 基于S7-1200 PLC的步进电机位置控制系统设计
基于S7-1200 PLC的步进电机位置控制系统设计
摘 要:
基于步进电机驱动原理,对步进电机驱动方式进行分析,提出了基于西门子S7-1200系列PLC的步进电机位置控制装置的电气系统硬件接线及软件设计。通过测试,该装置能对位置进行精确控制及状态监控,在光伏发电追光系统中可用于光伏板的控制,也适用于PLC运动控制教学实训,在自动化装置中有较好的推广价值。
0引言
步进电机作为一种执行元件,广泛应用于工业控制过程。其工作原理是将电脉冲信号转换为相应的角位移或线位移[1],从而达到精确定位和转速控制的目的。步进电机的转动角度与输入脉冲的个数成正比,输入脉冲个数越多,角位移量越大;其转动速度由脉冲信号频率决定,脉冲频率越高,转速越快。PLC作为一种专为工业环境设计的数字运算操作的电子装置,通过控制其输出端口产生的高速脉冲个数及频率,对步进电机位置或速度进行精确控制,在工业自动化生产中的应用日益广泛。
SIMATIC S7-1200系列可编程控制器是西门子公司推出的新一代PLC,采用模块化设计,扩展灵活[2],集成了强大的运动控制功能,能实现对步进电机的灵活配置及精确控制,其便捷的网络通信功能,能实现人机交互,便于使用人员操作及远程监控。
1步进电机控制原理
1.1 步进电机转速控制
步进电机的定子绕组每改变一次通电状态,转子转过的角度称“步距角”。步距角θs由式(1)表示。

式中:m为定子相数;Z为转子齿数;C为通电方式。
当C=1时,单相轮流通电或双相轮流通电;当C=2时,单双相轮流通电。
由式(1)可以看出,步距角与定子相数、转子齿数及通电方式成反比。定子相数、转子齿数及通电方式的节拍数越多,则步距角越小。
