 无钻机钻探机器人推靠支撑机构设计与分析
无钻机钻探机器人推靠支撑机构设计与分析
摘 要:
基于新型无钻机钻探机器人,设计一种推靠支撑机构,对其进行结构设计和工作模型分析。该机构结构上采用两对轴向交错排布的液压缸,既增加了推靠支撑的行程,又增强了径向支撑强度;同时前后支撑机构和牵引机构协调配合,实现井下钻探机器人的径向偏置和轴向导向姿态调整。对关键环节进行力学分析和设计参数校核,保障机构的稳定性。样机的液压系统在30 MPa压力下稳定溢流,为机器人的最大推靠支撑力达到40 kN提供了现实依据。
0 引言
井下机器人是加强油气开发勘探的有力工具,具有成本低、风险低、环境友好、全自动和远程监控等特点,是未来智能油气钻探的发展方向[1-3],可在深井、超深井、大斜度井和大位移水平井中进行作业仪器的输送和其他辅助作业[4-5],如测井机器人、排水采气机器人[6]、钻孔机器人[7]、液压牵引机器人[8]和连续油管钻井机器人[9-10]。
轮式、伸缩式和獾式机器人是油气井下机器人的主要类型[4-5],均由支撑机构、能源供给、控制和驱动系统组成,其中支撑行走是基础[11],主要提供一个对井壁或套管的正压力,以获得摩擦力实现牵引爬行。支撑机构有自锁滑块、液压活塞、齿轮、蜗轮蜗杆、丝杠和凸轮等。
