 全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现连续轨迹加工
全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现连续轨迹加工

今天,正运动小助手给大家分享一下全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现连续轨迹加工。
01功能简介
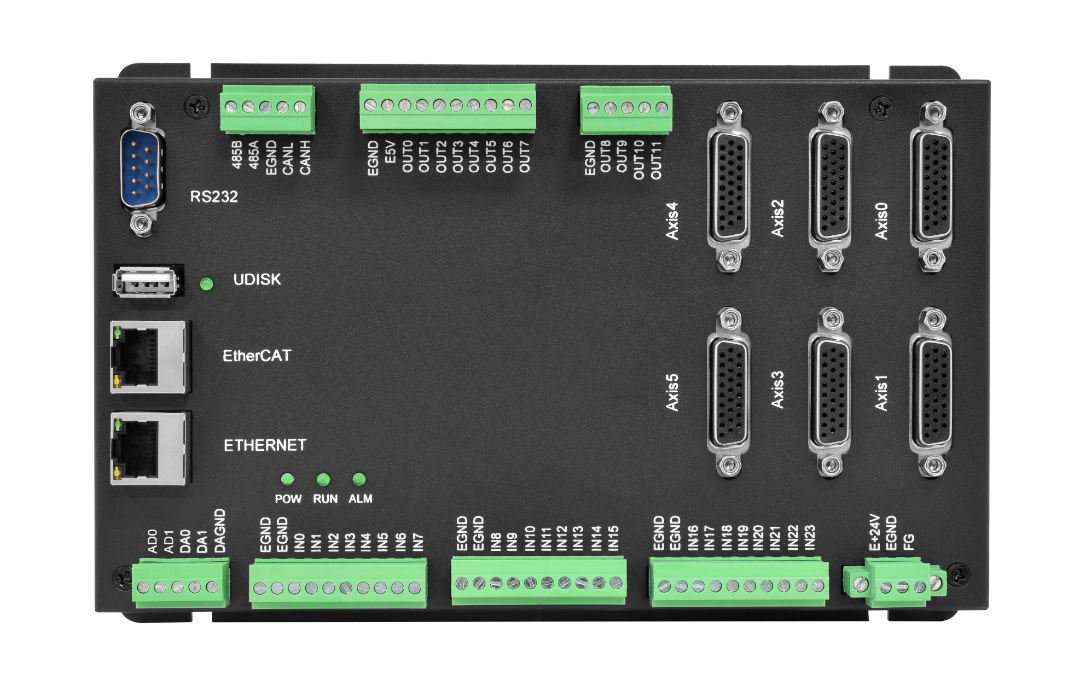
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程HMI功能,能提供网络组态显示,可实时监控和调整参数配置。
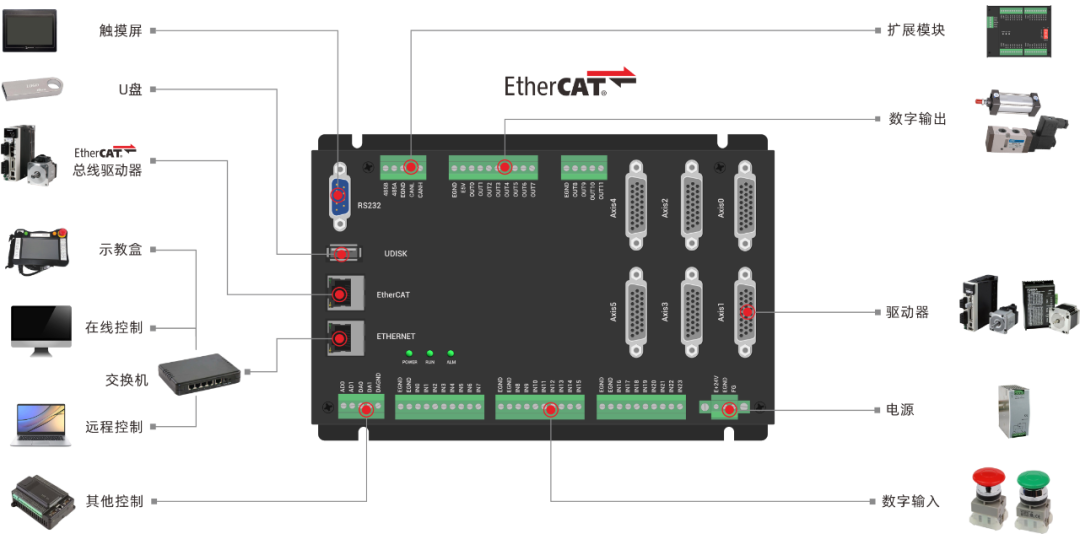
ZMC432H具备丰富的硬件接口和控制功能模块,能实现高效稳定的运动控制和实时数据采集,以满足工业控制协同工业互联网的应用需求。
ZMC432H内置了Linux系统,可以使用本地的LOCAL接口进行连接,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间为40us左右。

02Python+QT进行运动控制开发
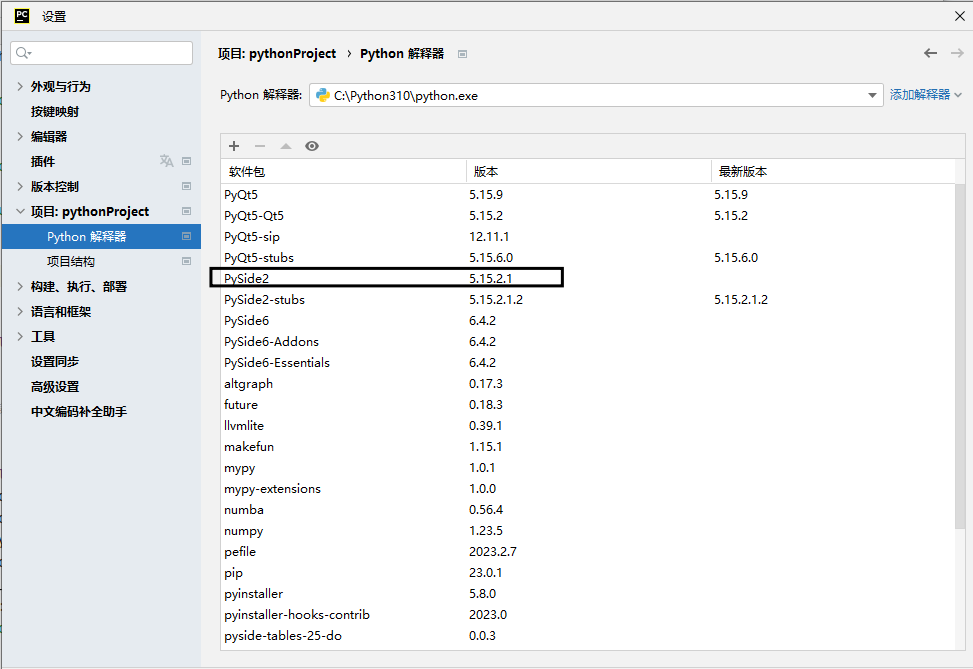
一.配置好python+Qt开发环境,以及安装好所需工具 1、下载python解释器。 2、安装pyside2或者pyside6根据python解释器的版本来选择,高版本的解释器使用pyside6。
安装pyside2有以下两种方式:
方式一:使用win+r打开运行界面,然后输入cmd(在安装python解释器的时候要根据安装向导配置好环境变量,否则后面的指令不会执行成功),pipinstall pyside2 -ihttps://pypi.douban.com/simple/; 方式二:在pycharm中安装。
3、安装好PyCharm Community Edition,在如下界面点击+号,安装所需的工具,如pyside2。
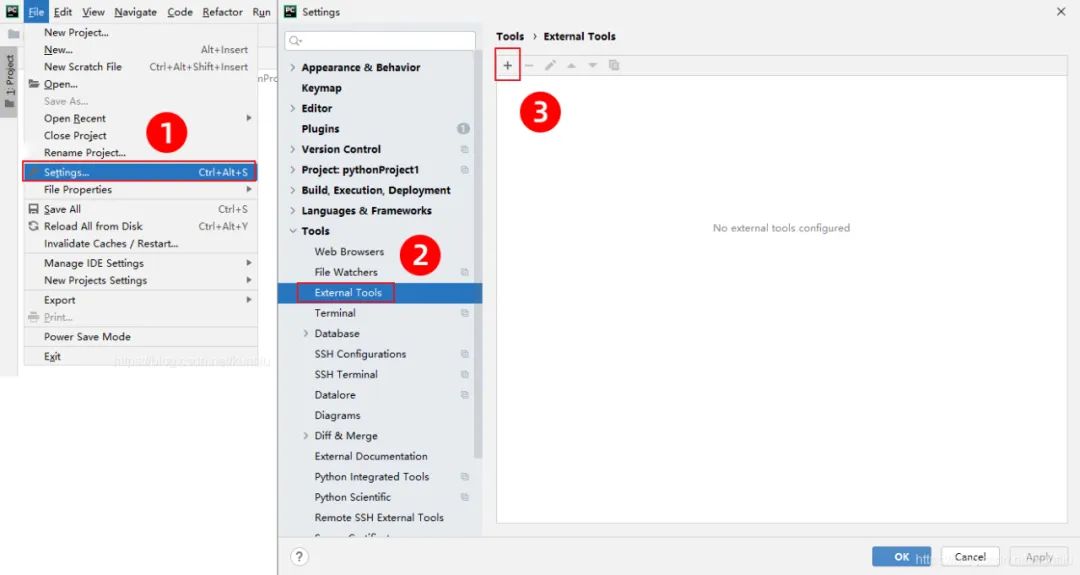
4、在Pycharm中配置自定义工具(用于qt的界面编辑)。
(1)按照如图步骤打开Tool的编辑框。
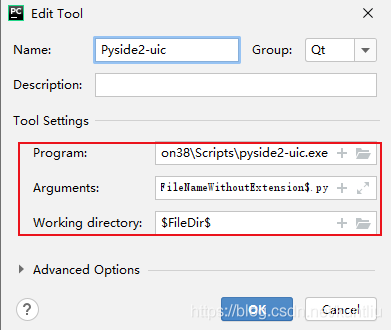