混合式步进电机结合了永磁式和反应式步进电机的优点,又分为两相、三相和五相[3],两相步距角一般为1.8°,三相步距角为0.9°,而五相步距角一般为0.72°。通过控制输入脉冲的数量可以准确确定输出的角位移以实现定位的功能[4]。
步进电机的转速由驱动脉冲频率控制,其转速与脉冲频率成正比,在细分驱动情况下,电机转速n/(r/min)由式(2)表示。
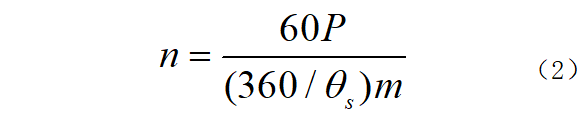
式中:P为脉冲频率(Hz);θs为步进电机步距角(°);m为细分数(整步为1,半步为2)。
由式(2)可看出,通过控制步进电机输入脉冲的频率可以准确控制输出的角速度从而达到调速的目的。本系统采用安川57HD3403两相标准型混合式步进电机,该步进电机额定电压24 V,额定电流3.0 A,额定转速0~1 000 r/min,4线制,步距角1.8°。无细分时,转动一圈需要200个脉冲(360°/1.8°=200)。步进电机采用整步,1细分时,如果输入脉冲频率为1 000 Hz,则电机转速为(60×1 000)/(360/1.8)×1=300 r/min。
1.2 细分工作原理
步进驱动器是一种给步进电机发送驱动信号的功率放大器。步进电机每旋转一个步距角,其绕组内部的电流将从零增大到额定值或者由额定值突降到零,表现为方波脉冲,一般通过恒流斩波的形式得到。电流的突变造成了电机转矩的冲击,另外方波电流中含有大量的高次谐波,这些都是步进电机产生振动和噪声的原因。为减小振动和噪声,一般通过对驱动电流进行细分来控制。
步进电机运行时,定子线圈通电产生磁场,转子受电磁力作用而移动。控制定子线圈电流的大小,可使线圈磁场强度线性改变,从而达到减小步进电机每一步旋转角度的目的,这就是细分的原理。和将绕组的额定电流全部接通或断开不同,电流细分是额定电流为阶梯式投入或切除。每次切换电流时,额定电流分N次投入或切除,每次上一个台阶或下一个台阶,转子转动N次才达到一个步距角,即为N细分。细分数越多,相电流越接近正弦曲线。
