 院士谈共融机器人产业群的创新发展和跨越发展
院士谈共融机器人产业群的创新发展和跨越发展

本文来自于第八届中国机器人峰会上熊有伦院士题为《凝心聚力,实现共融机器人产业群的创新发展、跨越发展》的报告,通过录音整理而成。
文章首先从机器人的概念谈起,介绍了机器人的分类及其对产业、科技、生产、教育等的影响;接着重点围绕共融机器人产业群的创新发展进行论述,一是要夯实科学技术基础,加强基础研究、突破关键技术、解决“卡脖子”问题;二是要加强机器人科技人才教育与培养,支持高校科研院所培养专业技术和复合型高端人才。此外,在夯实科技基础部分,文章重点介绍了华中科技大学在机器人化智能制造、软体机器人等方面开展的基础研究工作及相关成果。
▍1.共融机器人
1.1 机器人的定义
教科书的序言对机器人提出了一个模糊定义,将机器人作为“操作”“海陆空”“人机共融”三个子类的合并。其中,“操作臂”为工业机器人和建筑机器人,包括焊接、喷漆、装配机器人,工程机械等;海陆空主要包括无人机、智能驾驶、网联汽车、水下机器人(AGV&AUV)等;人机共融意为拟人、仿生、类生机器人,包括:微纳机器人、细胞操作机器人、软体机器人等。根据机器人的定义,可以借用共融机器人来表示机器人的内涵和外延,刻画机器人的本质和特征,描述机器人的演变。
如今,机器人制造、建造,机器人进入海陆空,机器人用于康复医疗、微创手术等都对人类社会、经济发展、日常生活产生巨大影响,共融机器人的发展离不开机器人产业的规划、技术的进步以及人才的培养。
1.2 机器人与汽车的完美结合
1.2.1 机器人与汽车早期结合
上世纪80年代,机器人与汽车的完美结合(图1)不仅带动工业机器人的迅猛发展,而且促进汽车工业从自动化迈向数字化,成为20世纪的伟大科技成就。同时也是产业技术进步的标志之一,是先进生产力的重要组成部分。