(2)自定义Pyside2-uic:
a.Program填写:Python安装目录 Scriptspyside2-uic.exe;
b.Arguments填写:$FileName$ -o $FileNameWithoutExtension$.py;
c.Working directory填写:$FileDir$。
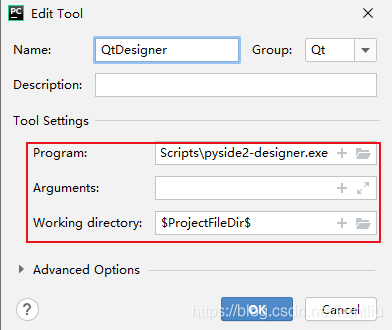
 (3)自定义QtDesigner:
(3)自定义QtDesigner:
a.Program填写:Python安装目录 Scriptspyside2-designer.exe;
b.Working directory填写:$ProjectFileDir$。
 将自定义工具配置好之后就可以直接在PyCharm的菜单中直接使用了。
将自定义工具配置好之后就可以直接在PyCharm的菜单中直接使用了。
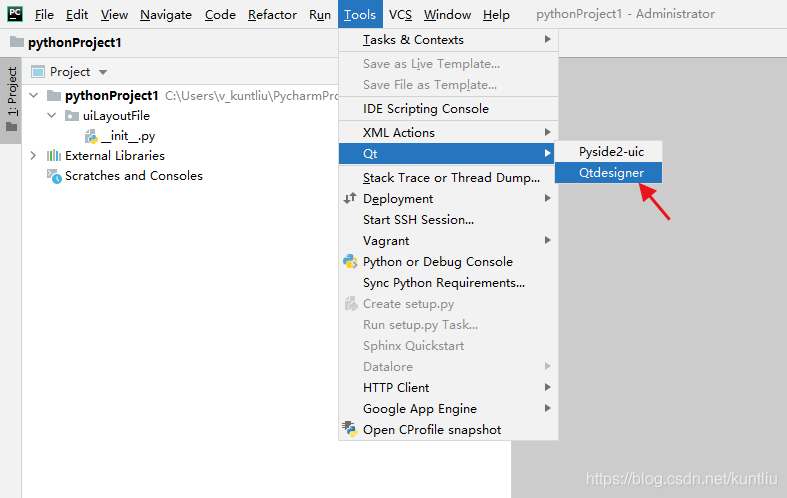
1、点击Tools → Qt → Qtdesigner即可进入UI的设计界面。
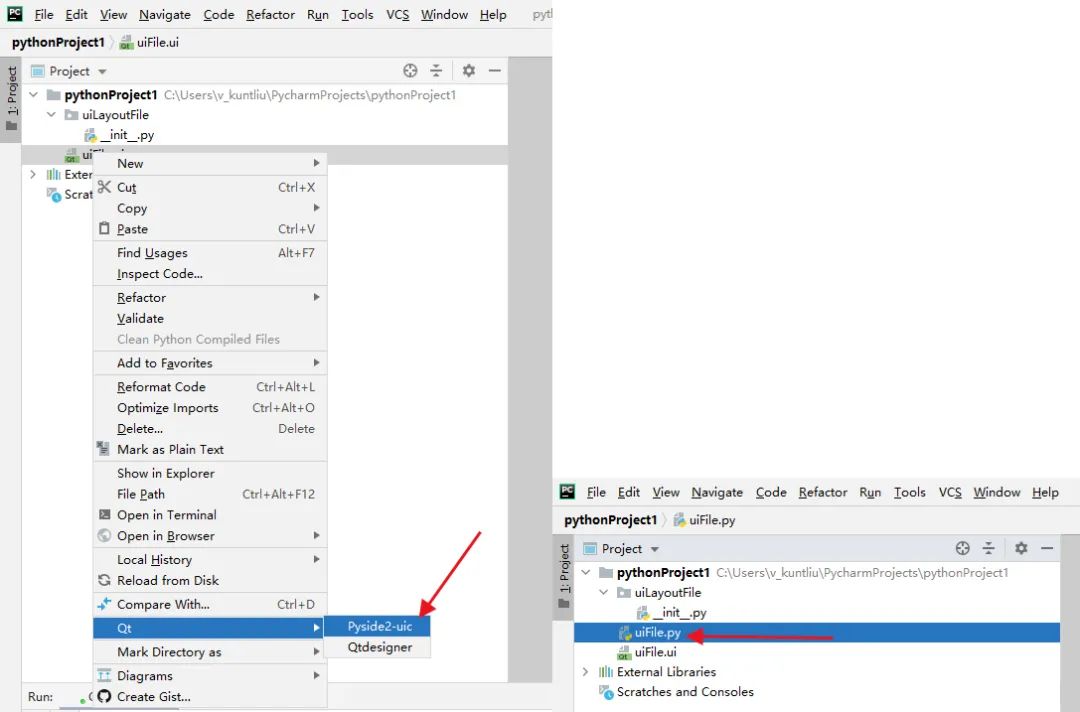
 2、右键ui文件,点击Qt → Pyside2-uic即可生成ui文件的py文件。
2、右键ui文件,点击Qt → Pyside2-uic即可生成ui文件的py文件。
二.新建Python项目并添加函数库
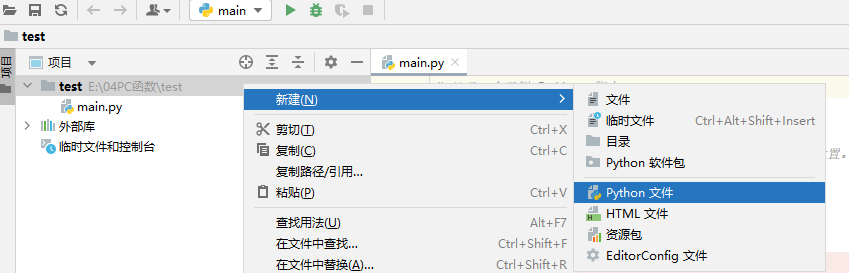
1、使用PyCharm Community Edition 2022打开一个新建的文件夹或者在进入PyCharm Community Edition 2022之后新建一个目录,并在目录中添加Python文件。
2、找到找到厂家提供的光盘资料,路径如下。
A.进入厂商提供的光盘资料找到“04.PC函数”文件夹,并点击进入。

B.选择“PC函数库V2.1.1”文件夹。

C.选择“Windows平台”文件夹。
D.选择“库文件与例程”文件夹。
E.选择“PYTHON例程”文件夹。
F.解压对应位数的压缩包。
G.解压后如下图所示。
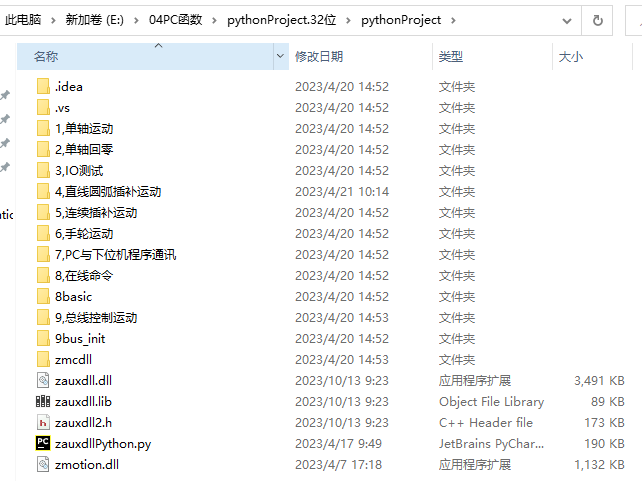
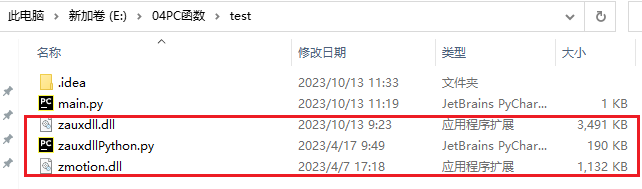
3、对于Windows系统来说将zauxdll.dll、zmotion.dll以及zauxdllPython.Py文件加入所创建的文件夹内即可。