国外的Sondex轮式牵引机器人[12]、刀片式三连杆井下牵引机器人[13]及伸缩式井下牵引机器人[14]均采用双向锁止,但推靠支撑的每个机构只有一对支撑,机器人躯体容易产生偏移,且提供的牵引支撑力较小。国内的伸缩式双向锁止机构能提供较大的牵引力,但易发生自锁,产生井下卡堵[15]。Badger Explorer獾式钻探器[16]无须钻井平台,减少了工作程序和人力耗费,但钻速较慢,井孔被岩屑填充,无法进行钻井液录井和取心作业,支撑机构则需要提供更大的牵引支撑力。伸缩式钻探机器人通过牵引缸和支撑缸轴向布置[8],优化支撑机构和钻井液流道,以提供所需钻压,实现牵引及动态破岩[10-11]。
基于新型往复蠕动式无钻机钻探机器人[17],本文提出一种液压缸径向布置的推靠支撑机构,通过辅助支撑传递较大牵引力,通过躯体位置和姿态调整减少牵引时躯体与井壁的摩擦,以适应井下复杂环境。
1 推靠支撑机构与工作机理
1.1 推靠支撑机构设计
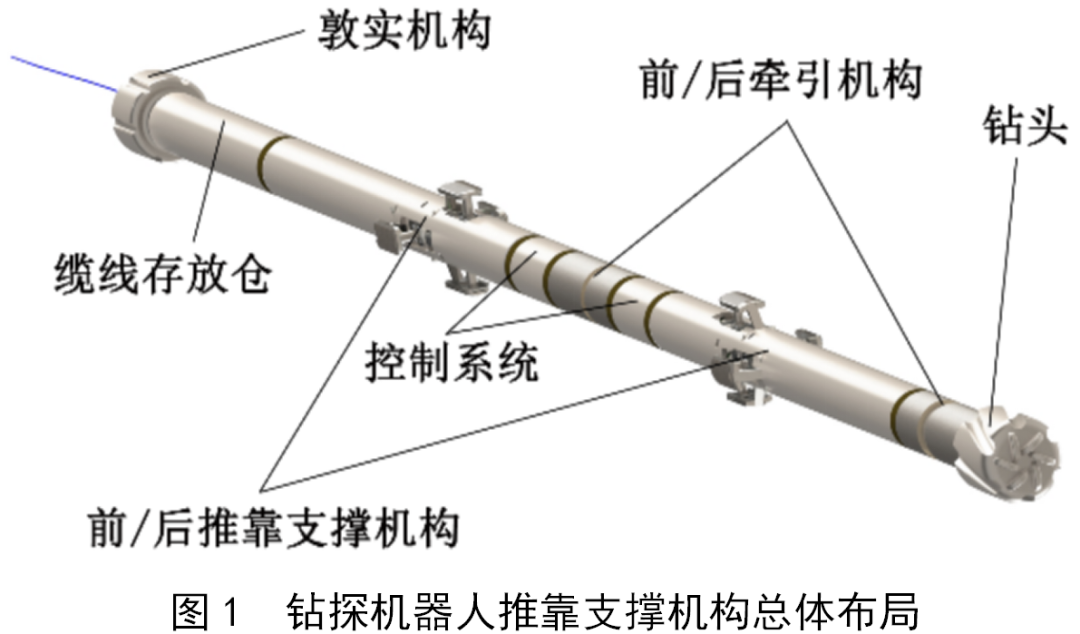
无钻机钻探机器人推靠支撑机构的总体布局如图1所示,主要由钻头、前/后推靠支撑机构、前/后牵引机构、敦实机构和控制系统等组成,且前/后支撑、牵引的机械结构相同,共同协调运转完成支撑和爬行动作。
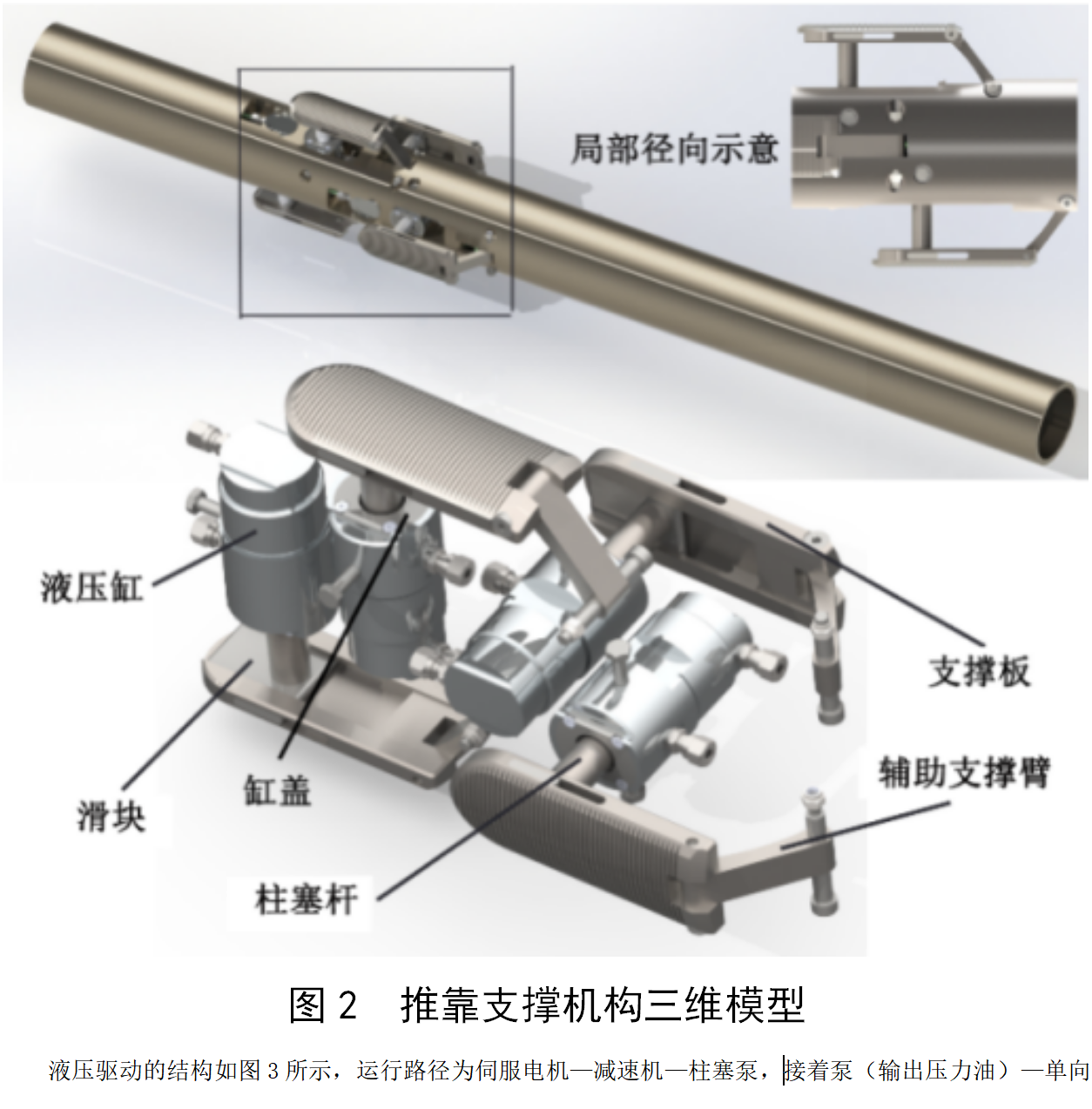
单个推靠支撑机械结构如图2所示,液压缸采用中心对称的方式,轴向呈十字支撑。双作用液压缸通过柱塞杆上的活塞分隔进油腔和回油腔,进油腔进油,柱塞杆稳定推出,回油腔进油,柱塞杆回收复位。
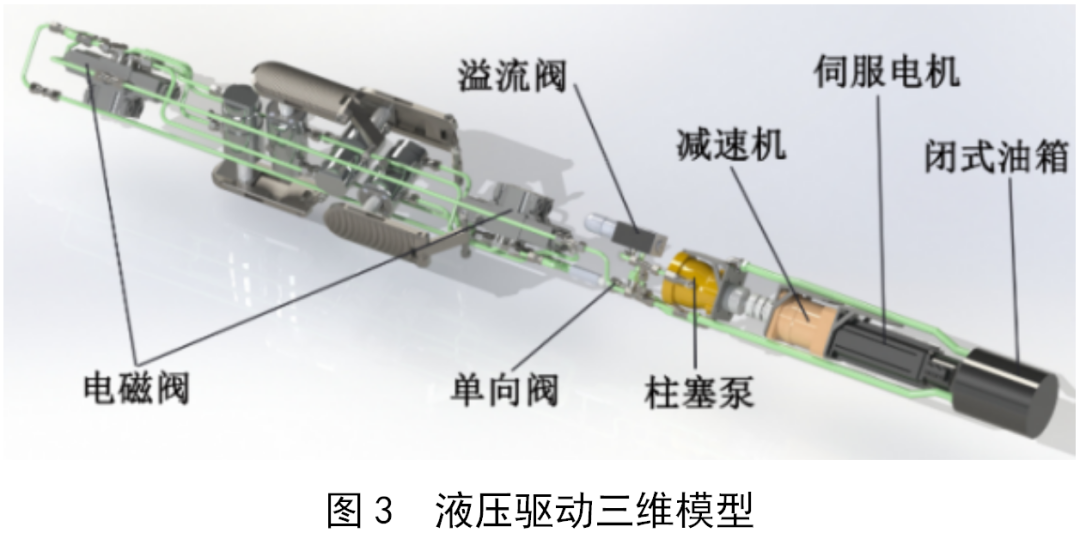
