 基于长线列红外焦平面探测器冷箱组件开展焦面热应力变形研究
基于长线列红外焦平面探测器冷箱组件开展焦面热应力变形研究

随着红外焦平面探测器阵列规模的不断扩大,由多层结构低温热失配形变导致的杜瓦可靠性问题愈发突出,对焦面低温形变的定量化表征需求越来越迫切。基于超长线列红外焦平面探测器冷箱组件开展焦面低温形变研究,针对多层结构粘接造成的焦面低温形变进行了理论仿真。
据麦姆斯咨询报道,近期,中国电子科技集团公司第十一研究所的科研团队在《红外》期刊上发表了以“超长线列红外探测器组件的低温面形研究”为主题的文章。该文章第一作者为张璐工程师,主要从事红外探测器杜瓦的光机设计方面的研究。
本文基于长线列红外焦平面探测器冷箱组件开展焦面热应力变形研究,分析讨论了其组成结构及材料,并借助有限元仿真手段研究了长线列红外焦平面探测器的低温应力分布及形变。设计了一种探测器工作温度下焦面热应力形变的测试方法。对比分析面形测试数据与仿真计算之间的误差,验证仿真结果的合理性,为大面阵长线列探测器焦面多层结构设计提供参考依据。
结构设计及热应力仿真分析
封装结构形式
作为制冷型红外探测器芯片的封装载体,封装结构一方面要给探测器提供一个低温工作环境(真空、低温、低噪声),同时又要满足在红外系统中应用的各种接口(光学、电学、制冷机及机械安装接口)要求。组件的光谱范围为1~2.5 μm,工作温度大于等于90 K采用真空冷箱封装形式,以满足空间真空环境下的长寿命要求。图1为杜瓦结构的示意图。
组件冷头是探测器封装结构的重要部分。它作为探测器芯片的装载面,将制冷机的冷量传递给探测器芯片;另外它还用于探测器芯片与电学引出结构的过渡。本结构中的冷头主要由安装基板、拼接衬底、探测器芯片、电学过渡板和冷屏组成。