三.查看PC函数手册,熟悉相关函数接口。
1、PC函数手册也在光盘资料里面,具体路径如下:“光盘资料�4.PC函数MotionPC函数库编程手册及其例程源码MotionPC函数库编程手册 V2.1.1.pdf”。

2、链接控制器,获取链接句柄。
(1)ZAux_OpenEth()接口说明。
| 指令7 | ZAux_OpenEth |
| 指令原型 | int32 __stdcall ZAux_OpenEth(char *ipaddr, ZMC_HANDLE * phandle) |
| 指令说明 | 以太网链接控制器。 |
| 输入参数 | 输入参数1个,详细见下面说明。 |
| ipaddr | 链接的IP地址。 |
| 输出参数 | 输出参数1个,详细见下面说明。 |
| Phandle | 返回的链接句柄。 |
| 返回值 | 详细见错误码说明。 |
(2)下载“.bas”文件到控制器中运行的接口说明。
| 指令12 | ZAux_BasDown |
| 指令原型 | int32 __stdcall ZAux_BasDown(ZMC_HANDLE handle,const char *Filename,uint32 run_mode ) |
| 指令说明 | 单个bas文件生成ZAR并且下载到控制器运行 |
| 输入参数 | 共有3个输入参数,见下方说明。 |
| handle | 链接句柄。 |
| Filename | BAS文件名带路径。 |
| run_mode | 下载模式0-RAM 1-ROM。 |
(3)暂停和恢复控制器内部Basic程序的接口说明。
| 指令10 | ZAux_Pause |
| 指令原型 | int32 __stdcall ZAux_Pause(ZMC_HANDLE handle) |
| 指令说明 | 暂停控制器内部运行的Basic程序。 |
| 输入参数 | 输入参数1个,见下方说明。 |
| handle | 链接句柄。 |
| 指令11 | ZAux_Resume |
| 指令原型 | int32 __stdcall ZAux_Resume(ZMC_HANDLE handle) |
| 指令说明 | 继续控制器内部运行的Basic程序。 |
| 输入参数 | 输入参数1个,见下方说明。 |
四.RtBasic文件下载与连续轨迹加工的Python+Qt开发例程。