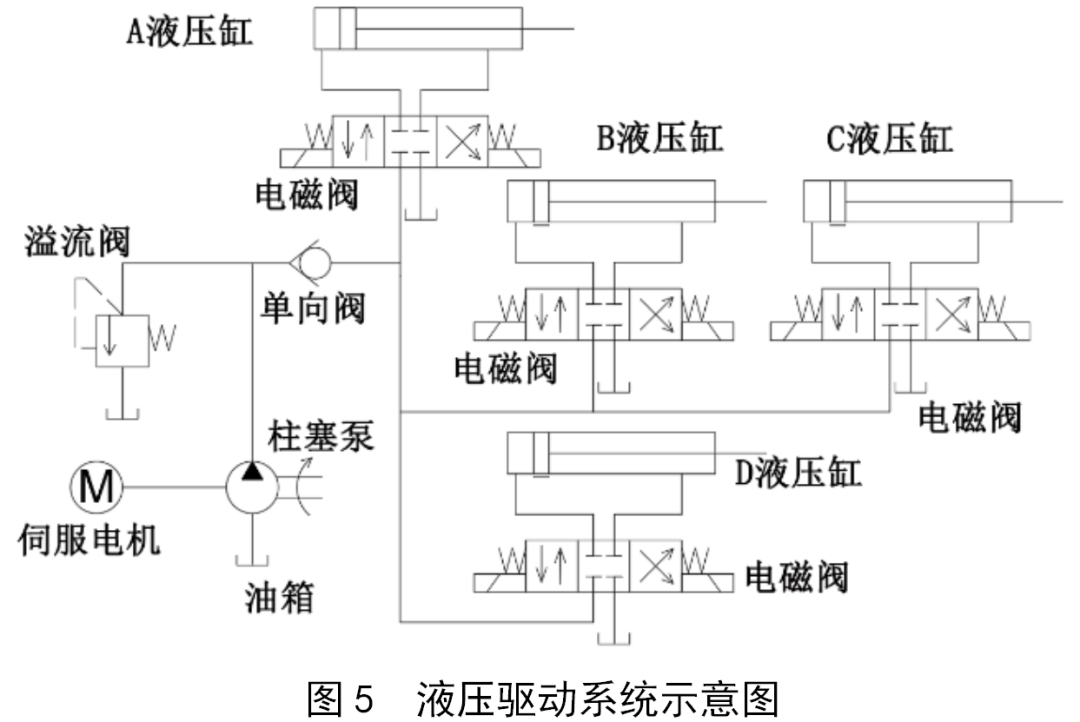
液压驱动的结构如图3所示,运行路径为伺服电机—减速机—柱塞泵,接着泵(输出压力油)—单向阀—溢流阀—电磁控制阀(4只)—液压缸,完成缸体控制。液压控制系统通过反馈信号(MPU-6050实时计算辅助支撑臂摆动姿态)实现柱塞杆伸出距离的定位并维持压力的恒定输出。
1.2推靠支撑原理
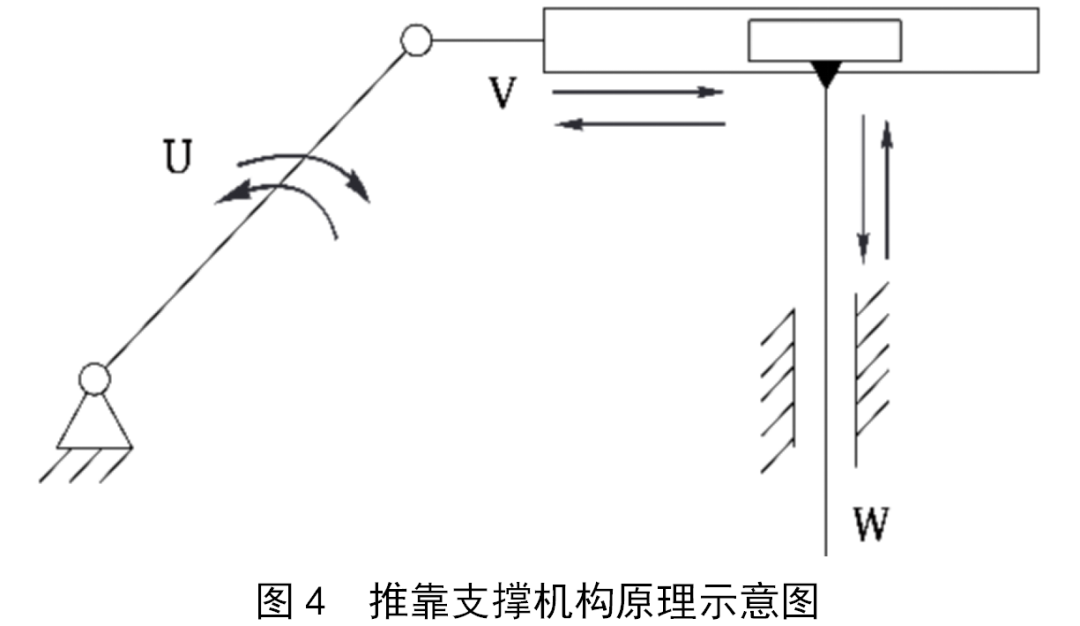
推靠支撑机构采用直动导杆滑块运动方式,如图4所示。柱塞杆W为动力杆,推动支撑板滑轨V同时上移和左移,辅助支撑臂U引导滑轨V保持水平状态与井壁平行。
1.3液压系统
液压系统能够提供较大的驱动力,但是其结构和元器件较为复杂,密封要求高。其四缸油路运行路径如图5所示。
1.4推靠支撑运动模态
前/后推靠支撑机构通过八个液压缸与牵引机构协调配合,完成无钻机钻探机器人的三种运动模态:钻进或回退、径向偏置调整、轴向姿态导向。
机器人的钻进动作通过推靠机构的支撑与伸缩来实现,状态a为初始状态,前/后推靠支撑板全部推出,并与井壁紧固支撑机器人躯体,其他各状态如图6所示,钻进时相应运动过程如下:
(1)状态a到状态b:前牵引机构缓慢伸出,推动钻头钻进至最大距离后,前推靠支撑机构柱塞杆收回,后推靠支撑机构保持稳定支撑。
(2)状态b到状态c:后牵引机构缓慢伸出,前牵引机构配合后牵引机构进行收缩,前推靠支撑机构向前伸出至最大距离后支撑板全部推出。