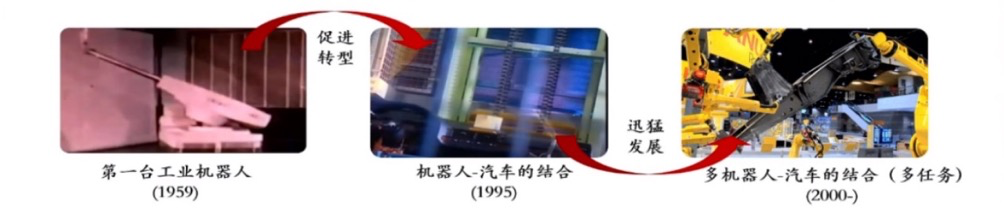
图1 机器人与汽车的结合
罗森布洛克(H.H.Rosenbrock)教授在其报告“自动化与社会”(Automation and Society)中批判了1979年以前英国工党关于限制采用工业机器人的政策,导致英国的汽车工业长期处于落后的状态,直至今日依旧落后于德国、日本、美国、法国、意大利、韩国。我国吸取了英国的经验教训,大力发展汽车工业,三年疫情虽然导致五金出口普遍减少,但是汽车出口有所增加,这是现代工业体系建立的一个表现。
1.2.2 机器人与汽车的深度融合
本世纪以来,机器人与汽车逐渐实现深度融合,以新能源、新材料和电子信息等为代表的技术创新正在改变着制造业的要素配置方式、生产组织模式和产业发展形态。
新能源汽车、网联汽车等的蓬勃发展将推进汽车的轻量化、电动化、智能化。例如,2019年沃尔沃公司展示的概念车360c没有驾驶室,只有工作空间跟生活空间,智能汽车(图2)将不再只是一个交通运输工具,而是人类的移动工作空间和移动生活空间,将极大地改变人们的生活方式,成为实体经济的重要载体并产生重大的社会经济效果。
1.2.3 机器人和汽车的融合发展对社会经济的影响
凭借机器人技术构建万物皆可自由移动的生态系统,使物体无论何种体积或形状都可在2D和3D空间自由运动。最终实现所有物体都被赋予移动性的“Mobility of Thing(MoT)”生态系统(图3)。
现代汽车在2022年消费电子展(Consumer Electronics Show,CES)上发布机器人愿景——机器人技术与元宇宙相结合的“Metamobility”将拓展移动出行的维度,实现超越现实到虚拟世界的终极移动出行自由。
1.3 机器人学的产生与发展