由于细分作用,步进电机完成一个固有步距角分成很多步,提高了步距均匀度,因此可以提高控制精度,使启动性能变好;同时电流阶梯式变化,降低了冲击,减小了转矩脉动,从而消除了低频振动,使运行性能变优。
1.3 步进驱动器
本文采用数字式两相步进驱动器DM542,其参数自动整定功能能在驱动不同电机时自动适配运行参数。脉冲信号控制端采用12 V或24 V供电时,可不串接电阻,简化了接线。
步进驱动器DM542输出8档相电流,由拨码开关SW1~SW3设定。安川57HD3403步进电机额定电流为3 A,业内认为该值为电流峰值,设置SW1、SW2、SW3分别为OFF、ON、OFF。
输出16档细分,最大细分数可达到25 000步数/转,由四个拨码开关SW5~SW8设定。一般认为当细分倍数大于4后,并不能提高电机定位精度,只是使电机转动更平稳。因此,将细分设置为1 600步数/转,拨码开关SW5、SW6、SW7、SW8设置为OFF、OFF、ON、ON。
1.4 脉冲接收方向控制
步进电机的运动方向由PUL和DIR控制,步进驱动器采用脉冲端接收脉冲的方式,方向端利用电平信号来控制步进电机的运动方向,如图1所示。
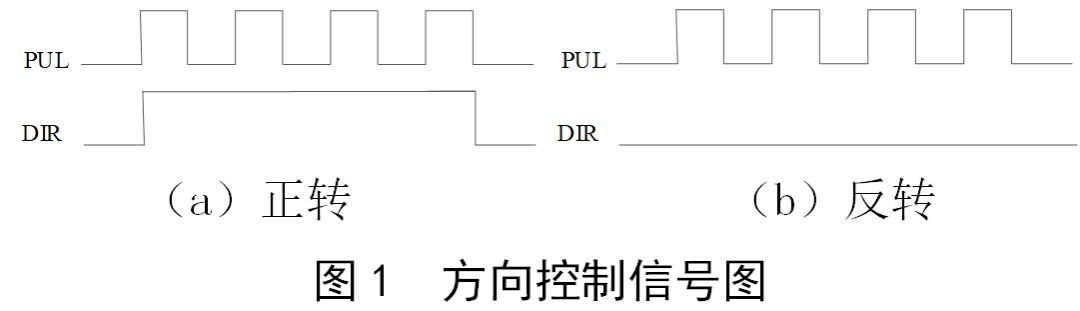
步进驱动器DM542通过方向控制端子DIR的ON和OFF控制器电平高低,达到控制步进电机运动方向的目的。PLC脉冲发送与接收的方向必须一致。在PLC编程中,运行距离数值为正时,步进电机向正方向运动,数值为负时,步进电机向负方向运动。
2步进电机控制系统简介
本文所论述的步进电机控制系统由触摸屏、西门子S7-1200 PLC、步进驱动器、步进电机、丝杠以及滑台组成,其系统结构如图2所示。
