 四元数在工业机器人编程操作中的应用
四元数在工业机器人编程操作中的应用

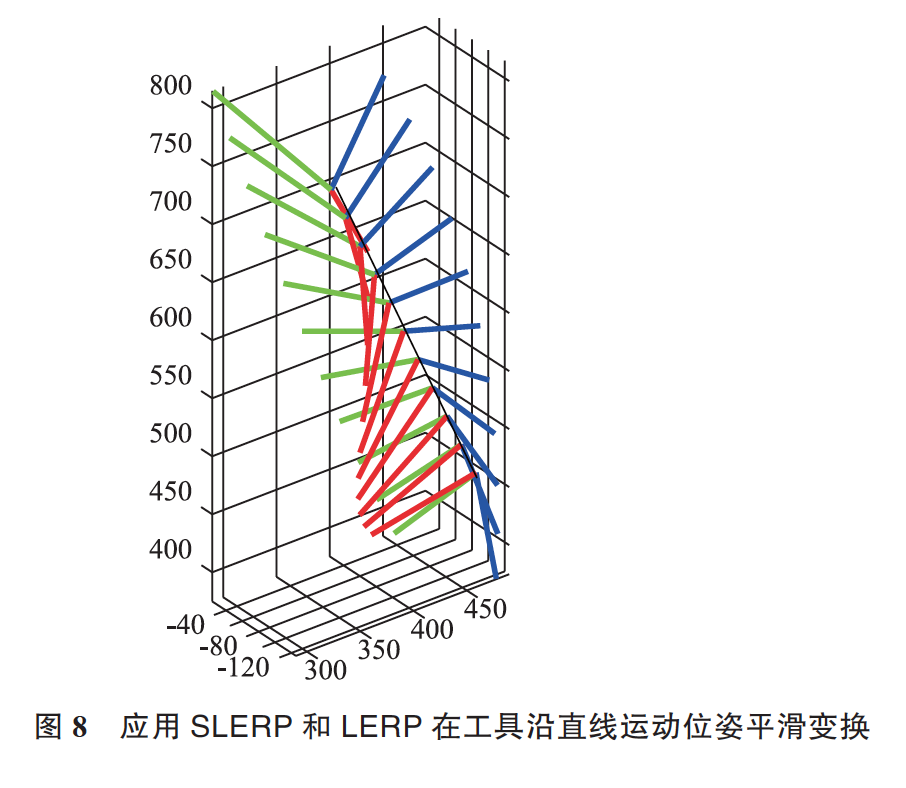
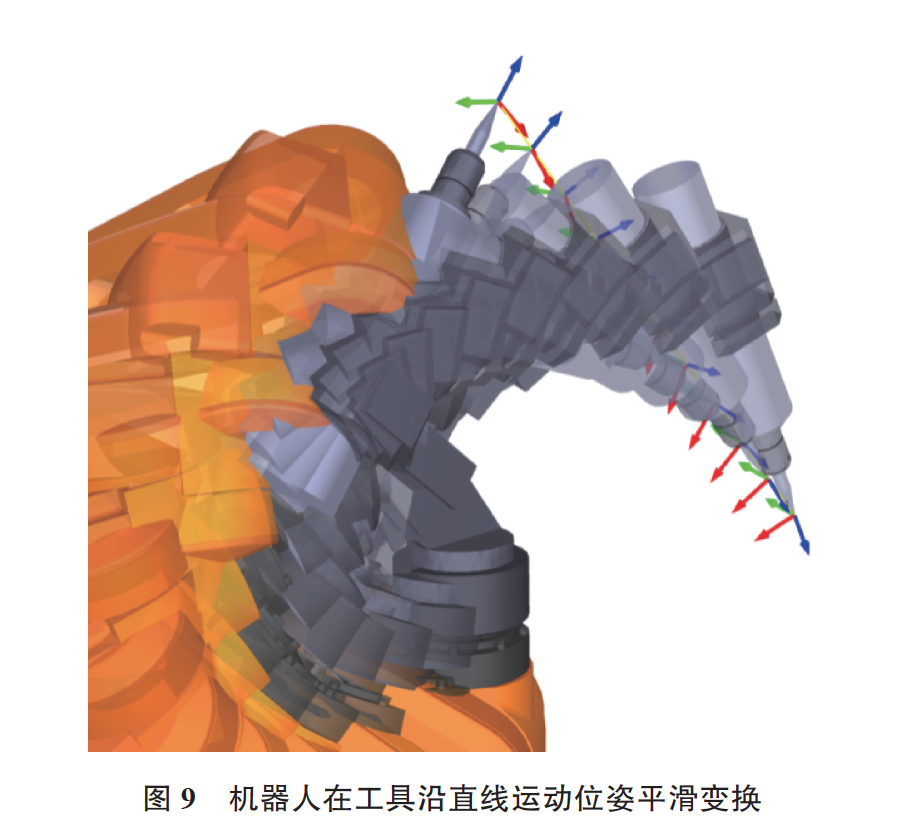
姿态规划在机械臂控制中占有重要的地位,在编程操作时需要应用姿态变换平滑性的插值算法确保机械臂工具动作的柔和度。首先分析四元数法用作姿态描述和变换的数学基础,然后应用四元数姿态插补算法SLERP 编程计算工具姿态变换的旋转角度,用于准确地检测工具角位移的精确度和重复精度,最后引入实例编程说明如何应用四元数姿态插补算法SLERP 和LERP 实现机器人工具姿态的平滑变换。
01
姿态规划在机械臂控制中占有重要的地位,在编程操作时需要应用姿态变换平滑性的插值算法确保机械臂工具动作的柔和度。首先分析四元数法用作姿态描述和变换的数学基础,然后应用四元数姿态插补算法SLERP 编程计算工具姿态变换的旋转角度,用于准确地检测工具角位移的精确度和重复精度,最后引入实例编程说明如何应用四元数姿态插补算法SLERP 和LERP 实现机器人工具姿态的平滑变换。
02
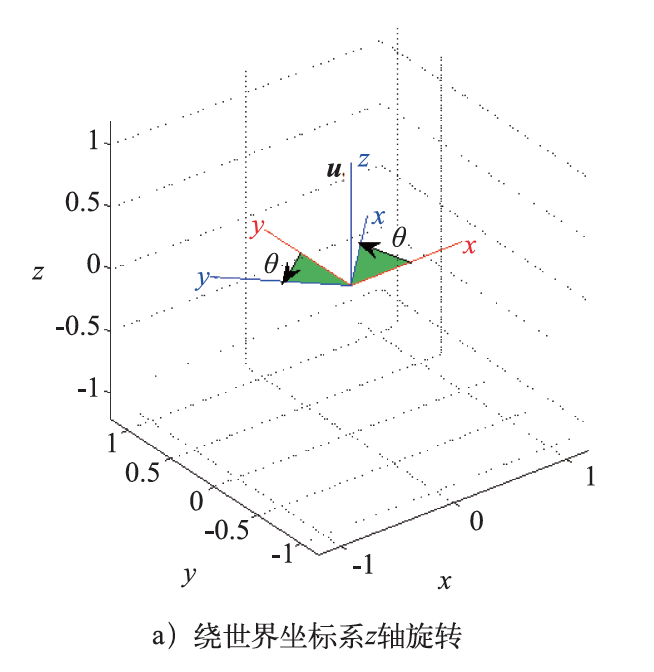