机器人学(Robotics)是研究机器人的学问,其概念、内容不断扩大并逐渐衍生为一门交叉融合、综合开放的机器人科学(Robotics Science。机器人学的产生是实现机器人创新发展和跨越发展的引擎。机器人学几乎和第一代工业机器人同时产生,机器人的发展使得机器人学内容更加丰富。
1.3.1 从力学角度看机器人学
从力学的角度看,机器人学是研究刚体、多体、软体、人体(动物)的运动(规划与控制)和接触作用(形封闭和力封闭),并且要实现智能化。对于刚体而言,运动的描述不能采用线性代数,要采用力学代数;多刚体涉及拓扑结构、指数积、双臂协调等问题;软体作为无限维的多体,需要运用偏微分方程、半群、有限元等方式;对于人体的研究更为复杂,包括脑模型、思维认知、人体组织结构等(图4)。因此,机器人学的发展同时也促进了力学、生命科学、信息科学、人工智能、生物智能等多学科的发展。
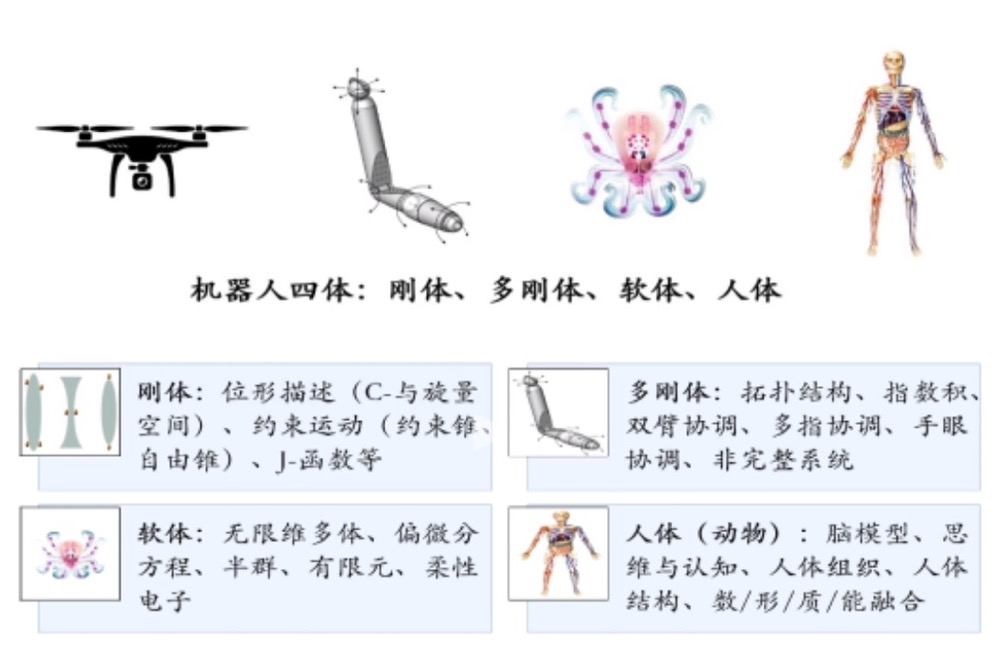
图4 机器人的“四体”研究
1.3.2 从其他角度看机器人学
机器人是关于“形”的科学问题,研究工作空间图像和点云数据的获取、曲面重构、几何造型,以及在形位空间(C-Space)(图5)中机器人的约束和运动之间的关系。
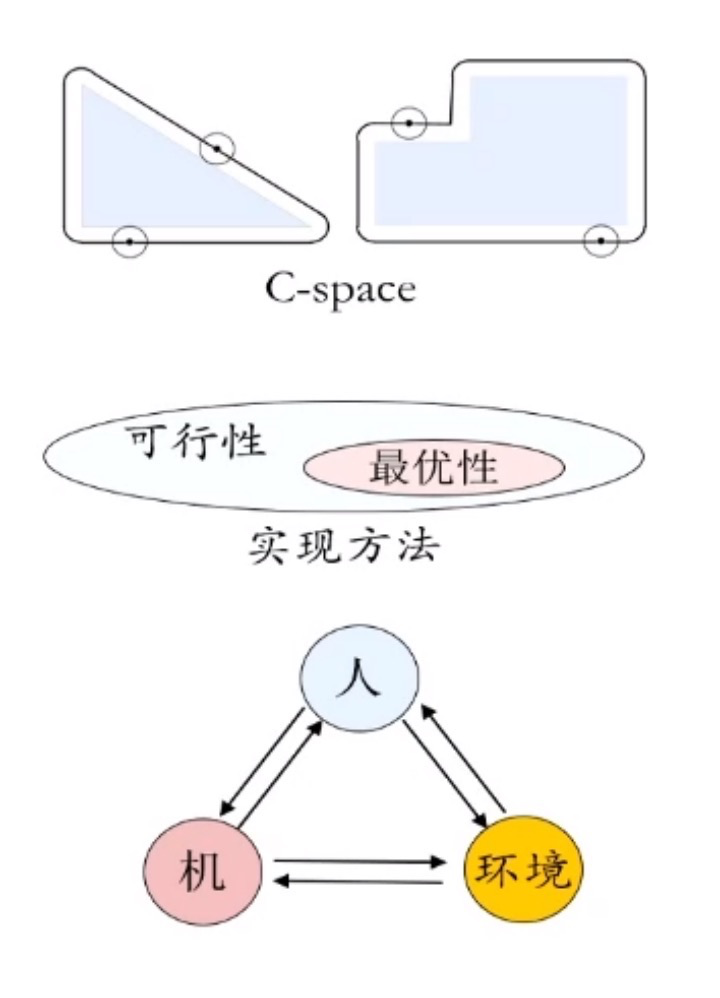
图5 C-Space
机器人还是关于“性”的科学问题,研究过程中需要解决机器人在建模、仿真、规划、控制、设计、离线编程、导航等问题,包括问题的可行性、最优性和计算机实现方法。
同时,人—机—环境共融(图6)也是机器人学的关注重点,人与机器人之间的通讯、控制、合作与协调等,以及相互交流、相互影响、相互作用的耦合关系。人类的终极目标是建立和谐社会,包括人与人之间的和谐,人与自然的和谐,人与机器人之间的和谐。
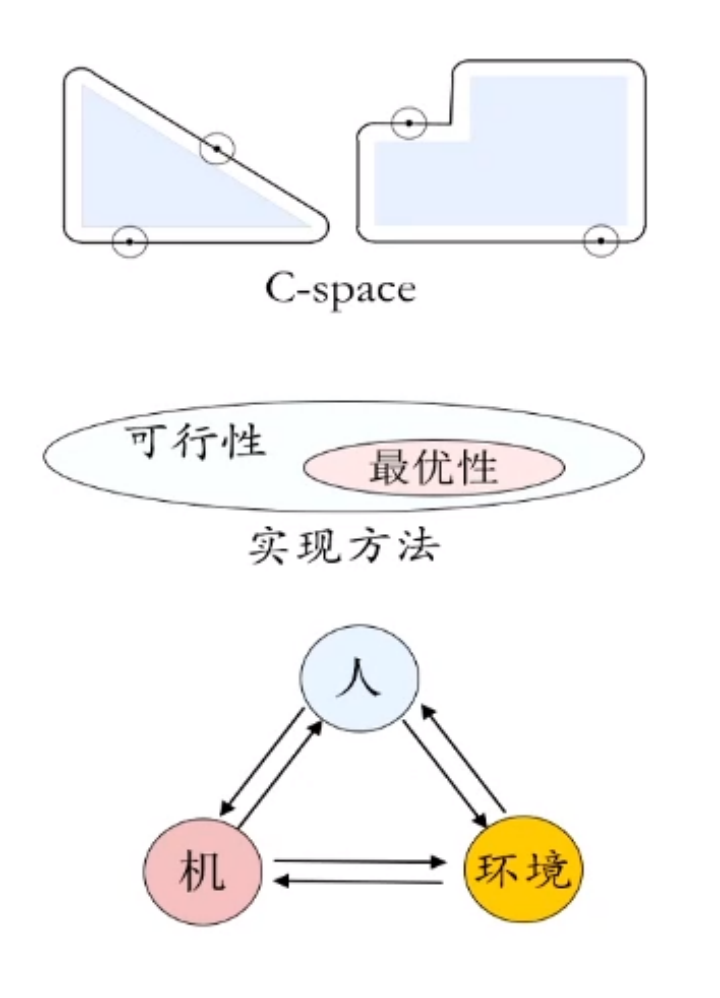
图6 人—机—环境共融
▍2.机器人产业群
2.1 产生与发展