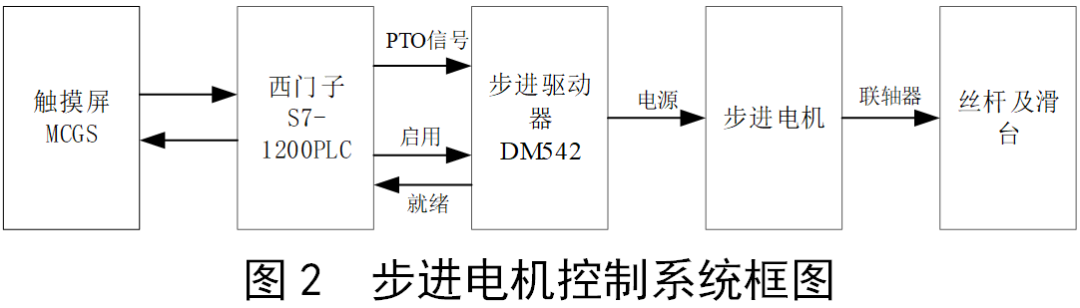
将MCGS触摸屏通过工业交换机与PLC通信,设计MCGS组态界面,编写PLC程序,从而实现步进电机的精确控制及监控。
利用触摸屏可以省去大量的接线,减少PLC I/O口的使用,减少资源占用。当触摸屏上的按钮被按下时,触摸屏会给PLC发送控制信号,如正反转点动、绝对定位等,PLC收到数据判断是否出错,如果没有出错,执行命令,通过高速脉冲输出端口向步进驱动器DM542发出高速PTO脉冲,从而驱动步进电机正反转、复位错误、回归原点、位置定位等动作。同时,PLC将动作过程及参数反馈给触摸屏,MCGS可以直观地显示滑台实时位置、运动速度、运动状态。
步进电机和丝杠采用联轴器直接连在一起,步进电机旋转一圈,滑台滑动4 mm的距离。步进电机的输出角位移与输入脉冲个数成正比,可以根据输入脉冲个数确定角位移的大小,PLC通过计算发出脉冲个数从而准确地计算出滑台所处的位置。该系统是一个开环控制系统,滑台位置的确定依靠步进电机准确动作来控制。
3Cessna 172飞机水平测量方法
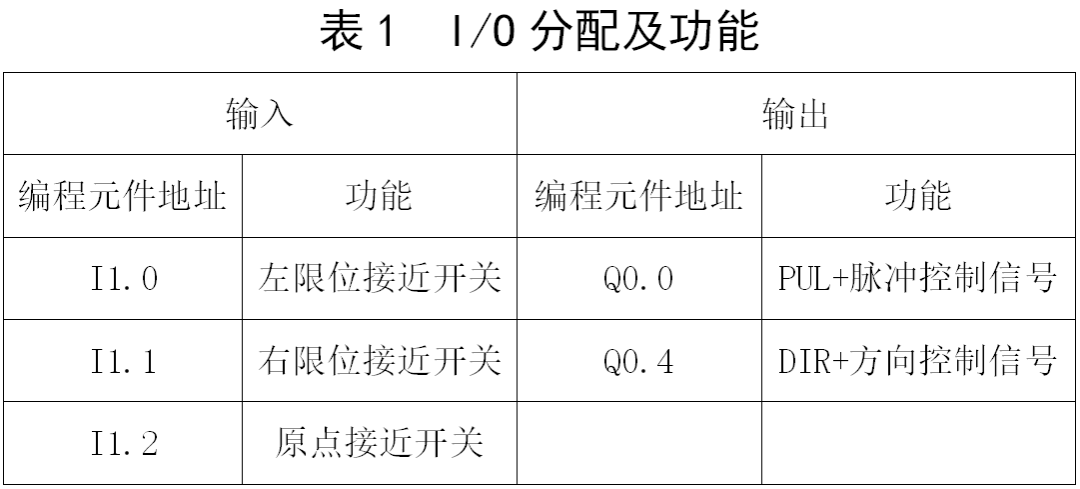
3.1 I/O分配及功能
I/O分配及功能如表1所示。
3.2 PLC接线图
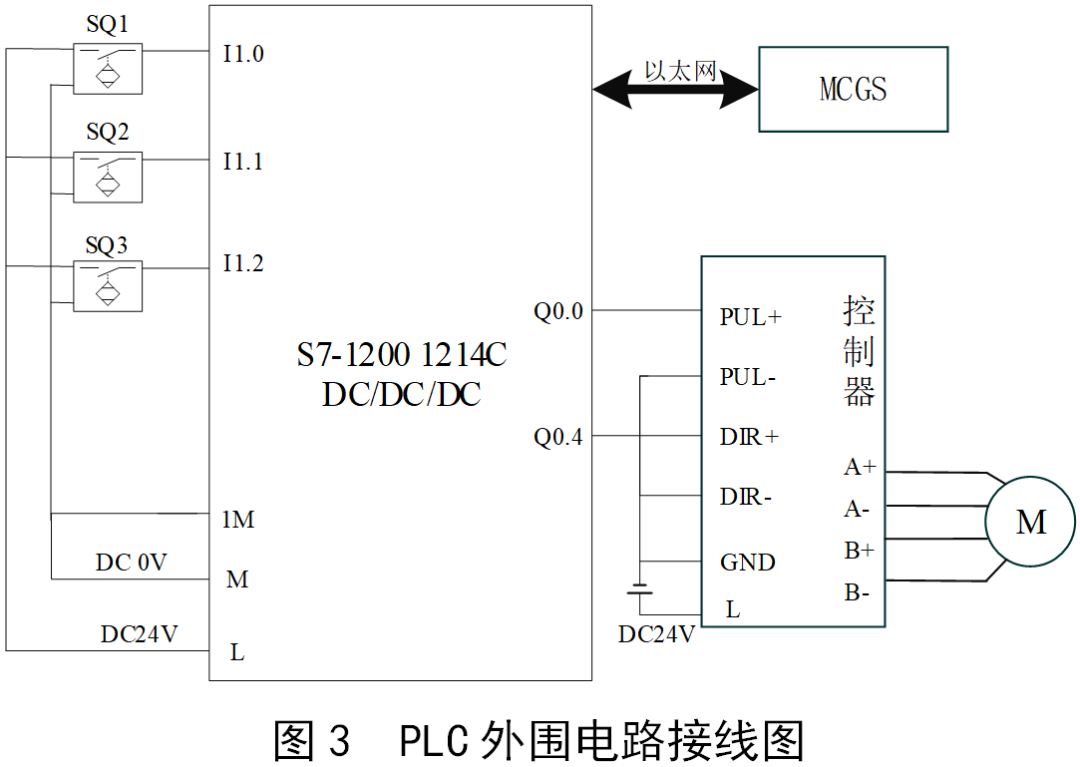
步进电机位置定位控制选用西门子S7-1200系列的CPU 1214 DC/DC/DC作为控制器。它有14个输入点、10个输出点,具有4个高速脉冲轴,其强大的运动控制功能为步进电机的位置定位、转速控制等提供了方便。PLC外围电路接线如图3所示。
3.3 运动轴组态
