用了50M时钟让PID算法工作,假设PID是全并行的(数据吞吐量也达到50M)。
这时,不管你怎样调参数,电机都不受控制,一下子很快,一下子很慢。静下来想想,不难发现问题。
假设电机瞬时转速是101转/秒,光电开关大概每隔4.95毫秒才反馈一个速度量过来,在这期间是没有反馈的。
设定的转速是100转/秒,用工作在50M全并行的增量式PID算法,在4.95毫秒内,不断地累积1转/秒的误差,期间被PID算法作用了247.5次!
也就是说,因为PID的工作频率太高,积累误差的速率太快(从另一个角度来看就是反馈机构太慢),所以电机不受控制,这时,你把PID的工作频率降下来,就会发现,电机渐渐地受控制了。
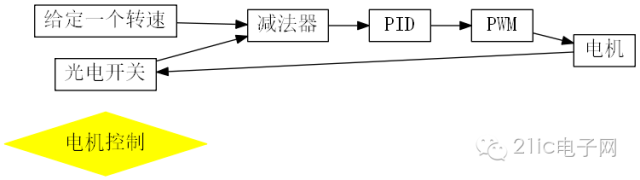
下面给一个在FPGA中使用PID算法做电机控制的完整框图。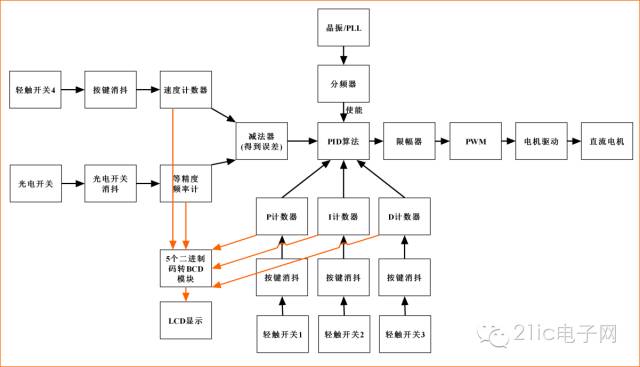
综上所述,控制类算法,除了要关注算法本身的特点以外,还要深刻理解反馈机构和执行机构。
BTW,一般来说,电机控制用PI或者PD控制就可以了,如果用PID三个环节的话,一来参数不容易调节,二来容易自激,当然也不排除某些特殊场合需要用PID三个环节,甚至还会用到三环控制(速度环、相位环、电流环)。此外,除了PID以外,常用的控制类算法还有模糊控制、MPC(模型预测控制)算法。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PID
+关注
关注
38文章
1511浏览量
92408
原文标题:要掌握PID算法 要深刻理解反馈机构和执行机构
文章出处:【微信号:weixin21ic,微信公众号:21ic电子网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
蓄电容执行机构的新突破
情况以及阀门的运转状况。 可在软件上读出的信息有: 运转状况:通电次数、停电切断次数、信号切断次数、电机运转累计时间、电机运转次数(1s以上及以下);环境参数有:执行机构内部最高
发表于 06-09 16:32
执行机构的新突破
温度范围内,60℃以上,-10℃以下);异常次数:超载错误、运转超时间;以及用图表形式显示的执行机构内部温度图,电机电流图,蓄电容电压图等等。 通过这些参数,用户可以清晰的了解到执行机构
发表于 07-25 18:58
用直流电机控制执行机构,执行机构如果出现抖动,如何用程序判定?
用直流电机控制执行机构,执行机构如果出现抖动,如何用程序判定(判定方法)?机械原因的抖动和反馈信号原因产生的抖动!
发表于 02-23 09:11
消息队列执行机构运动一直不停止
停止,停3s后继续完成同样的任务。我采用了任务1控制小车运动,用消息队列给执行机构发送消息,但是执行机构运动一直不停止,小车停止后不再继续运行。麻烦给一下解决思路或建议,谢谢。补充:停几秒只是一个假设实际中不是那么精准,要完成动
发表于 04-14 04:35
电动执行机构传递函数的研究
介绍了一种获得电动执行机构传递函数的新方法。该方法从分析电动执行机构的各个组成部分出发,最终推导出以供电电压为输入、反馈电压为输出的开环传递函数,并通过求解微
发表于 03-17 15:36
•16次下载
基于DSP的电动执行机构的设计与实现
智能电动执行机构的研究是工业控制领域的热点问题之一。本文论述了一种基于DSP 的电动执行机构的研究工作。本电动执行机构采用三相混合式步进电动机为动力、以DSP 为控制
发表于 01-13 17:19
•18次下载
基于CAN总线的电动执行机构的设计
智能电动执行机构实现远程监控是目前研究的热点。本文介绍了基于CAN总线通讯的智能电动执行机构的设计思路及实现方法,具体介绍了电动执行机构的控制电路、驱动电路及CAN总线
发表于 02-21 14:18
•25次下载
基于DSP实现的SDZ智能电动执行机构
论述了SDZ智能电动执行机构的设计与开发。结合SDZ执行机构的功能特点,介绍了智能电动执行机构的基本功能。给出了系统的硬件结构以及程序的总体
发表于 03-02 13:52
•21次下载
执行机构和定位驱动器介绍
对于执行机构最广泛的定义是:一种能提供直线或旋转运动的驱动装置,它利用某种驱动能源并在某种控制信号作用下工作。因为越来越多的工厂采用了自动化控制,人工操作被机械或自动化设备所替代,人们要求执行机构
发表于 10-24 16:39
•3次下载
基于微机技术和执行器技术为一体的电动执行机构的设计方案
提出一种新型电动执行机构的设计方案,详细介绍了该执行机构各功能元件的选型与设计、阀位及速度控制原理以及各种关键问题的解决方法。该执行机构将阀门、伺服电机、控制器合为一体,采用8031单
发表于 01-05 09:06
•2341次阅读



评论