机器人产业群是实体经济的重要载体,其发展极大加快了实体经济数字化、智能化和柔性化的进程,是现代产业体系的重要组成部分。从中央政治局会议到二十届中央财经委员会第一次会议,“加快建设以实体经济为支撑的现代化产业体系”多次出现在中国顶层部署之中,机器人产业群的发展应当引起更大的重视。
按照机器人的定义,机器人产业群也能够分为三个子类,操作类(工业机器人和建筑机器人)、海陆空类、人机共融类。操作类的产业群要实现数字化,提升传统工业机器人的生产效率、优化产品质量、实现灵活生产、提升安全性,并利用数字驱动的优化实现持续改进,从而提升企业竞争力和可持续发展。海陆空类的产业群要逐步实现智能化,包括行为智能与产品智能,智能化的机器人具备自主感知、决策和执行能力,能够应用于海陆空多个领域(如制造业、物流业、医疗等),推动科技进步创新,提高工作效率与生产力,增强安全性并降低风险,改善人类生活质量,为人类社会带来巨大的价值和影响。人机共融类不仅要实现数字化、智能化,还要实现柔性化。柔性化的机器人能够快速适应不同任务和工作环境的需求,实现生产线的高效灵活运作,提高生产线的灵活性和效率,拓展应用领域和增强人机协作能力,通过与人类进行紧密的协作和交互,实现更高效、安全和多样化的生产和服务,目前,柔性电池的发展是实现柔性化的一个重要途径。
共融机器人产业群(图7)涵盖5类产业,电子信息产业、战略新兴产业、高技术新兴产业、民生支柱产业和传统支柱产业。作为工程科学最活跃的领域,共融机器人催生了许多新技术、新理论、新软件、新方法,是构建现代化产业体系的基础,也是劳动密集型产业向高技术产业转型的基础,对此,要给予机器人产业群发展极大的重视。
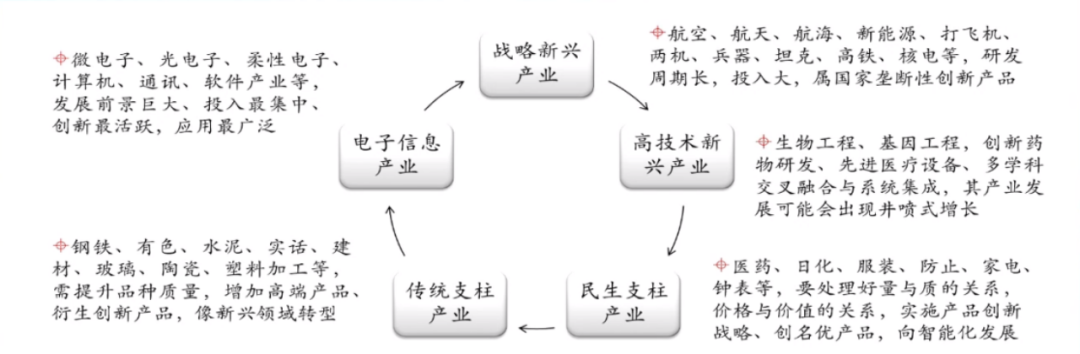
图7 共融机器人产业群
2.2 国际发展战略