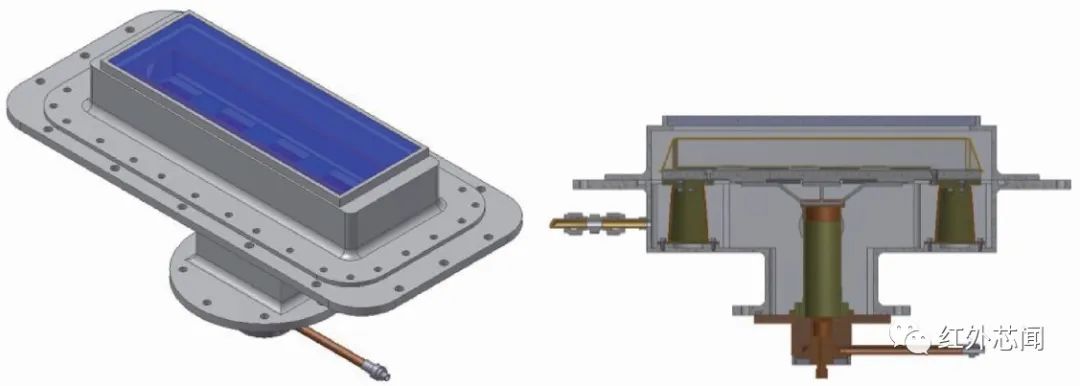
图1 杜瓦结构的示意图
图2所示为探测器芯片的排列方式,即由8片1024 × 6(×2)的探测器芯片沿线列方向、呈“几”字形拼接而成。芯片光敏面尺寸为192.6 mm × 19.5 mm。8片碲镉汞探测器芯片与8片读出电路互连后,由低温粘接剂粘接在单片Si拼接衬底上。拼接衬底通过导热胶粘接在SiC安装基板上,安装基板由螺钉固定于TC4支撑法兰上。冷头结构模型如图3所示。低温下不同材料的热膨胀系数不同会引起热失配,故需对冷头结构进行低应力低变形设计分析。
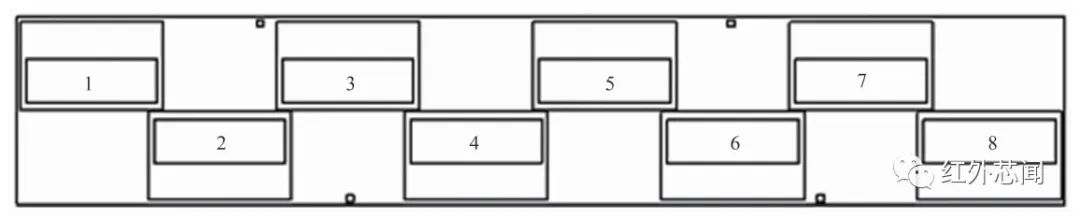
图2 芯片排列方式示意图
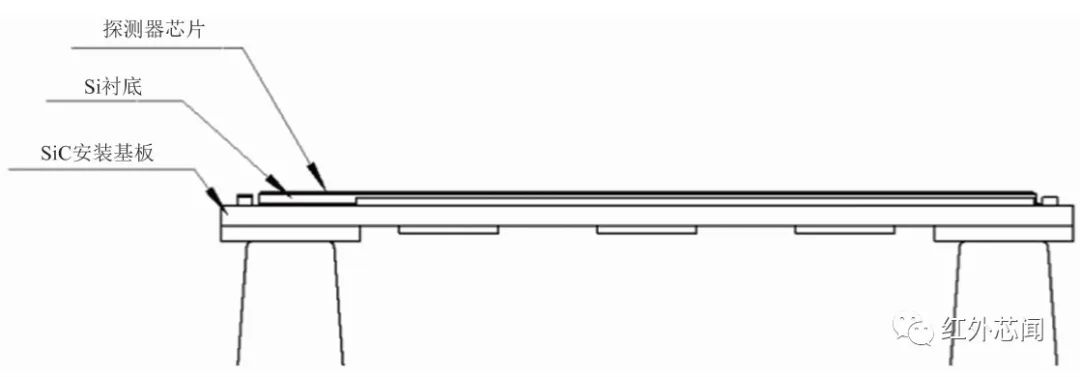
图3 冷头结构的示意图
焦面热应力仿真分析
仿真时,采用等效建模方法将铟柱和填充环氧胶简化为一层,并在此基础上施加边界条件。采用基于一维模型的计算方法,即在有限元计算中不考虑各层材料参数随温度的变化。其中,低温90 K下的材料参数由中国科学院理化技术研究所测试和提供。探测器各组成部分的材料及厚度见表1。
表1 探测器各组成部分的材料及厚度

本文设计了合理的边界条件和温度参数,并对焦面应力及变形进行了仿真计算(结果见图4~图6)。从图4中可以看出,探测器的温度约为88 K。从图5中可以看出,芯片1右下角、芯片2左上角、芯片7右下角、芯片8左上角所受的应力较大,最大值约为30.63 Mpa,这是由于此位置安装基板下方有两个支撑法兰结构。从图6中可以看出,焦面呈拱形,两边芯片向下凹约9.24 μm,中间位置芯片向下凹1.36 μm。