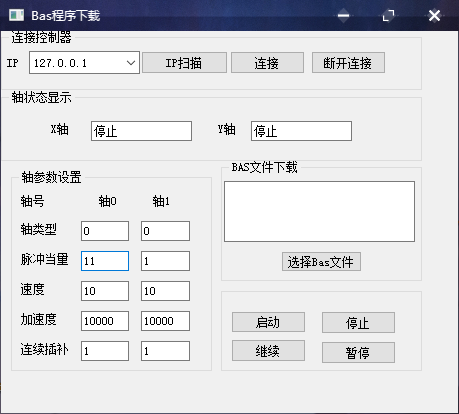
1、例程界面如下。
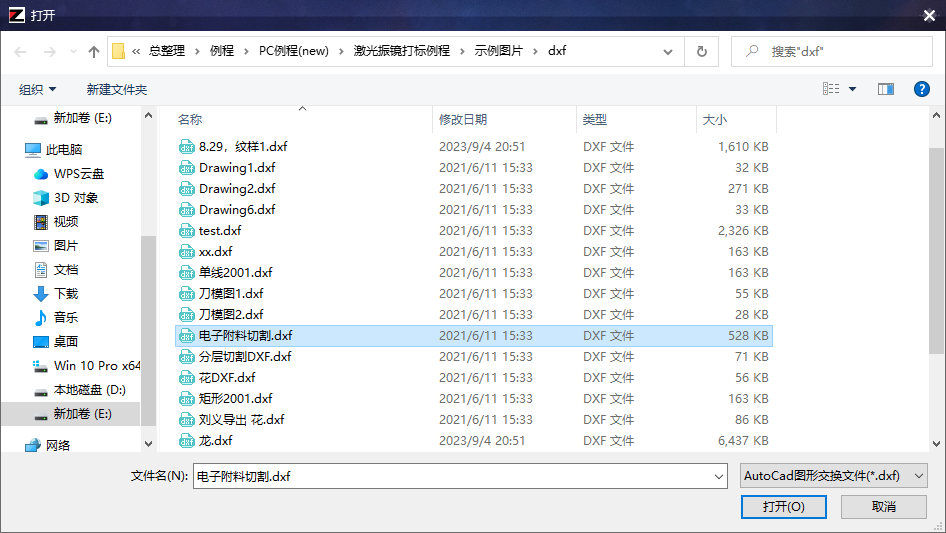
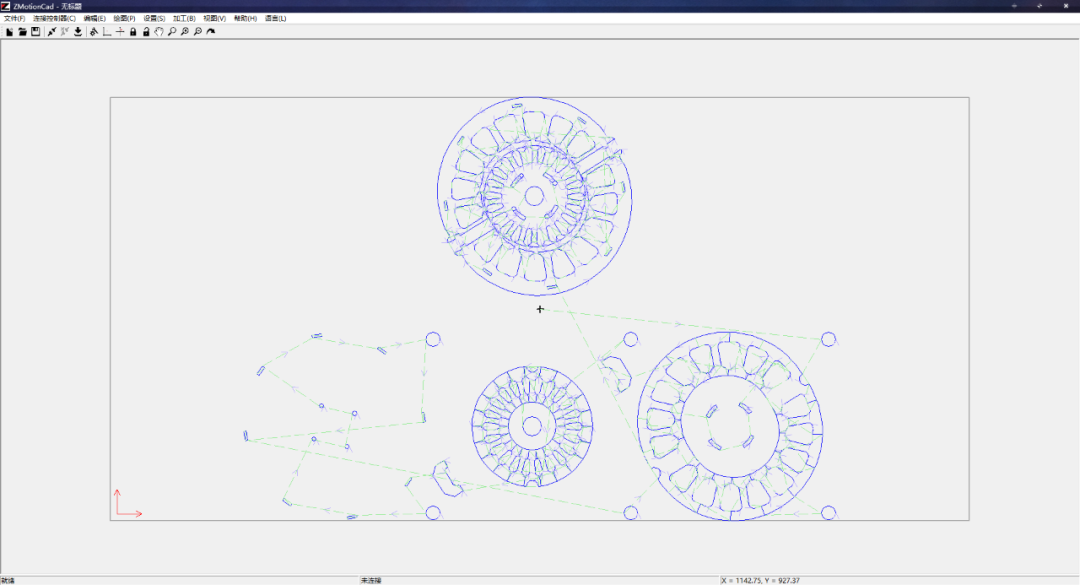
2、通过“光盘资料”→“工具软件”里面的“ZmotionCadV1.0导图工具”将CAD图纸里面的图形转换成“.bas”的运动控制代码。
A.打开该工具软件,点击“文件”→“导入”。选择需要转换的dxf格式的CAD图纸并打开。
B.打开后效果如下。
C.点击“文件”→“导出”,导出“.bas”文件。到时候可下载到控制卡里面进行以上轨迹的运动控制。
D.CAD导图软件的具体使用方法参考往期文章正运动技术CAD导图软件配合控制器的使用方法。
3、程序示例如下。 (1)Python中加载qt的UI文件;
from PySide2.QtWidgets import QMessageBox
from PySide2.QtCore import QFile, QTimer
from PySide2.QtUiTools import QUiLoader
q_state_file = QFile("mainweiget.ui")
q_state_file.open(QFile.ReadOnly)
self.ui = QUiLoader().load(q_state_file)
q_state_file.close()
注:此时self.ui表示了qt中的ui。
(2)链接按钮的事件处理函数中调用链接控制器的接口函数ZAux_OpenEth(),与控制器进行链接,链接成功后启动定时器1监控控制器状态。
def on_btn_open_clicked(self):
strtemp = self.ui.comboBox.currentText()
print("当前的ip是:", strtemp)
if self.Zmc.handle.value is not None:
self.Zmc.close()
self.time1.stop()
self.ui.setWindowTitle("单轴回零")
iresult = self.Zmc.open_eth(strtemp)
if 0 != iresult:
QMessageBox.warning(self.ui, "提示", "连接失败")
else:
QMessageBox.warning(self.ui, "提示", "连接成功")
str_title = self.ui.windowTitle() + strtemp
self.ui.setWindowTitle(str_title)
self.Up_State()
self.time1.start(100)
(3)通过定时器监控控制器状态。
def Up_State(self):
idlelist = [ctypes.c_int(-1) for i in range(0, 4)]
fdposlist = [ctypes.c_float(0) for i in range(0, 4)]
for i in range(0, 4):
self.Zmc.get_target_pos(i, fdposlist[i]) # 获取当前轴位置
self.Zmc.get_idle(i,idlelist[i])#判断当前轴状态
str1 = " {} {} ".format("停止中" if idlelist[0].value else "运行中", round(fdposlist[0].value, 2))
self.ui.lineEdit_X.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[1].value else "运行中", round(fdposlist[1].value, 2))
self.ui.lineEdit_Y.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[2].value else "运行中", round(fdposlist[2].value, 2))
self.ui.lineEdit_Z.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[3].value else "运行中", round(fdposlist[3].value, 2))
self.ui.lineEdit_R.setText(str1)
(4)通过“选择bas文件”按钮的事件处理函数选择对应的bas文件。
def on_btn_DownBas_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "提示", "未连接控制器")
return
file_Date = QFileDialog.getOpenFileName(self.ui, "选择BAS文件", "..", "Files(*.bas)")
self.file_Name = file_Date[0].replace("/", "")
print(self.file_Name)
if self.file_Name == "":
return
self.ui.textEdit_FilePath.insertPlainText(self.file_Name + "
")
(5)通过“启动”按钮的事件处理函数来下载和启动选择的bas文件。
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "警告", "未连接控制器")
return
# 设定轴0轴类型
str_tmp = self.ui.edit_Atype_0.text()
float_tmp = int(str_tmp)
self.Zmc.set_axis_type(0, float_tmp)
# 设定轴0轴类型
str_tmp = self.ui.edit_Atype_1.text()
float_tmp = int(str_tmp)
self.Zmc.set_axis_type(1, float_tmp)
# 设定脉冲模式及逻辑方向(脉冲 + 方向)
self.Zmc.set_invert_step(self.axis_Num, 0)
# 设置当量
str_tmp = self.ui.edit_Units_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(0, float_tmp)
str_tmp = self.ui.edit_Units_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(1, float_tmp)
# 设置速度
str_tmp = self.ui.edit_Speed_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(0, float_tmp)
str_tmp = self.ui.edit_Speed_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(1, float_tmp)
