 控制工程基础案例7
控制工程基础案例7

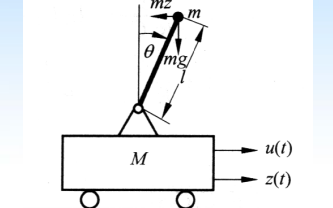
车或者四分之一主动悬架模型可以简化成如图1所示的弹簧质量系统,图中U为主动控制力,当U=0时,模型转换为被动悬架模型;图中:M为车身质量,即簧载质量;m为悬架与车轮质量,即非簧载质量;K2、C2、K1分别为:弹簧刚度、阻尼器系数、轮胎刚度;Z0、Z1、Z2分别为:路面垂向输入位移、车轮垂向位移、车身垂向位移;元件现货上唯样M=345、m=40、K1=264800、K2=21000、C2=1300。
要求用Simulink搭建计算模型并求出车身、轮胎等参数;
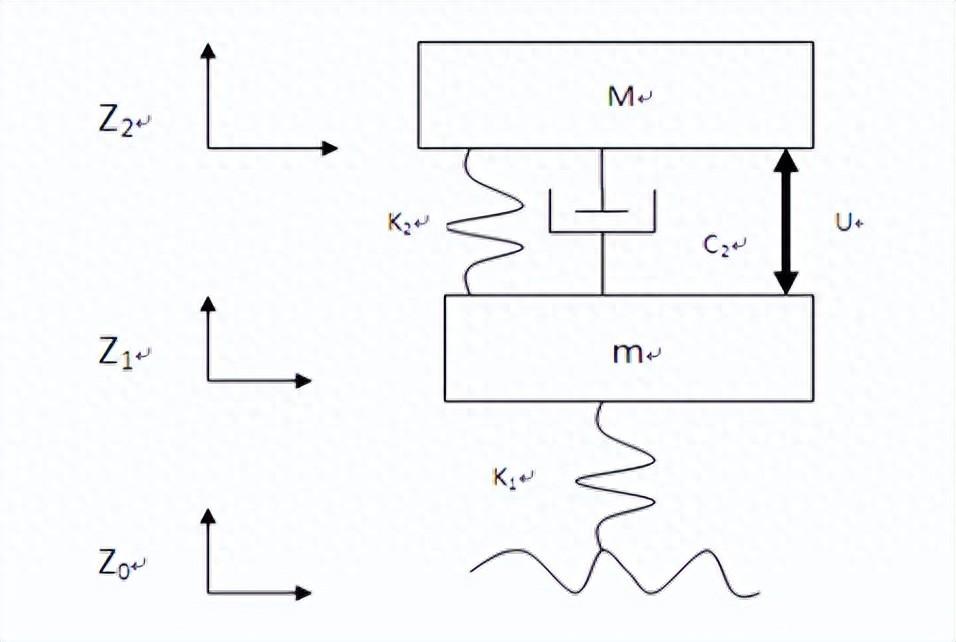
图1 弹簧质量系统(整车或者四分之一悬架)
微分方程:
Simulink模型如图2所示:
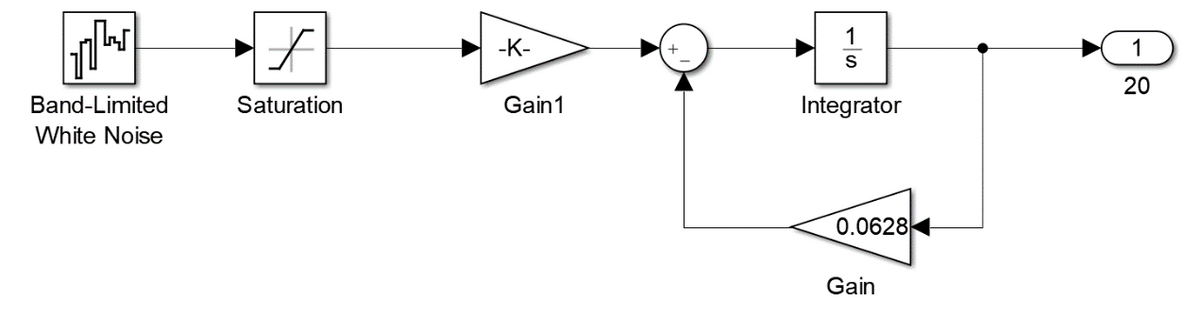
图2a Simulink路面模型
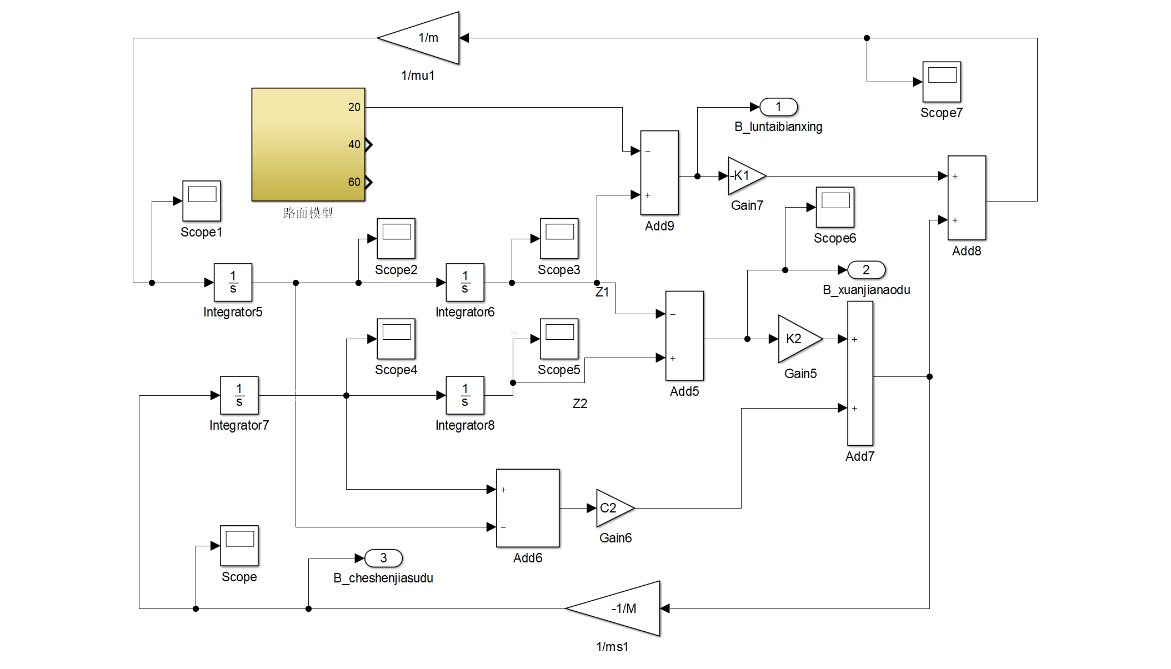
图2b Simulink整车模型
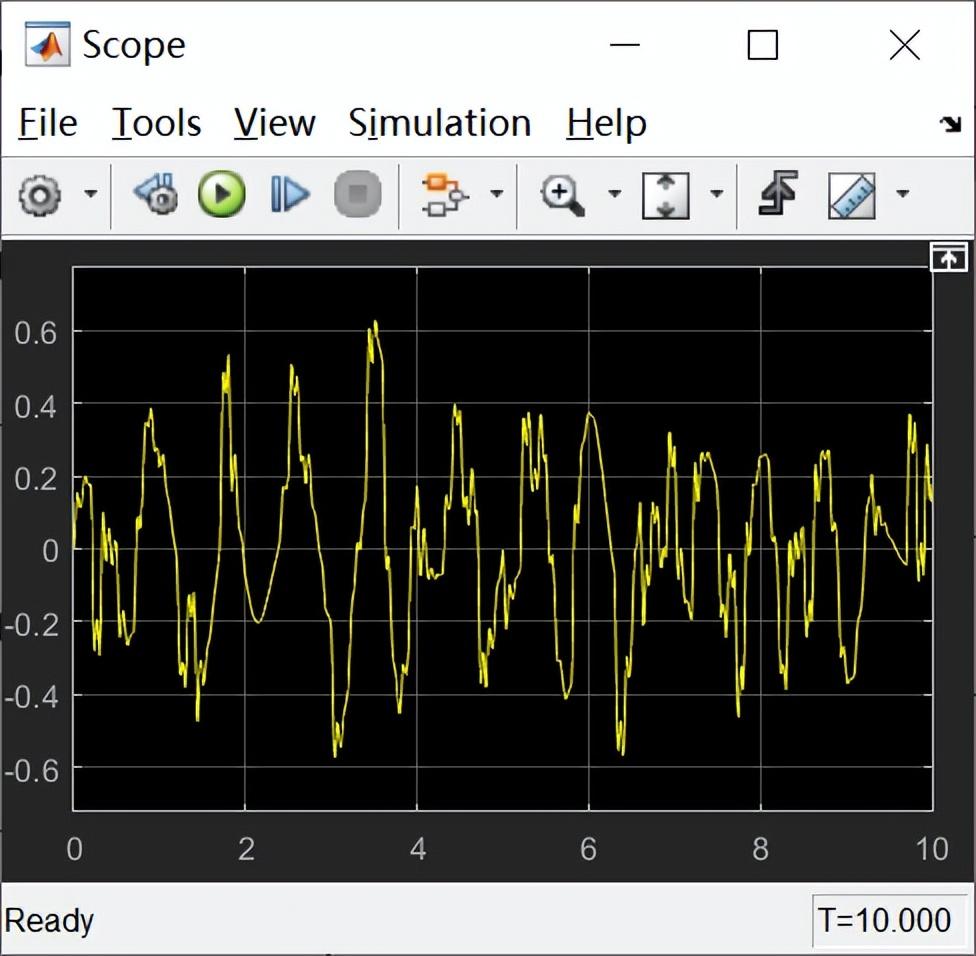
图3 车身垂向加速度