以步进电机控制要求为依据,需要利用博途软件中的工艺对象运动轴进行组态。在组态过程中,驱动器选择PTO模式,输入电机每转的脉冲数,由于步进电机每旋转一圈滑台前进或后退4 mm,组态测量单位为毫米;步进电机的控制脉冲由Q0.0输出,方向由Q0.4控制。滑台行程较小,必须进行限位,输入点1M必须接DC24 V电源负端,不然系统会误判在限位位置,导致无法启动轴。这里采用三线制限位开关进行左右限位,低电平有效,其控制端点接至I1.0、I1.1,当滑台触发I1.0或I1.1时,轴以急停减速度停止并显示出错信息,必须使用指令“MC_Reset”确认故障,重新启动工艺对象。步进电机原点归位对应I1.2,组态时必须勾选允许硬限位开关处自动反转。之后可以将程序下载到PLC,可以下载轴组态,但建议将整台设备的组态下载,操作如下:选中CPU后点击下载,等到下载完成可以选择调试—激活—启用。这样就可以尝试点动控制电机了。
4系统软件设计
4.1 组态界面设计
根据步进电机控制要求,设计步进电机位置控制系统组态界面如图4所示。
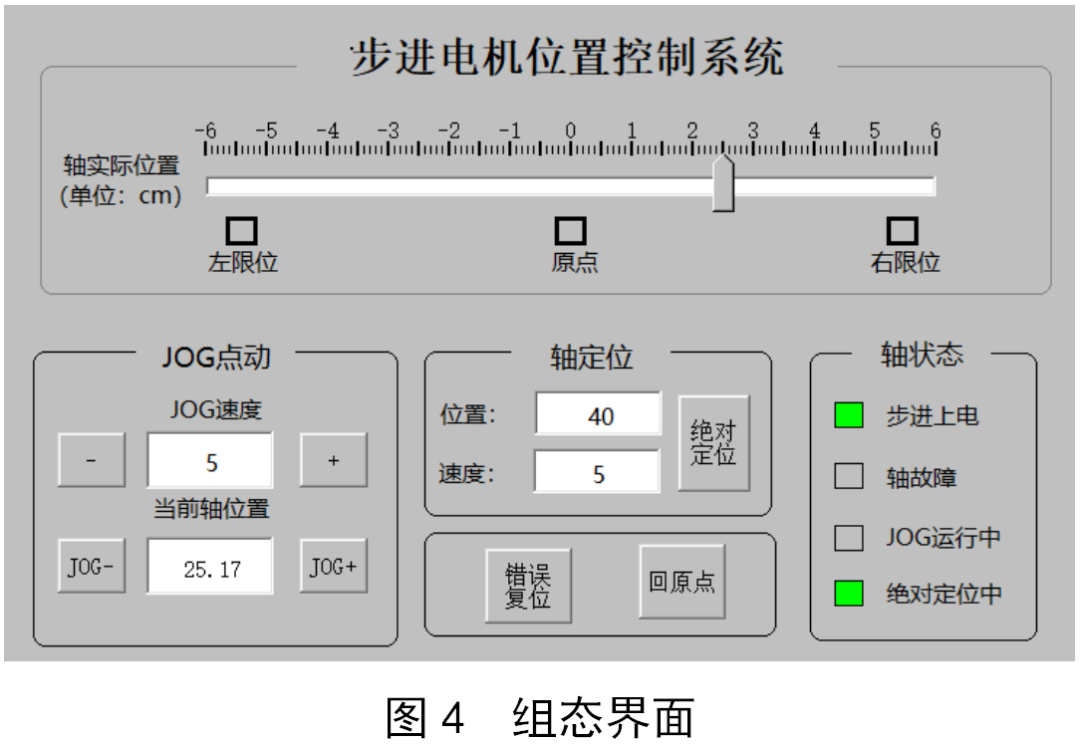
本设计思路是通过以太网通信协议,由上位机监测显示滑台位置,并根据要求随时提供控制信号。其主要功能参数有位置信息、JOG点动信息、轴定位、轴状态显示功能和复位操作。利用按钮控制步进电机的运行,输入框设置步进电机速度及位置,指示灯显示运行状态。具体如下:
(1)滑台实际位置:在现实的工业控制中,若实施远程监视控制,必须在人机界面上能显示滑台在轴上的实际位置信息,且需要提前设定左右限位的位置信息,为工作人员提供实时位置信息。
(2)实时数据处理:根据系统运行需要,可以实时监控位置状态外,还需要进行必要的操作,这里设计了JOG点动速度、当前轴位置信息设定并显示模块,通过4个参数设置窗口分别设置参数,可进行步进电机的正反转控制,轴定位位置信息和速度信息显示,可进行绝对定位。