国际方面,美国在2011-2013年间相继推出“国家机器人计划”及2.0版机器人发展路线图,2016年制定新的路线图,旨在占据美国在下一代机器人的领先地位。欧盟及欧洲机器人协会于2014年联合启动“火花计划”,到2020年已投入28亿欧元用于研发基于大数据、云计算、移动互联网等新一代信息技术的高级机器人。
未来,机器人与新能源汽车的深度融合,将带动汽车沿着智能、绿色和安全的方向发展,智能汽车与无人机、水下机器人(图8)一起,形成共融机器人产业,这将是今后30年各国争夺的战略高地。
2.3 机器人与制造业发展
机器人产业群实质是机器人与制造业发展之间的关系,中国各大产业发展进程通常有五个阶段,从中国制造到中国智造,到产品,到品牌,最后是服务(图9)。从中国高铁的发展中可以汲取一定的经验,引进消化、自主研发、创建品牌、服务世界要逐步进行。
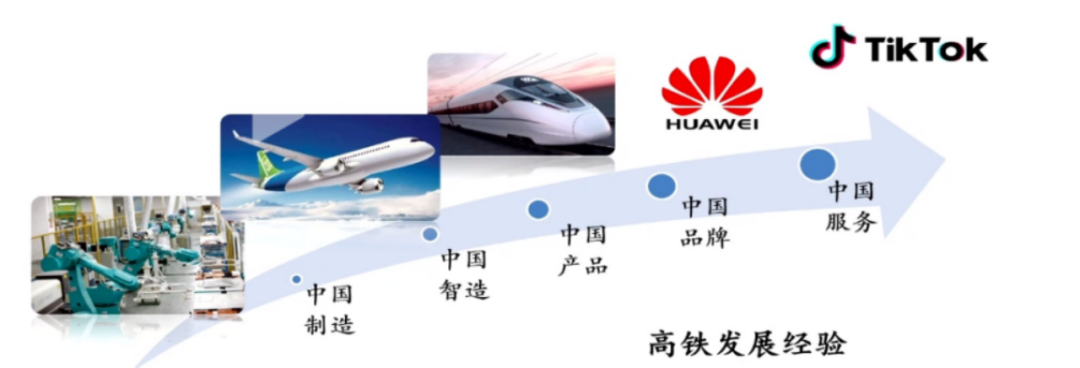
图9 中国产业发展进程
▍3.机器人产业集群的创新发展
机器人是制造业重要的支柱,已成为第三次工业革命和第四次工业革命的一个重要增长点,影响全球制造格局。要实现机器人产业集群的创新发展一是要夯实科技基础,二是要加强人才培养与教育
3.1 夯实科技基础
机器人产业群要实现创新发展首先要夯实科技基础(图10),习近平总书记指出,“要针对创新链的前端和终端,加强科技基础研究”,而在机器人核心技术方面只有加强科技基础研究,才能突破颠覆性技术。卡脖子问题是目前面临的最大难题,其实质是基础原理、基础性研究,包括理论研究和事业研究的缺乏,因此夯实基础显得更为重要。
近年来,华中科技大学围绕机器人化智能制造开展基础研究,并取得了较好的效果。
3.1.1 机器人化智能制造