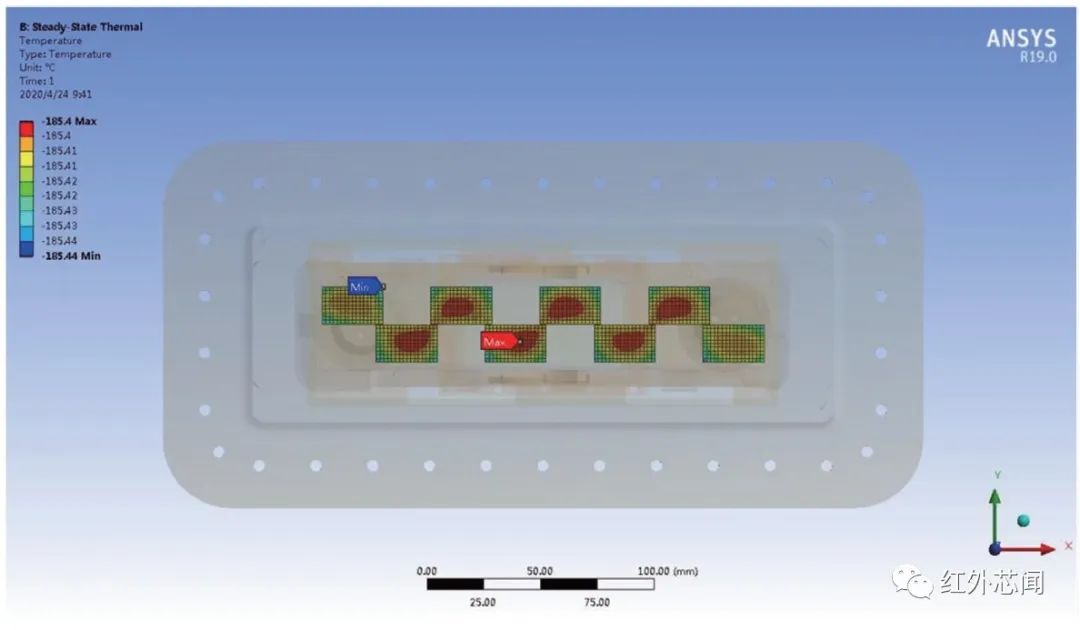
图4 探测器的温度均匀性云图
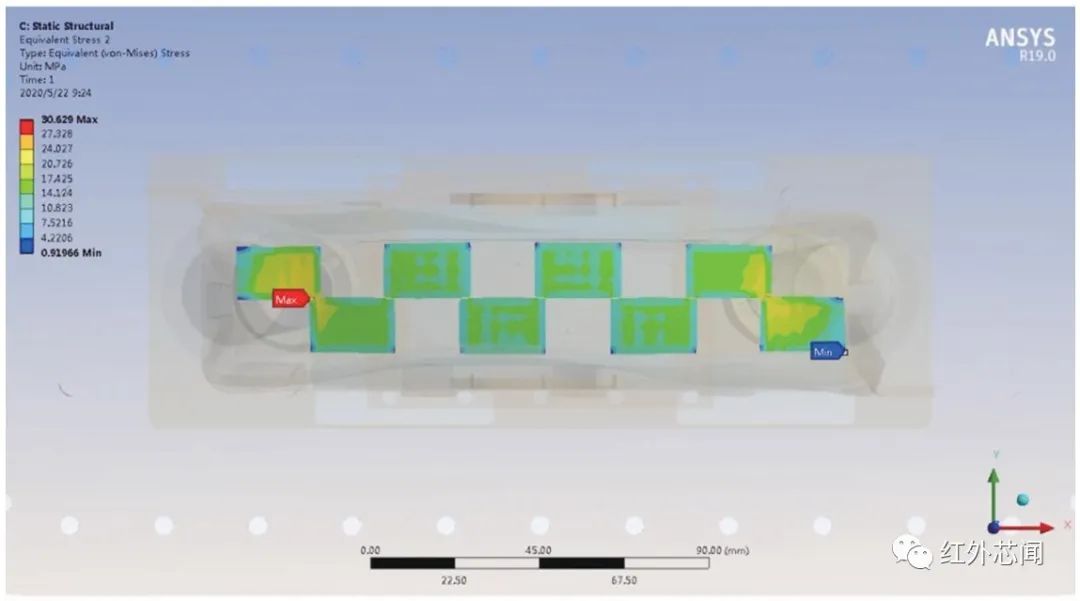
图5 90 K工作温度下的焦面应力仿真数据
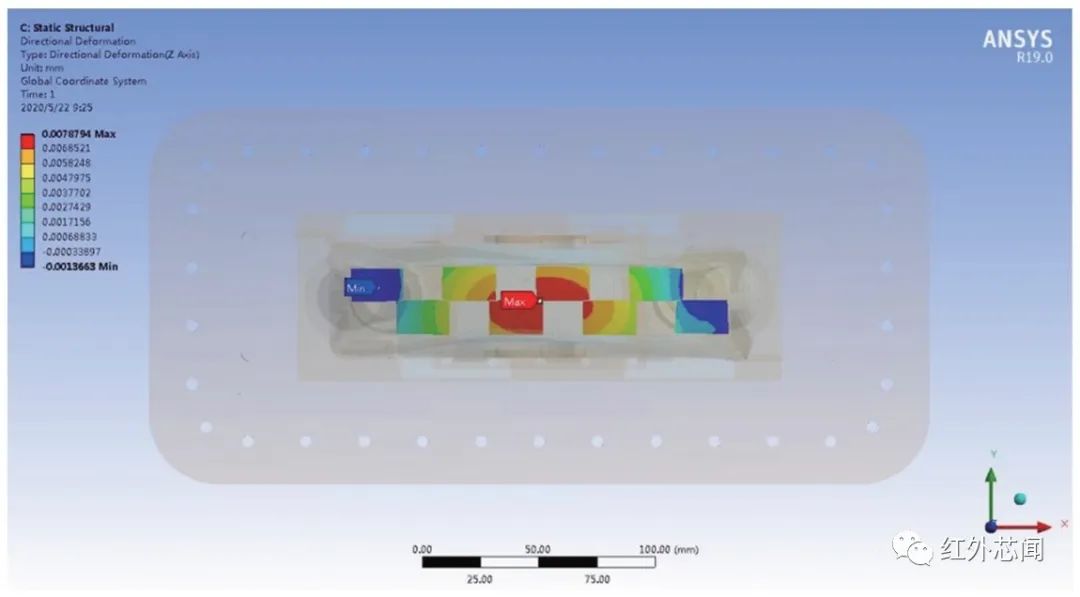
图6 90 K工作温度下的焦面低温形变仿真数据
结构热应力变形测试
测试方法介绍
超长线列红外焦平面探测器面形测试存在以下难点:一是需测量探测器实际工作温度90 K下的焦面变形,并且规避体积较大的制冷型红外探测器工作状态下由制冷机、真空泵带来的振动影响,从而保证测试结果与探测器真实工作状态的匹配性更好,数据说服力较强;二是探测器焦面规模大,由多片芯片耦合在拼接基板上制备而成,相当于对多芯片进行共焦面测试;;三是测试精度要求高,芯片拼接精度X、Y方向优于8 μm、Z向优于18 μm,所以测试精度需达微米级。
通过对结构测试要求进行分析,我们研制了精密芯片拼接检测系统。此系统X、Y向定位精度为0.5 μm,重复定位精度为0.7 μm;Z向定位精度为1.2 μm,重复定位精度为0.5 μm。项目要求的拼接焦面平面度小于20 μm,识别精度为微米级,故该系统能满足低温面形测试要求。此系统的测量工作台由CCD相机、变倍显微系统、基准大理石底座、X向运动及控制系统、Y向运动及控制系统和Z向运动及控制系统组成。CCD相机、变倍显微系统组成的探头部分可通过龙门控制系统在X、Y、Z向位移。CCD相机通过依次识别8个芯片上左右两侧的定位标识可获得芯片的Z向高度。
根据精密芯片拼接检测系统的景深要求,为保证CCD相机识别到芯片闪电标定位标识,需设计专用窗座,保证窗口到焦面的距离小于30 mm。设计专用K9玻璃窗片,保证探测器焦面的真空度和可见光探测环境。实验采用控制变量法。