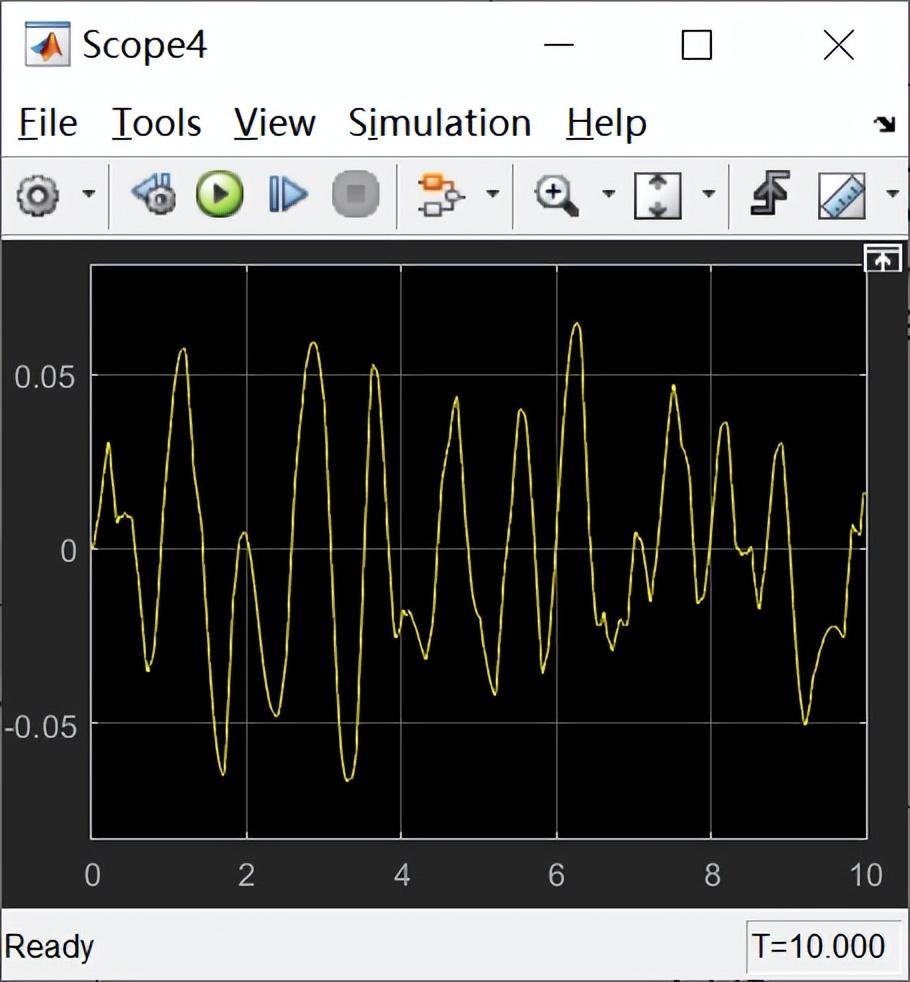
图4 车身垂向速度
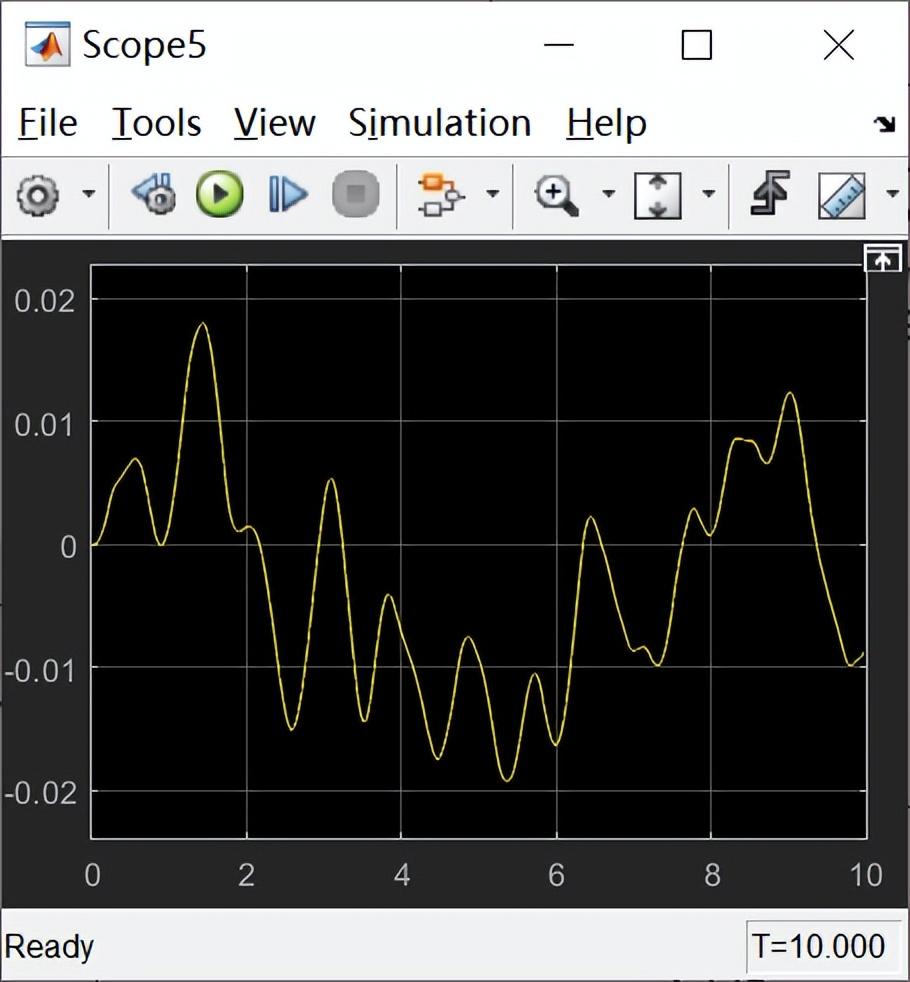
图5 车身垂向位移
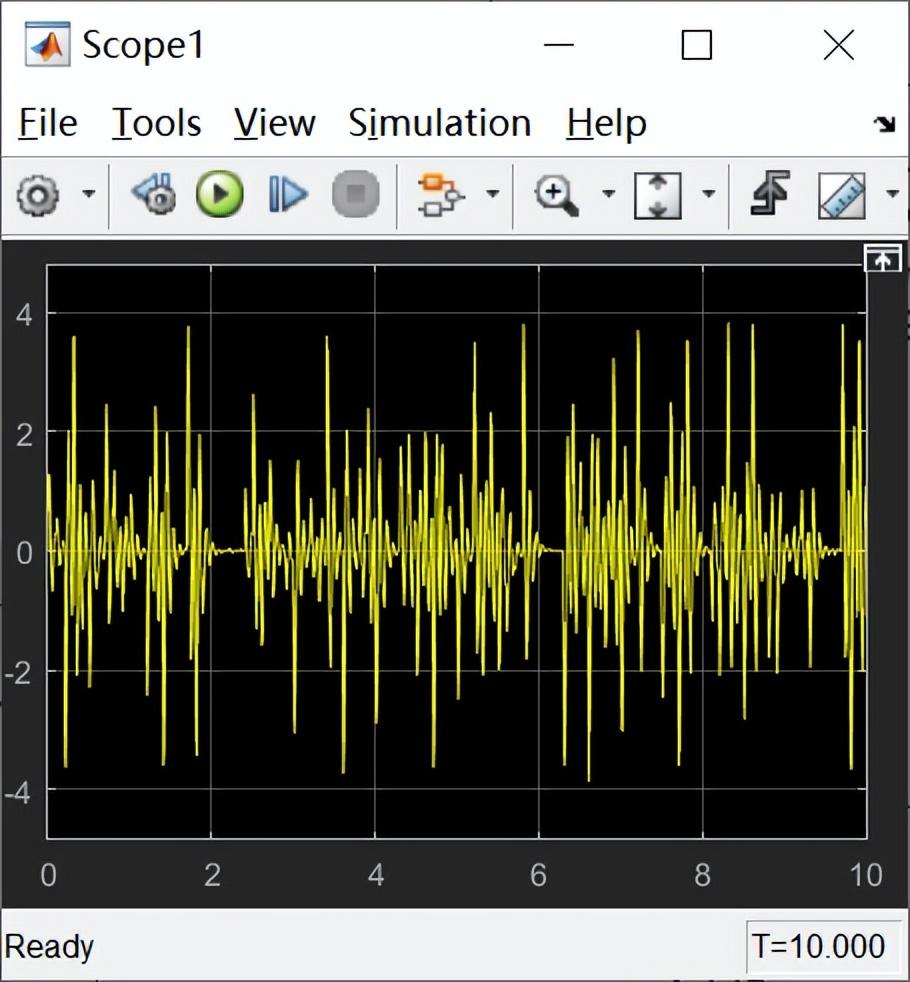
图6 车轮垂向加速度
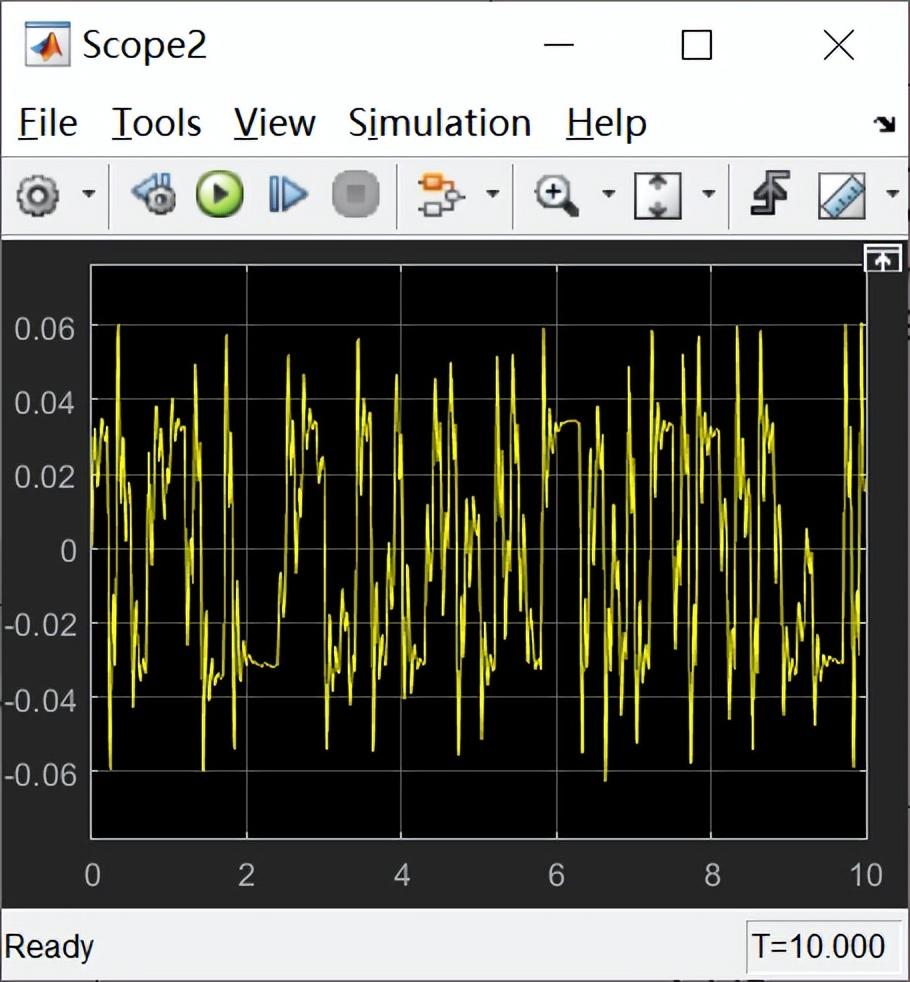