(3)状态c到状态d:后推靠支撑机构的支撑板全部收回,敦实机构配合后牵引机构缓慢收缩。
(4)状态d到状态e:后牵引机构收缩至最小位置,后推靠支撑机构全部推出支撑,整体恢复至初始状态a,周期动作完成,机器人获得一定的钻进深度。
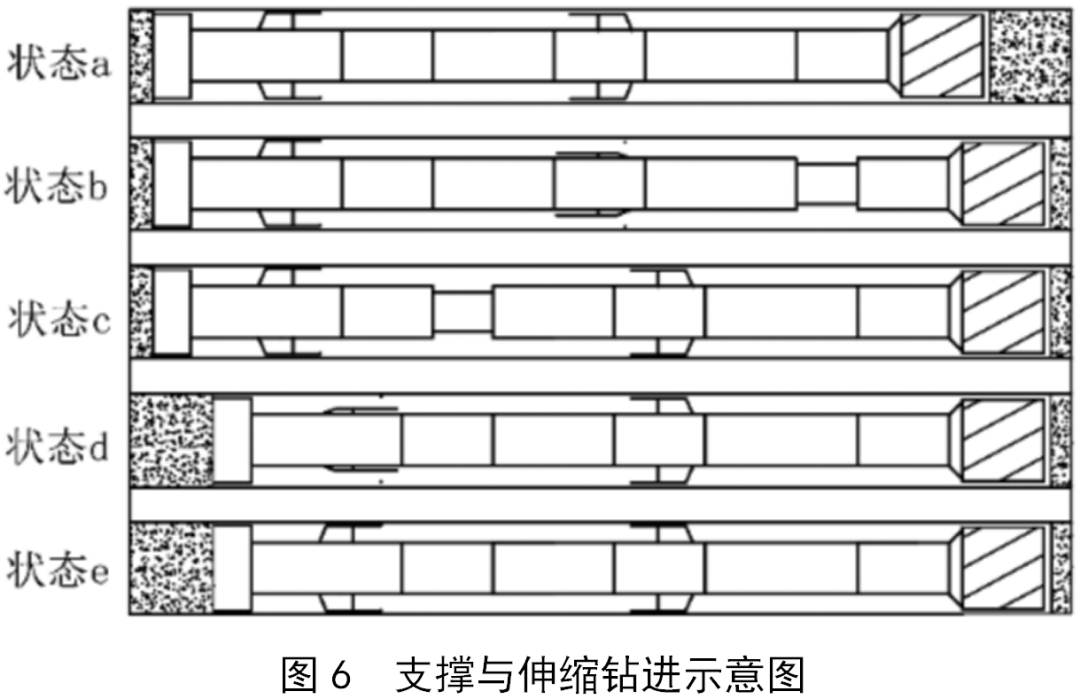
机器人回退动作与钻进相反,不再赘述。
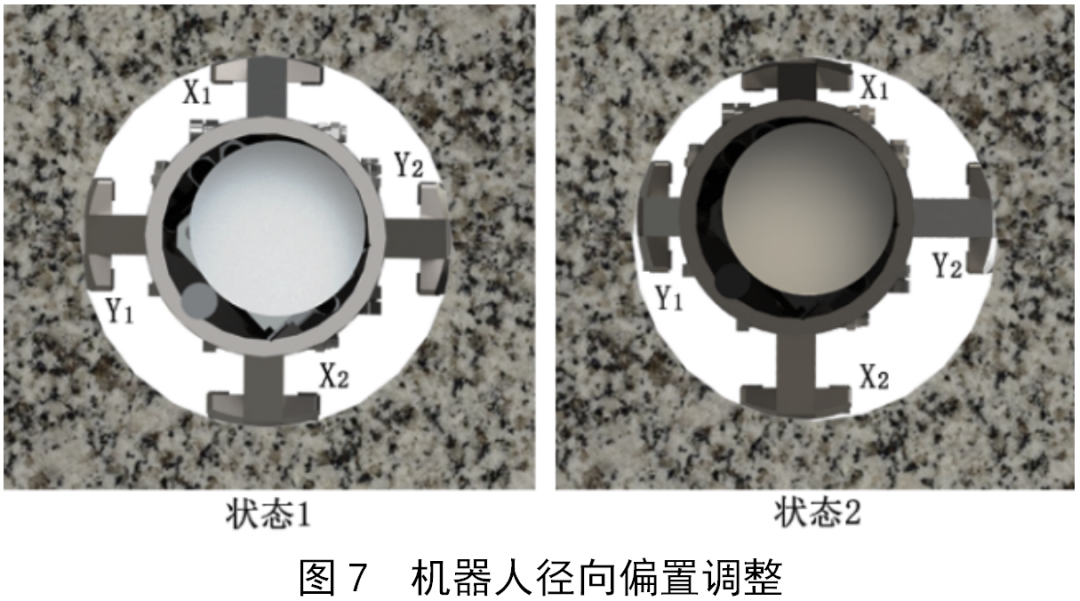
机器人的径向偏置调整过程如图7所示,状态1中,X1柱塞杆与X2柱塞杆、Y1柱塞杆与Y2柱塞杆均径向中心对称排布,沿轴向十字支撑。当两对柱塞杆在行程上协调同步收缩至状态2,X1与Y1柱塞杆收缩,X2与Y2柱塞杆伸出时,则可实现径向偏置。
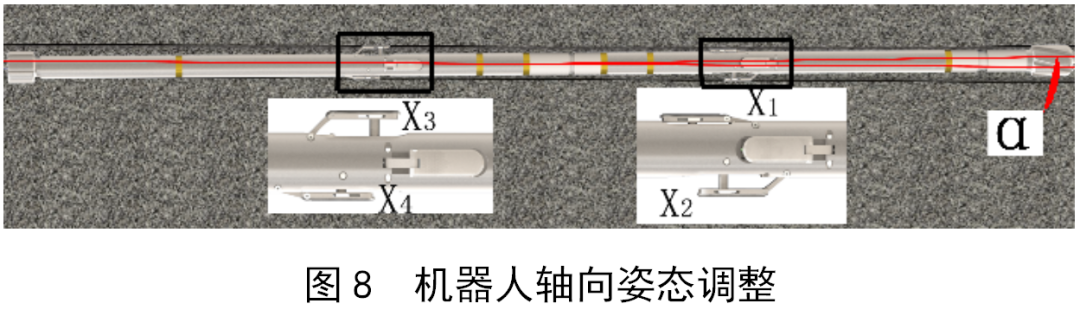
机器人的轴向姿态导向过程如图8所示,当X1与X4柱塞杆收缩、X2与X3柱塞杆伸出,另外的两对支撑协调伸缩,则机器人躯体轴线与井孔轴线倾斜一个角度α,同时牵引机构带动钻头按照其躯体姿态缓慢钻进,长距离累积后,可实现导向钻进。
2 推靠支撑机构力学分析
2.1机构承载力与支撑臂角度关系
推靠支撑机构的承载力(以下简称“机构承载力”)是指由机器人伸缩机构支持部分躯体伸缩前进时作用于支撑机构上的力(图6中状态a至b时,前推靠支撑机构需提供钻头钻进的钻压)。由于推靠支撑机构中心对称,受力基本对称,以图9中一对推靠支撑板为例进行受力分析。