# 设置加速度
str_tmp = self.ui.edit_Accel_0.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(0, float_tmp)
str_tmp = self.ui.edit_Accel_1.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(1, float_tmp)
# 设置减速度
self.Zmc.set_deceleration(0, 0)
self.Zmc.set_deceleration(1, 0)
#开启连续插补
str_tmp = self.ui.edit_Merge_0.text()
float_tmp = int(str_tmp)
self.Zmc.set_merge(0,float_tmp)
str_tmp = self.ui.edit_Merge_1.text()
float_tmp = int(str_tmp)
self.Zmc.set_merge(1, float_tmp)
ifself.file_Name=="":
return
ret = self.Zmc.bas_down(self.file_Name, 1) # 下载到ROM 运行
if ret != 0:
QMessageBox.warning(self.ui, "提示", "文件下载失败!" + "错误码为 :{} ".format(ret))
return
注:“.bas”文件也可以通过我们的ZDevelop软件下载。ZAux_BasDown指令会将单个bas文件生成ZAR并且下载到控制器运行。 (6)通过停止、暂停、继续按钮的事件处理函数来实现控制器。
def on_btn_stop_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "警告", "未连接控制器")
return
buffer=(ctypes.c_char*1024)()
ret = self.Zmc.execute("STOPTASK 0", buffer, 0)
ret = self.Zmc.rapid_stop(2)
def on_btn_Pause_clicked(self):
ret = self.Zmc.bas_pause()
if ret != 0:
QMessageBox.warning(self.ui, "提示", "运动暂停失败!" + "错误码为 :{} ".format(ret))