测试过程
首先搭建实验平台:将探测器组件固定,使焦面正对CCD相机;控制探头部分Z向高度,使焦面位于相机焦深范围内。把探测器抽真空泵组、制冷机电源以及温度监测万用表置于系统平台外的桌子上,防止其抖动对测试产生影响。装置搭建情况如图7所示,芯片左右两侧定位标识别如图8所示。

图7 实验平台搭建示意图
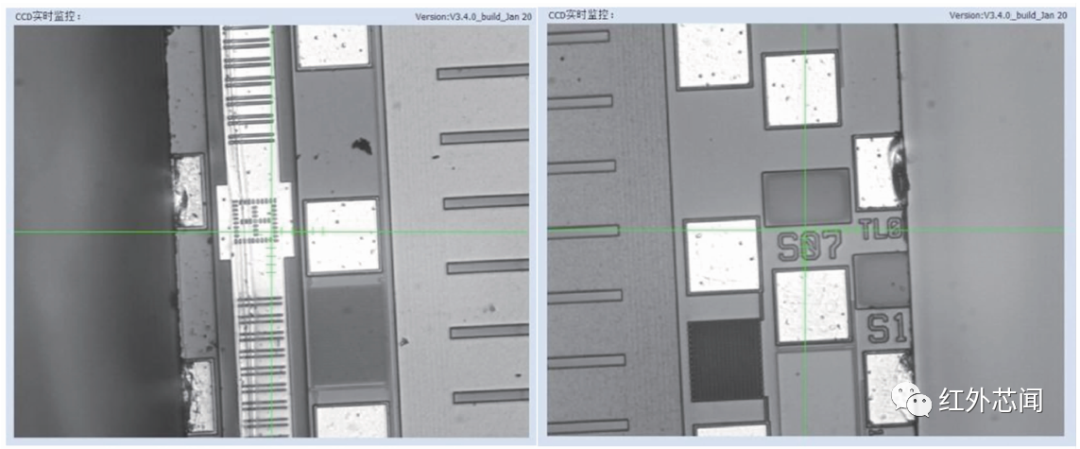
图8 芯片定位标识别
实验中采用控制变量法分别对常温、低温工作温度、回温至常温时的焦面平面度进行测量。为保证测试结果的准确性,每组实验均重复三次,测试结果取平均值。
常温面形测试
打开排气管喇叭口旋钮,启动抽真空泵。组件排气后,真空度降至10⁻³ Pa量级时关闭泵和喇叭口旋钮。控制CCD相机移动,使其依次识别清楚芯片定位标识,依次记录芯片定位标识的Z向高度。
低温面形测试
在做完常温面形测试后,分次调高电源电压值,直至电源功率达到组件制冷要求。通过读取焦面二极管电压值确定焦面工作温度。为防止真空泵抽气造成的振动影响焦面测试,把排气管喇叭口旋钮拧上,将泵关闭;制冷机持续打开,制冷机造成的振动对焦面测试的影响很小,可忽略不计。控制CCD相机移动,使其依次识别清楚芯片定位标识,依次记录定位标识的Z向高度。
回温测试
在完成低温面形测试后,将制冷机停止。为防止芯片结霜,真空泵仍处于关闭状态。待焦面温度恢复到与常温面形测试温度一致时,控制CCD相机移动,使其依次识别清楚芯片定位标识,依次记录定位标识的Z向高度。
测试结果处理