图7 车轮垂向速度
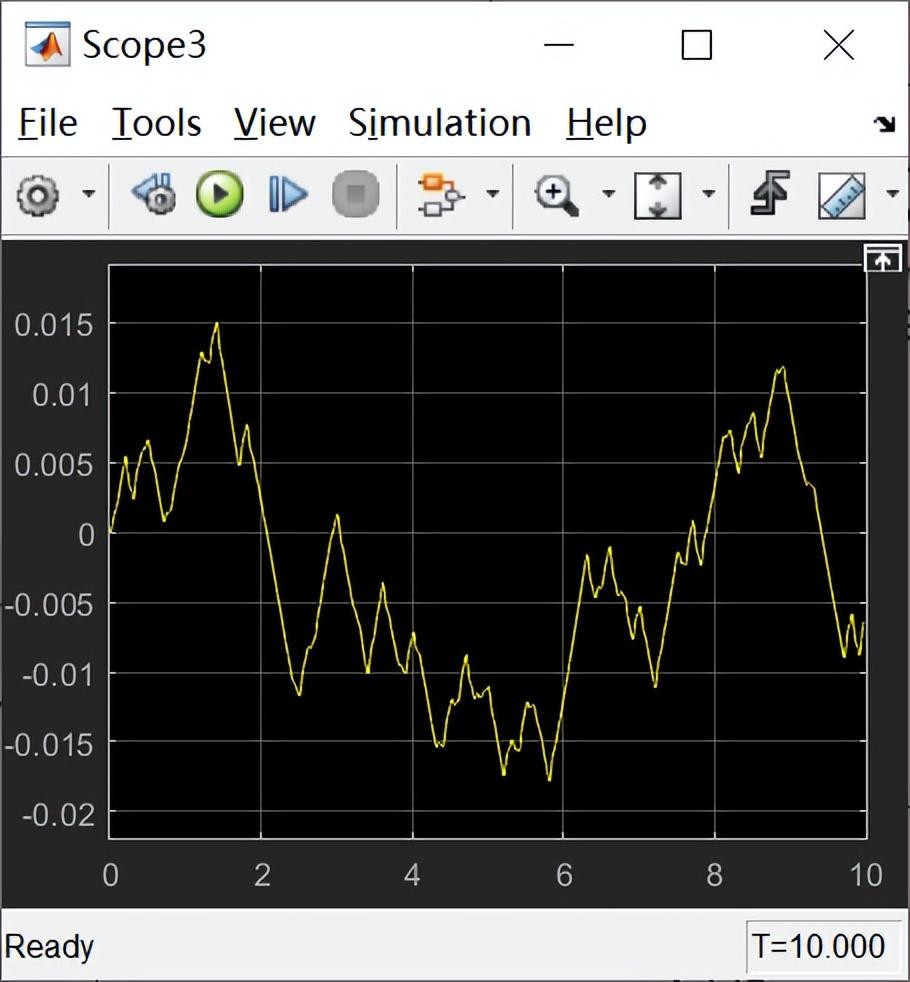
图8 车轮垂向位移
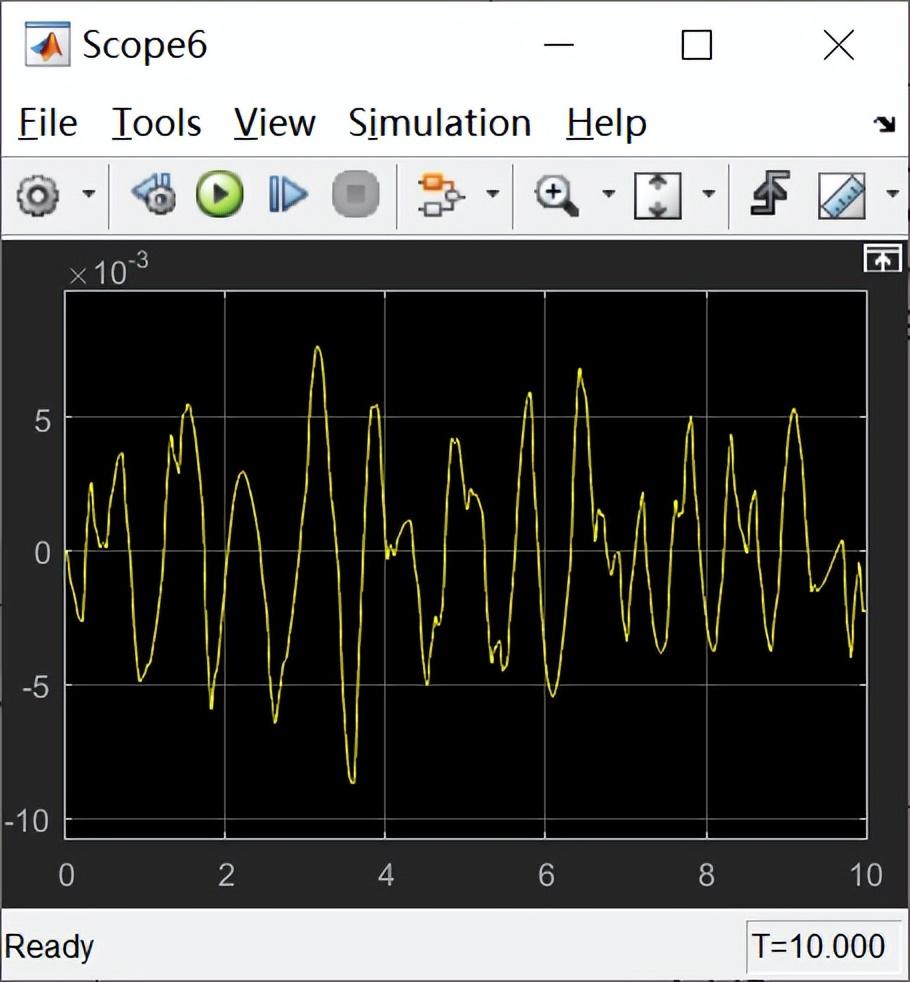
图9 悬架挠度
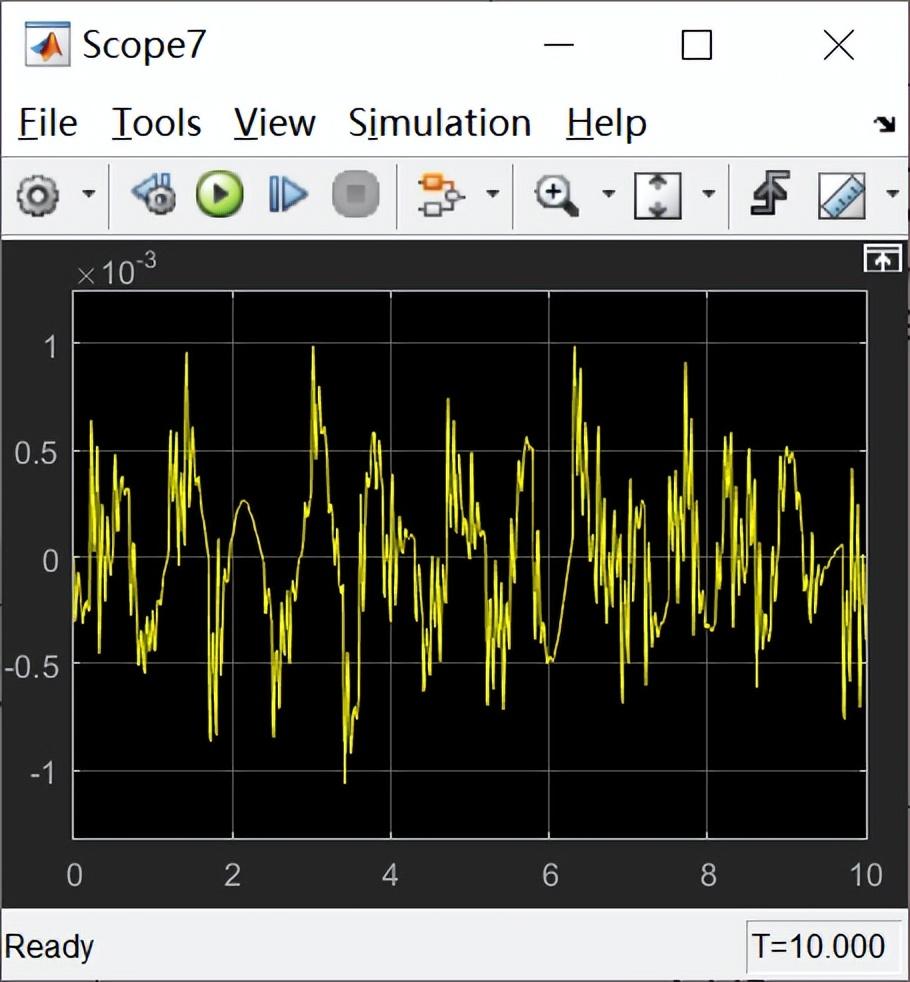
图10 轮胎动位移