return
def on_btn_Resume_clicked(self):
ret = self.Zmc.bas_resume()
if ret != 0:
QMessageBox.warning(self.ui, "提示", "运动恢复失败!" + "错误码为 :{} ".format(ret))
return
03
调试与监控
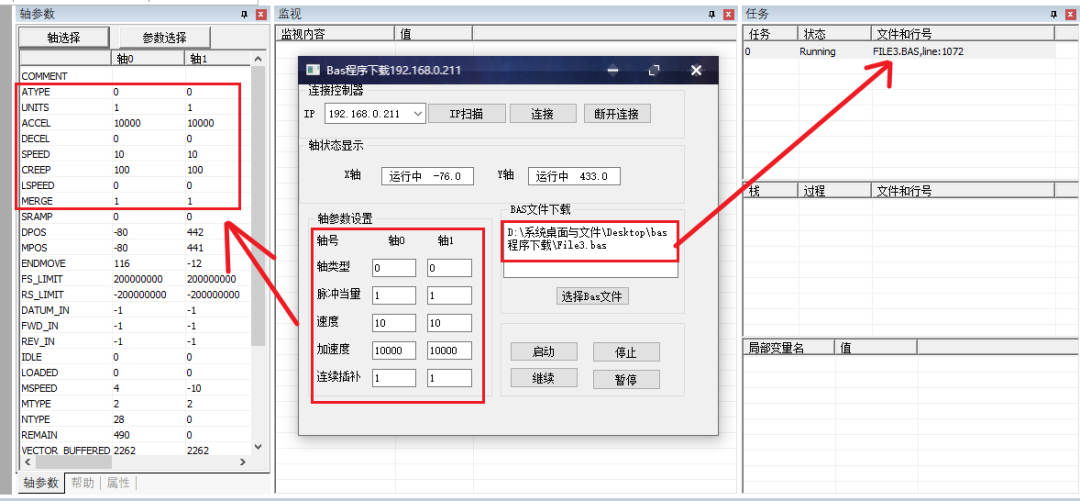
编译运行例程,同时通过ZDevelop软件连接控制器对控制器状态进行监控。
ZDevelop软件连接控制器打开调试模式可以查看控制器里面的“.bas”文件的文件名。
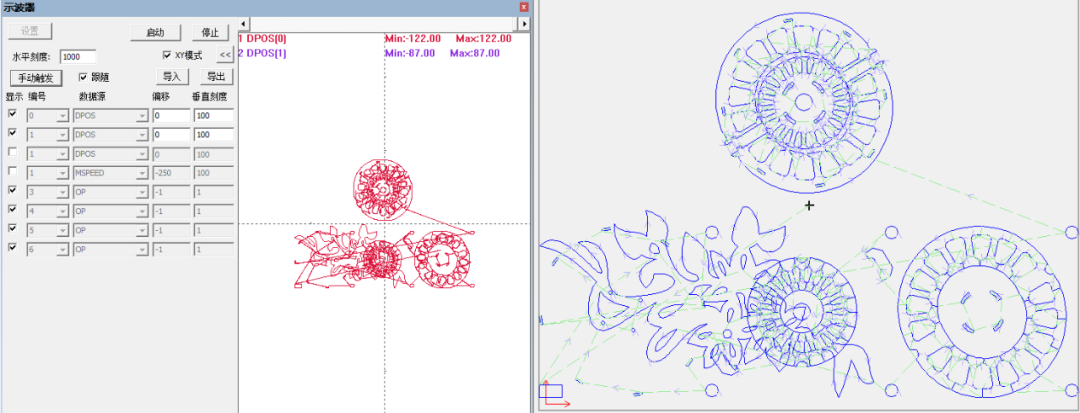
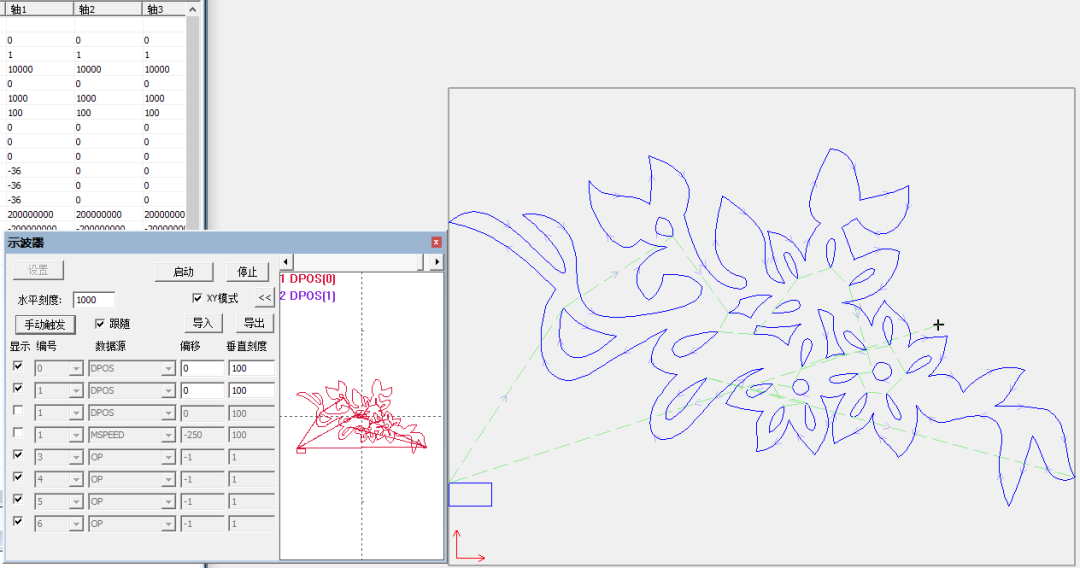
通过ZDevelop软件的示波器功能对连续小线段的波形进行抓取,下面是示波器波形和CAD图纸的比较。
比较如下图所示。
例程讲解视频。
本次,正运动技术全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+QT开发,就分享到这里。
-
控制器
+关注
关注
114文章
17638浏览量
190172 -
总线
+关注
关注
10文章
3014浏览量
91287 -
运动控制
+关注
关注
5文章
792浏览量
34252 -
python
+关注
关注
57文章
4856浏览量
89548 -
ethercat
+关注
关注
19文章
1373浏览量
43285
原文标题:全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发
文章出处:【微信号:伺服与运动控制,微信公众号:伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录


【正运动】全国产EtherCAT运动控制器 | ZMC432H
脉冲+总线运动控制器ZMC432H用户手册

EtherCAT运动控制边缘控制器ZMC432H接口与功能解析



全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发


全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发






 工商网监
工商网监
评论