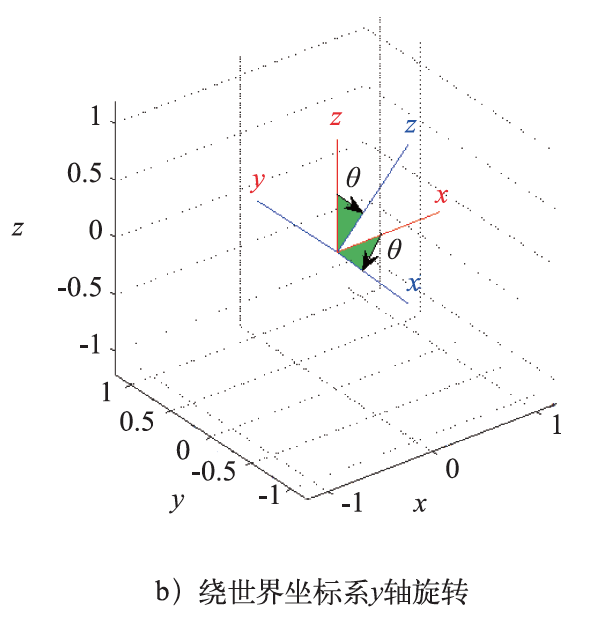
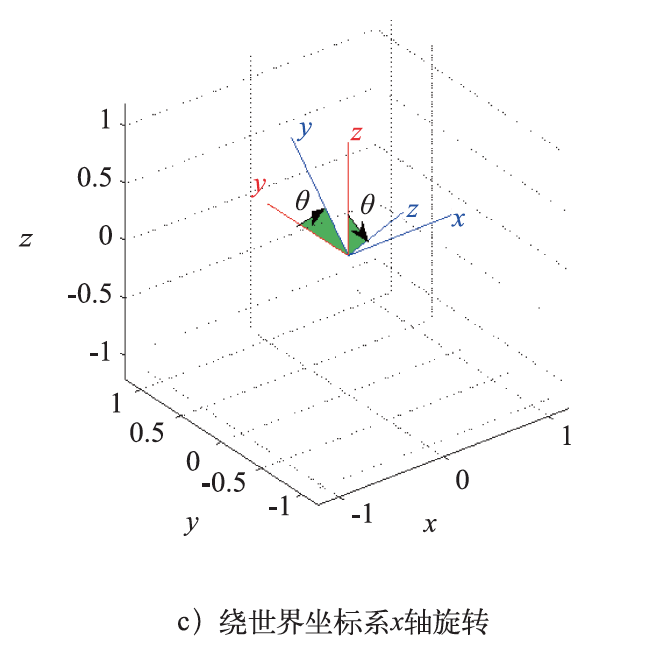
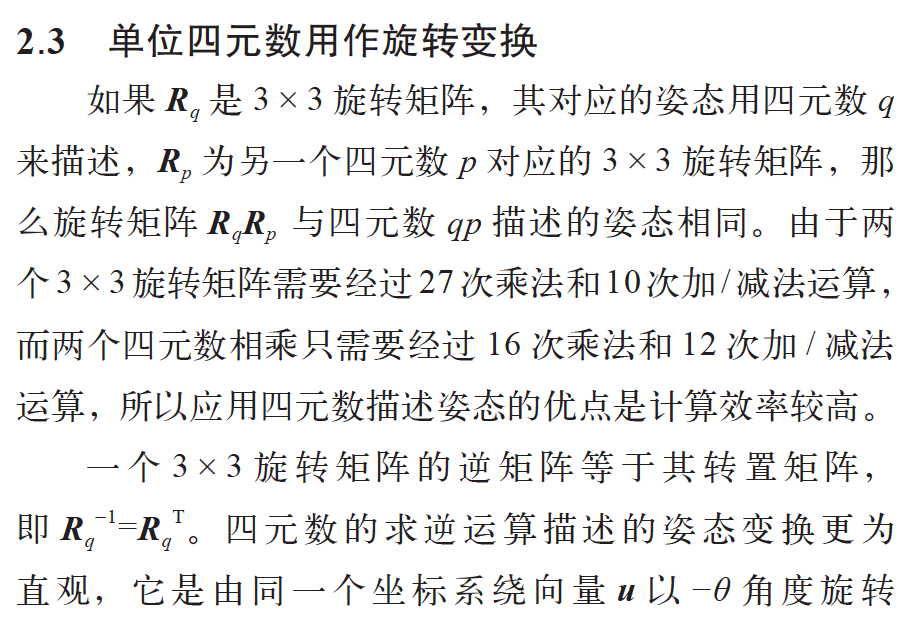
四元数用作姿态描述和旋转变换




03
应用四元数检测工具的角位移
04
结束语
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
工业机器人
+关注
关注
91文章
3557浏览量
98639 -
插补算法
+关注
关注
1文章
6浏览量
8473
原文标题:【主题策划】四元数在工业机器人编程操作中的应用
文章出处:【微信号:CADCAM_beijing,微信公众号:智能制造IMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
[转帖]工业机器人的基础知识
的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作
发表于 05-18 22:03
工业机器人的四大核心部件