采用以上测试方案对红外焦平面探测器进行了低温面形测试实验(结果见表2和表3)。组件放置在CCD下方时有一定的倾斜,所以常温296 K下芯片定位识别点的Z向位置差别大。对于本实验,仅考虑低温下Z向位置偏移量即可分析芯片低温面形的变化,对数据进行拟合处理(结果见图9)。从图中可以看出,低温下芯片呈拱形,与仿真结果基本一致;整个焦面都向下弯曲,两侧弯曲程度大,中间弯曲程度小;;左侧芯片1、3、2、4的弯曲程度大于芯片5、7、6、8。
表2 面形测试数据统计表1

表3 面形测试数据统计表2

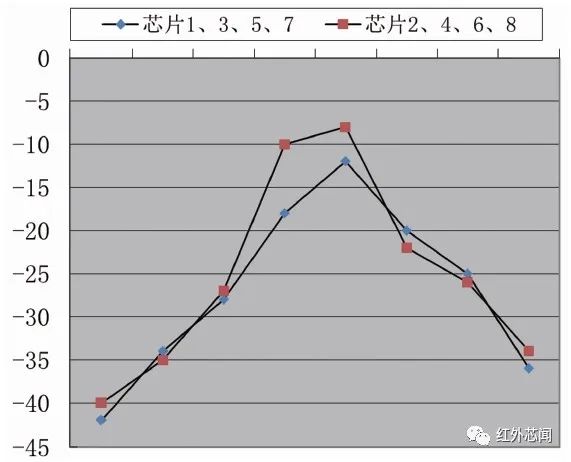
图9 低温下的面形变化趋势
焦面低温形变与胶层厚度、胶层均匀性、拼接衬底、安装基板材料及平面度等多种因素有关。综合测试数据和仿真数据,在后续设计时可预留边缘位置芯片的形变公差,增大探测器低温工作时的焦面平面度,从而提高探测器的光学响应度。
仿真与测试结果分析
通过对比仿真结果与测试结果可以看出,低温下焦面变形曲线均为上凸形,这与多层材料的热膨胀系数不同有关。在后续设计中应进一步优化材料的匹配性。另外,仿真数据变形量与实测数据变形量存在差值,表明仿真数据的边界条件、网格划分、胶层设置还存在优化空间。该研究可用于指导后续的设计工作,以增大探测器低温工作时的焦面平面度,从而有利于提高探测器的光学响应度。
结论
为满足航天等领域的特殊需求,红外焦平面探测器的阵列规模日益扩大,多层结构的低温热失配形变导致的杜瓦可靠性问题愈发突出。本文对超长线列红外探测器开展了焦面低温形变研究,针对多层结构粘接造成的低温形变进行了理论仿真;设计了探测器工作温度下焦面低温形变的测试方法(测试精度达1 μm)。该方法可规避体积较大的制冷型红外探测器工作状态下由制冷机、真空泵带来的振动影响,数据说服力较强。