(3)状态显示:状态显示主要指的是轴状态相关信息的显示,包括步进电机上电指示灯、轴故障指示灯、JOG运行状态显示和绝对定位中显示。这些指示灯可以直观地展示轴状态信息。
(4)复位功能:复位功能包括“错误复位”和“回原点”。
4.2 PLC程序流程
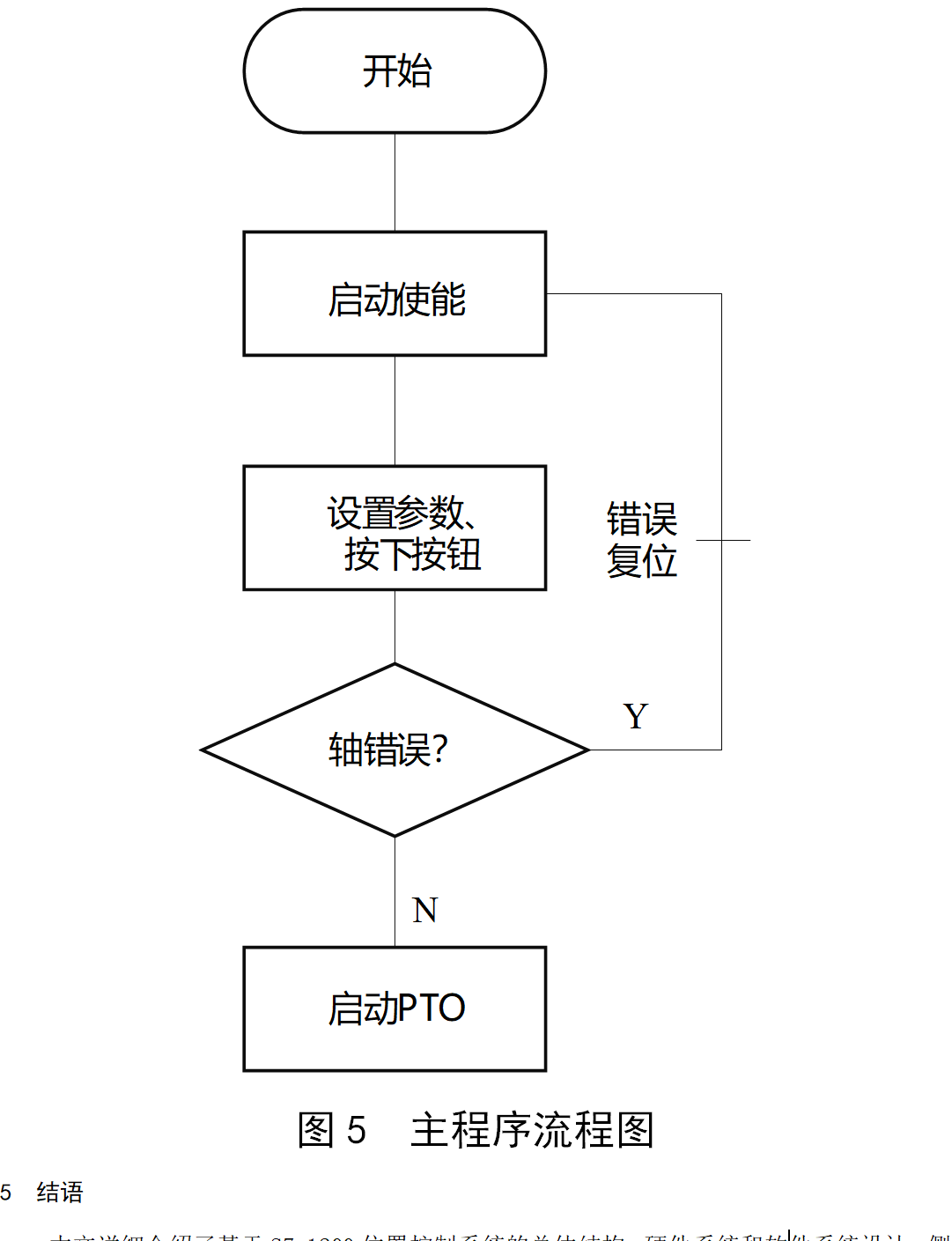
建立一个函数块,用来开启轴指令,主程序首先启动使能,在触摸屏设置参数、按下按钮,如无错误,启动PTO,触发步进电机工作;如有错误,则需按下“错误复位”按钮,重新启动使能。主程序流程图如图5所示。
5结语
本文详细介绍了基于S7-1200位置控制系统的总体结构、硬件系统和软件系统设计,侧重阐述了步进驱动器的驱动原理。在利用单轴控制步进电机的过程中,通过触摸屏设定步进电机的移动距离、运动速度及方向、错误复位等参数。在步进电机运行过程中,其工作状态同步显示在触摸屏上。实测证明,该系统具有运行可靠、高效的特点,系统定位准确、参数设置方便、状态显示同步。但步进电机作为位置控制用于开环控制系统,由于丢步或失步的原因,控制精度不够,如果要精确控制,需要采用步进电机和编码器配合,构成位置闭环控制系统或采用伺服控制系统,才能满足对精确定位的要求。
审核编辑:汤梓红
-
控制系统
+关注
关注
41文章
5963浏览量
108712 -
plc
+关注
关注
4975文章
12254浏览量
454912 -
步进电机
+关注
关注
149文章
2929浏览量
146066 -
位置控制
+关注
关注
0文章
20浏览量
9361 -
S7-1200
+关注
关注
11文章
328浏览量
17222
发布评论请先 登录
相关推荐








 工商网监
工商网监
评论