`工业机器人的核心部件包括机器人本体、减速器、伺服电机、控制系统等四大部分,这4部分分别占总成本的22%、24%、36%、12%。 笔者从中国国际
发表于 02-12 10:17
工业机器人与金属成形机床集成的四大应用
工业机器人与金属成形机床集成的四大应用 近年来,随着我国制造业转型升级压力增加和劳动力成本的不断攀升,越来越多的企业考虑以机器人换人。上海、南京、芜湖、沈阳、天津、青岛、重庆等地已陆续
发表于 12-04 15:01
四元数数控:工业机器人使用机器视觉系统的原因
模式,逐渐向以工业机器人为主导的生产模式转变。但是,随着科技的发展和进步,原有单纯采用通过示教和预编程来实现自动化工作的机器人产品在柔性生产
发表于 04-29 09:42
FANUC 工业机器人编程与联网相关资料推荐
工具 当IT 界在大谈工业4.0 ,工业物联网的时候,千万不要以为传统的自动控制公司也跟着我们嗨,它们依然非常传统。拿机器人领域来说,不同的厂家使用不同的
发表于 07-02 07:38
工业机器人仿真与编程
目录概述行走轴模型拆分行走轴模型导入仿真软件创建行走轴机械装置外部轴配置向导插件安装虚拟机器人系统创建行走轴系统配置机器人安装到行走轴行走轴运动控制文已经首发在个人微信公众号:工业机器人
发表于 09-07 08:57



评论