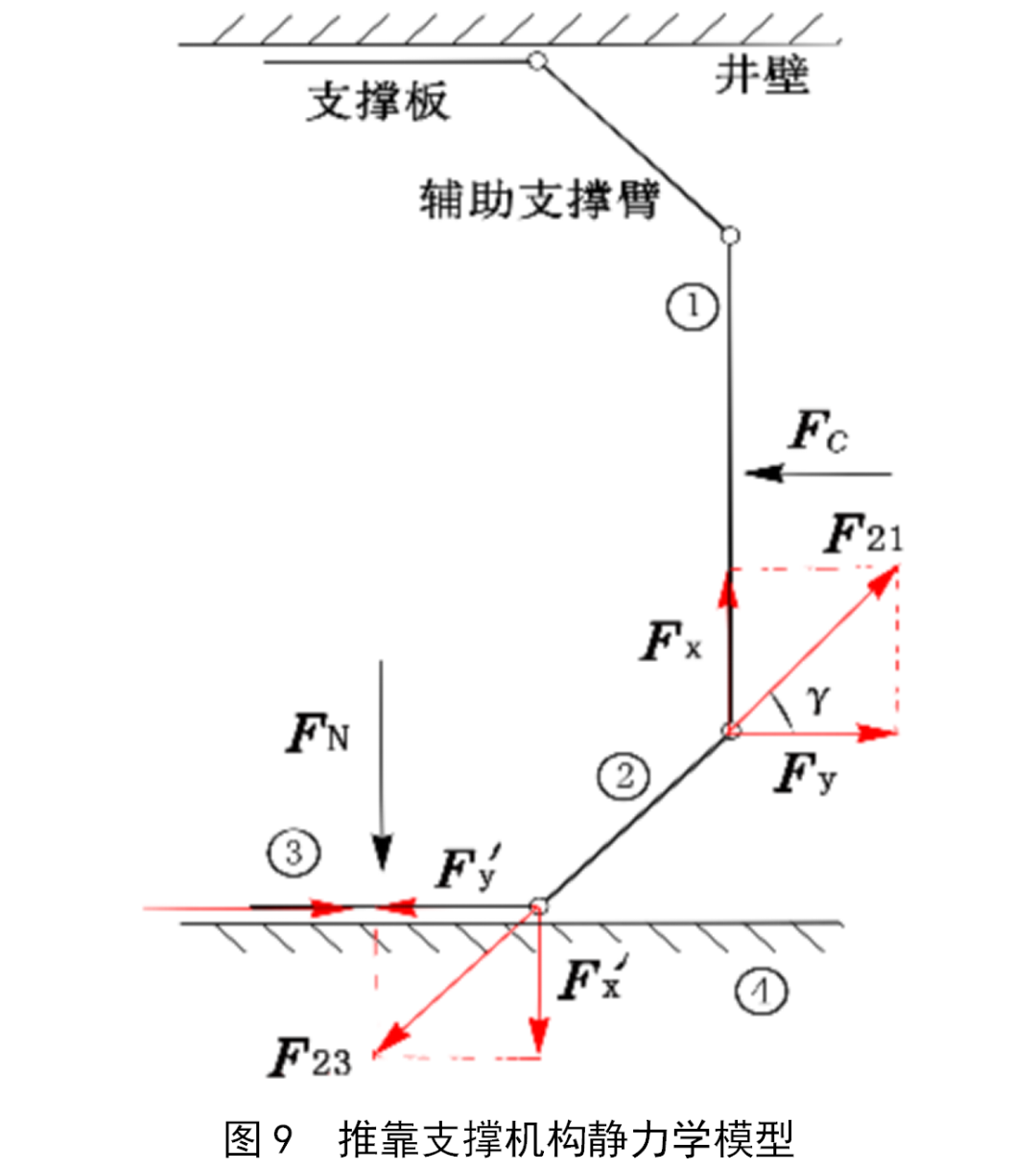
左侧辅助支撑臂②为二力杆,F21与F23是作用力与反作用力,大小相等,方向相反,作用在同一条直线上,分解出的Fx与Fx′大小相等,方向相反,Fy与Fy′亦同。综合受力分析得出机构承载力大小公式:

式中:FC为推靠支撑机构的承载力(N);μ为井壁的摩擦系数;FN为柱塞杆推出力(正压力)(N);γ为反作用力F21与承载力方向上所夹的锐角(°)。
可知机构承载力取决于三个要素——FN、μ和γ,其中FN≤40kN,μ取值范围为0.1~0.4,γ的大小关联辅助支撑臂和柱塞杆的伸出长度,影响推靠支撑机构的最大结构承载力。那么,FN取40 kN时,可以得出机构承载力与支撑角度、摩擦系数的关系,如表1所示。
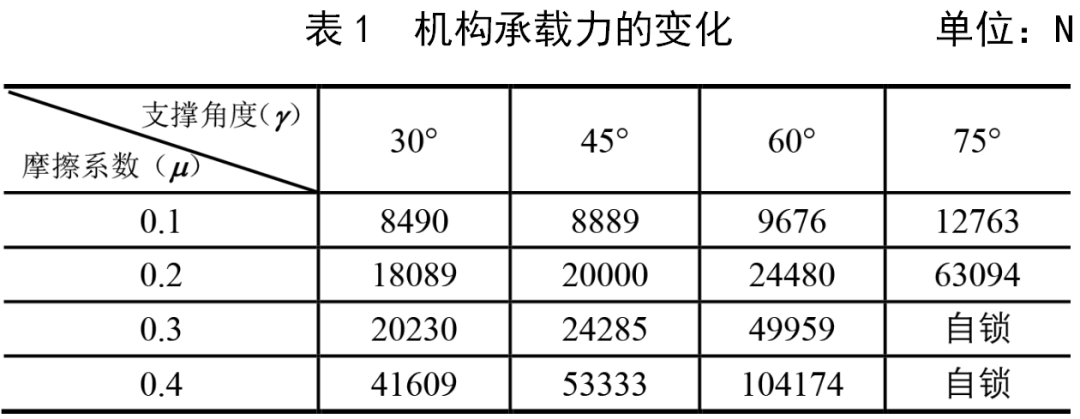
当γ为75°、摩擦系数较大时,机构承载力通过辅助支撑臂施加在支撑板的摩擦角内,支撑机构形成自锁,无论多大的力均无法使支撑板相对井壁滑动。实际运行中需避免机构自锁且提供较大牵引力,γ在45°~60°时,在地下钻进的封闭空间内,支撑板与井壁摩擦系数大于0.2,则两对推靠支撑结构的牵引力将大于40 kN,前/后推靠支撑机构也将提供超过40 kN的钻压。
2.2液压缸缸壁厚度δ分析