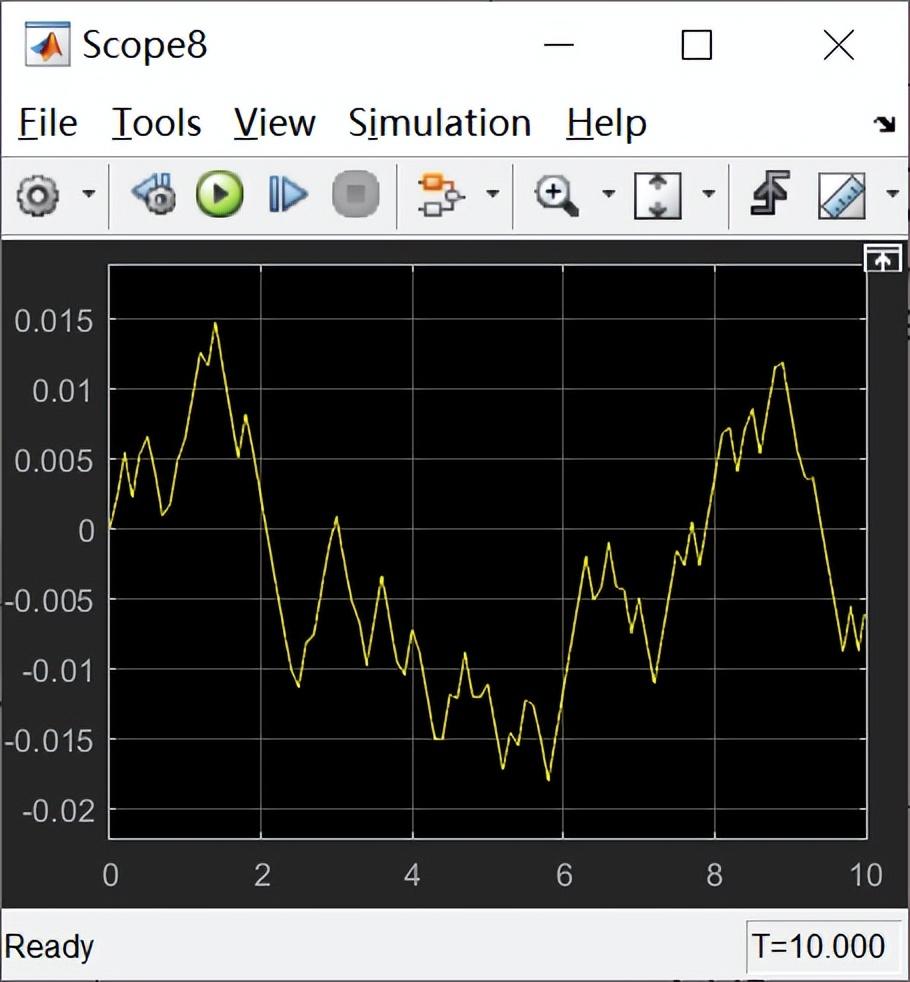
图11 路面输入(车身20公里每小时)
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Simulink
+关注
关注
22文章
549浏览量
65434 -
控制工程
+关注
关注
0文章
12浏览量
8983
发布评论请先 登录
相关推荐
热点推荐






高薪诚聘软件与控制工程师
信息,请联系info@troowin.comJob Title: (Senior) Software and Control Engineer软件与控制工程师/高级软件与控制工程师职责:燃料电池
发表于 09-27 12:57
控制工程实验教学大纲
《控制工程》实验教学大纲
课 程 名 称:控制工程英 文 名 称:Process Control Engineering课 程 编 号:082242实 验 课 性
发表于 05-17 10:14
•6次下载
过程装备与控制工程系实验室简介
过程装备与控制工程系实验室简介
过程装备与控制工程实验室隶属于化学工程学院实验室。主要职责是进行本科生的实验、实践教学
发表于 05-17 10:08
•2384次阅读





 工商网监
工商网监
评论