对于本文研究的红外探测器组件来说,低温下焦面呈拱形,对比分析面形测试结果与仿真计算之间的误差,验证仿真结果的合理性。在以后的探测器设计中,通过对模型的精准仿真可以有效评估焦面的变形。未来可选择线膨胀系数更匹配的材料,提升探测器低温工作时的焦面平面度,从而提高探测器的光学响应度。
审核编辑:刘清
-
CCD
+关注
关注
32文章
907浏览量
149969 -
仿真器
+关注
关注
14文章
1053浏览量
88276 -
SiC
+关注
关注
32文章
3928浏览量
70370 -
红外探测器
+关注
关注
5文章
327浏览量
19112 -
芯片封装
+关注
关注
14文章
626浏览量
32439
原文标题:超长线列红外探测器组件的低温面形研究
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
[VirtualLab] 激光引导无焦系统的分析与设计
探测器革命
[VirtualLab] 非球面透镜后焦点研究
[VirtualLab] 高数值孔径物镜焦斑分析
热像仪的“视网膜”——红外焦平面探测器为何重要?

芯火微电子8微米超微型热像机芯iTL608 | ApexCore上“芯”,更清晰,更轻盈

红外焦平面探测器核心指标NETD介绍
清华大学在分焦面超像素阵列光刻制造领域取得新进展
Amphenol数字红外探测器评估套件使用指南
红外焦平面探测器的分辨率有哪些?高分辨率有哪些优势?

红外焦平面探测器核心指标:像元尺寸
上海技物所研制出长波红外圆偏振焦平面阵列探测器
无锡红外传感器公司兴华衡辉科技半年获两轮融资,核心团队参与我国首款锑化铟红外焦平面探测器研制




评论