液压缸主要部件包括缸盖、柱塞杆和缸体。机器人外径为170 mm,其内置的岩屑管道直径为25 mm,设计的液压缸缸体内径D=40mm,柱塞杆杆径d=0.7D,柱塞杆总长为140 mm,缸体材料为42CrMo合金。根据表2所示的缸体材料力学性能,柱塞杆推出力FN=40 kN时,缸内压强约为32 MPa,为中高压系统,同等压强下柱塞收缩力约为20 kN。
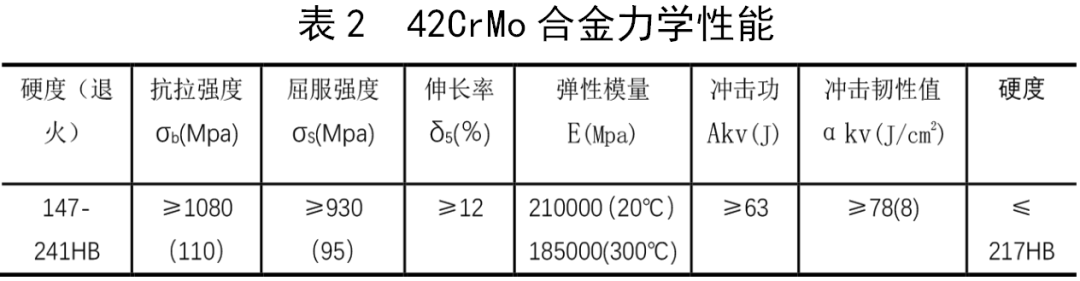
对于中高压系统,或者D/δ<3.2,液压缸的缸筒厚度按照厚壁筒计算。综合塑性材料和脆性材料的许用应力计算,分别采用第四和第二强度理论,得到液压缸缸壁厚度δ≥4.17 mm,符合32 MPa的压强要求。
2.3柱塞杆活塞密封分析
柱塞杆上的活塞厚度一般为其活塞直径的0.6~1.0倍,活塞处外径为40mm,为了增大行程,取活塞厚度≥24mm,拟定选取h=30 mm。同时进行薄弱点以及安全系数分析,避免活塞密封失效,其中活塞处的等效应力分析如图10所示。
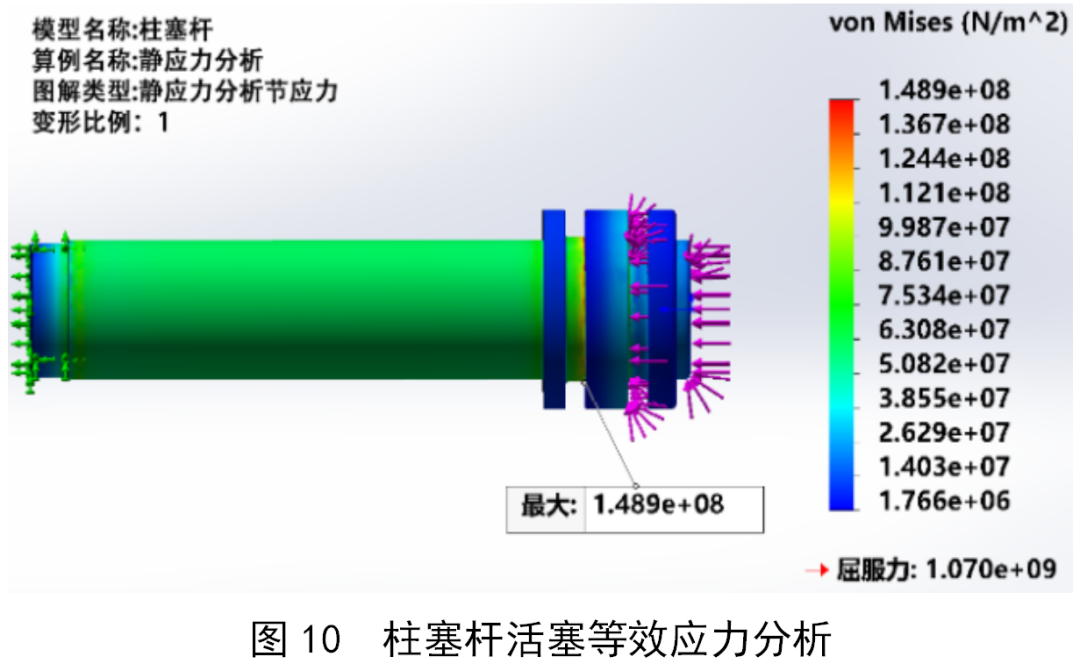
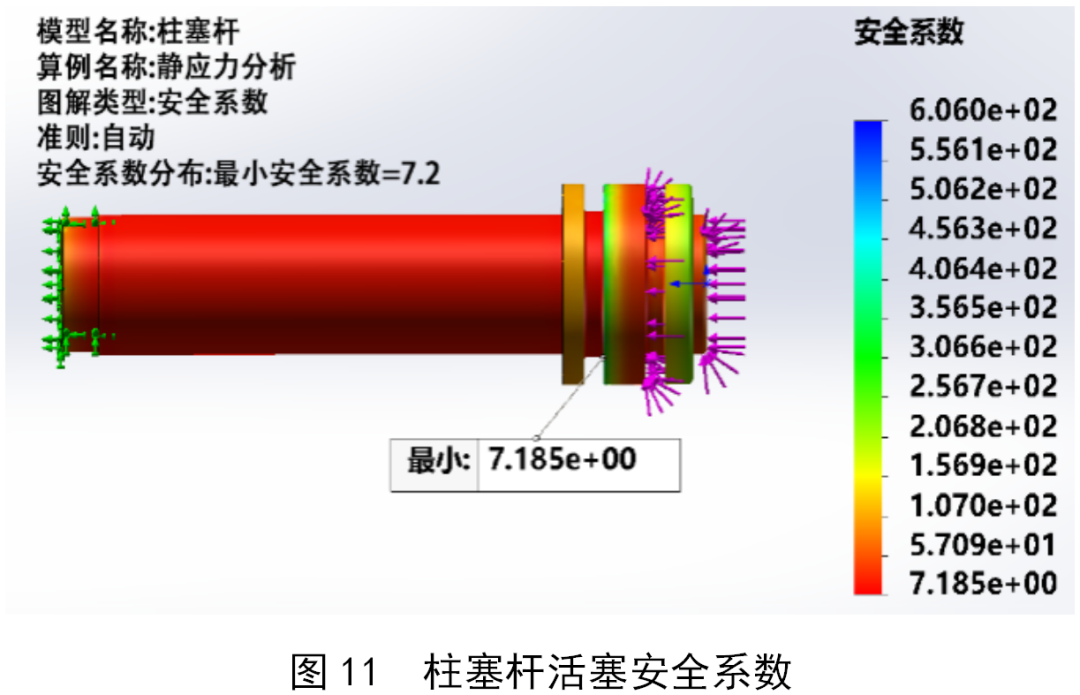
选用与42CrMo合金相近屈服强度的材料,并通过夹具顾问模拟固定柱塞,通过外部载荷顾问输入轴向力总数为40 kN,划分网格并进行运算。得到最大等效应力为1.489×108 N/m2,小于屈服力(1.07×109N/m2),安全系数如图11所示,薄弱点为7.185,远大于安全系数标准,柱塞杆活塞强度满足设计要求。
柱塞杆活塞的受力变形位移分析如图12所示,可见柱塞主要受力部位径向的变形位移量为2.461×10-3mm,两侧膨胀位移最大约为0.005 mm,在柱塞杆加工及密封圈配合误差的范围内。
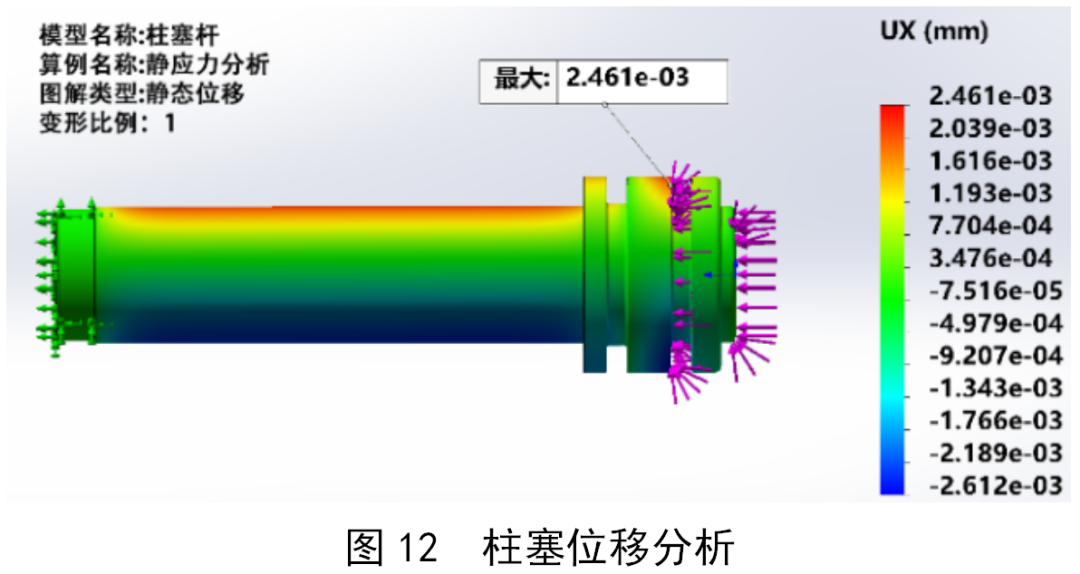
综合活塞的等效应力和位移分析,可知柱塞杆活塞高压密封稳定。
2.4柱塞杆杆径d校核分析
柱塞杆是液压缸传递力的主要零件,其杆径一般为活塞直径的0.7D,即d=28 mm。
(1)根据强度要求来计算柱塞杆杆径d。柱塞杆在稳定状态下要满足:

式中:F为柱塞杆受到的作用力(与推力一致)(N);[σ]为柱塞杆材料的许用应力(MPa)。
根据F=FN=40kN,[σ]=σb/n,求得d≥15.35mm,d=28 mm符合条件。
(2)根据保证柱塞杆不产生纵向弯曲要求计算,即柱塞杆临界载荷要比实际承受载荷大3.5~6(安全系数)倍。
参照非等截面法查形状系数表,得极限载荷Fk≈575171.9N,Fk/F=575 171.9/40000≈14.38,远大于安全系数,柱塞杆可保持稳定。
3 推靠支撑机构样机
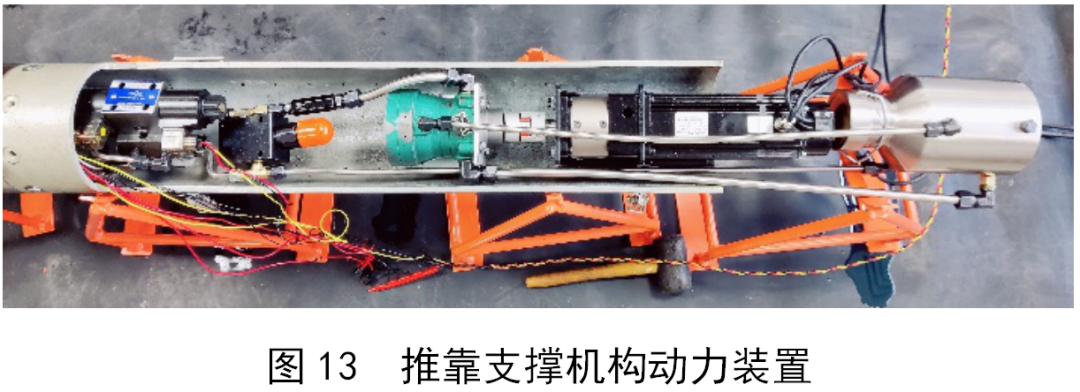
推靠支撑机构动力装置如图13所示,伺服电机为80法兰1 kW直流,扭矩为3 N·m,减速机减速比为3,降速增扭达9 N·m;1.25MCY14-1B的轴向柱塞泵压力为31.5 MPa,最高转速1 500 r/min;6 mm通径的单向阀,40 MPa可调溢流阀以及O型三位四通电磁阀;输油管道为8~12 mm无缝钢管,接头为卡套式接头。
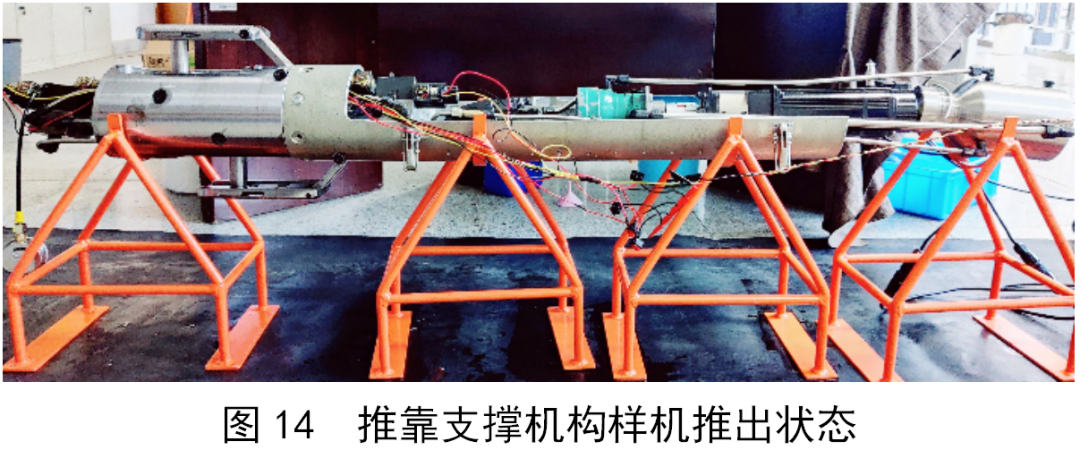
样机采用了一对推靠支撑进行试制,试制材料为45号钢(抗拉强度600 MPa、屈服强度355 MPa),总长度约为1.7 m,其推出状态如图14所示。运行状态能够实现单独伸缩以及同时伸缩,最大伸出推靠直径为300 mm,单个缸体伸出最大距离约为65 mm,单个伸缩时间可控制在15 s以内,输油管道中溢流阀在30 MPa及以内可稳定溢流。
4 结语
(1)本文提出了一种液压缸径向布置的井下无钻机钻探机器人推靠支撑机构,采用双作用液压缸简化推靠支撑结构的伸缩控制,通过正压力提高支撑板与井壁摩擦力的方式提供足够的牵引力。
(2)建立径向布局的液压支撑十字交错结构,各液压缸独立控制,能够有效调整机器人径向偏置和轴向姿态导向。
(3)对推靠支撑结构进行应力分析,验证了设计结构的可行性和稳定性,可提供足够的牵引力和钻压。
审核编辑:汤梓红
-
控制系统
+关注
关注
41文章
5964浏览量
108713 -
机器人
+关注
关注
206文章
27043浏览量
201418 -
伺服电机
+关注
关注
82文章
1838浏览量
56289
原文标题:无钻机钻探机器人推靠支撑机构设计与分析
文章出处:【微信号:机电信息杂志,微信公众号:机电信息杂志】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论