所谓机器人化智能制造,其本质是利用机器人灵巧、顺应和协同等特点,将人类智慧和知识经验融入制造过程,实现不确定性非结构化环境下的机器人自律制造。围绕机器人化智能制造,华中科技大学提出三大科学问题(图11),第一个是机器人化加工的灵巧性和线性调控,用于解决复杂空间;第二个是机器人加工多模态感知行为顺应,重点解决大范围高精度的加工难题;第三个是人—机—环境共融制造系统的进化,是一种知识的积累、加工方法的改进,可以实现工艺知识学习和制造系统的进化。
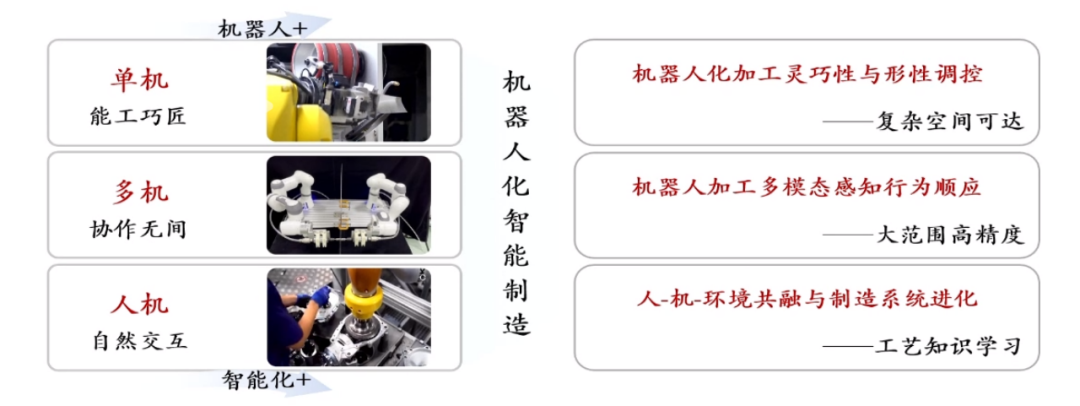
图11 机器人化智能制造
3.1.1.1 机器人加工创新系统开发
机器人加工创新系统(图12)的开发,提升了机器人对于任务环境的适应性以及可加工的尺度。面对固定的机床,机器人从一维移动到二维移动到如今爬壁加工机器人的三维移动。两栖/多栖加工机器人跨介质环境的能力,能够突破加工尺度、地域、时间的三重约束,利用无处不在的机器人、传感(感知)和人工智能,实现无处不在的制造。
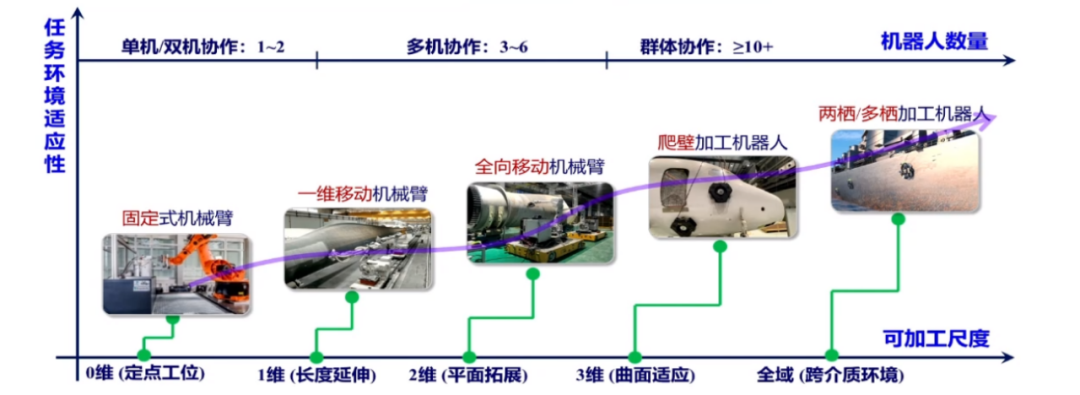
图12 机器人加工创新系统
3.1.1.2 大型构件多机器人协同加工模式创新
在突破加工尺度、地域和时间约束的基础上,大型构件多机器人协同加工能够实现“随时随地五轴原位加工”,通过大范围移动定位和局部精雕细琢,把“机床”举起来;另外“蚂蚁噬骨”式集群加工通过曲面顺应吸附、力位柔顺控制、自律集群加工实现吸附式移动加工(图13)。
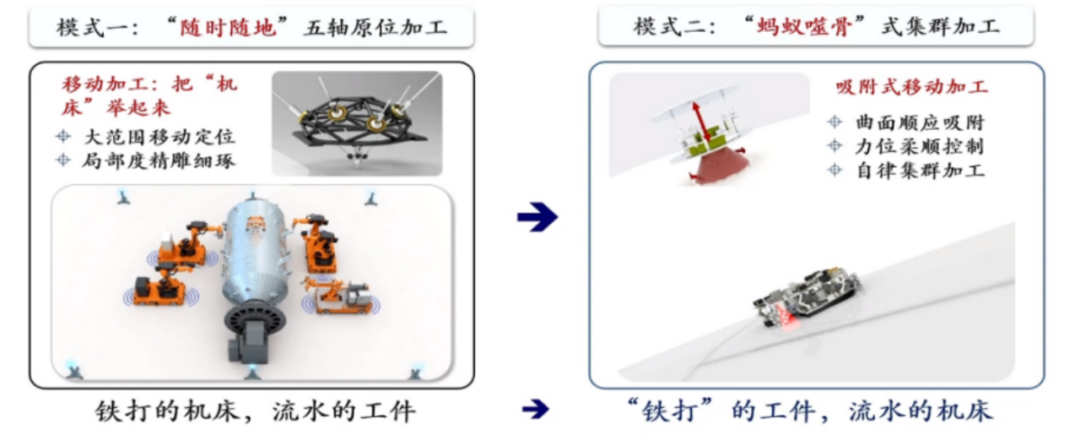
图13 大型构件多机器人协同加工模式
3.1.1.3 机器人加工全域精度可控理论
工业机器人要求低精度、低刚度,目前刚度随姿态改变产生非线性变化,全域精度的保持非常困难。笔者及其研究团队提出了“机器人加工全域精度可控理论”(图14),建立了超大尺度空间机器人移动加工误差顺应补偿机制与精度可控理论,实现了大型复杂构件(>50m)全域高精度磨抛加工(精度优于±50um,Ra1.6um)。
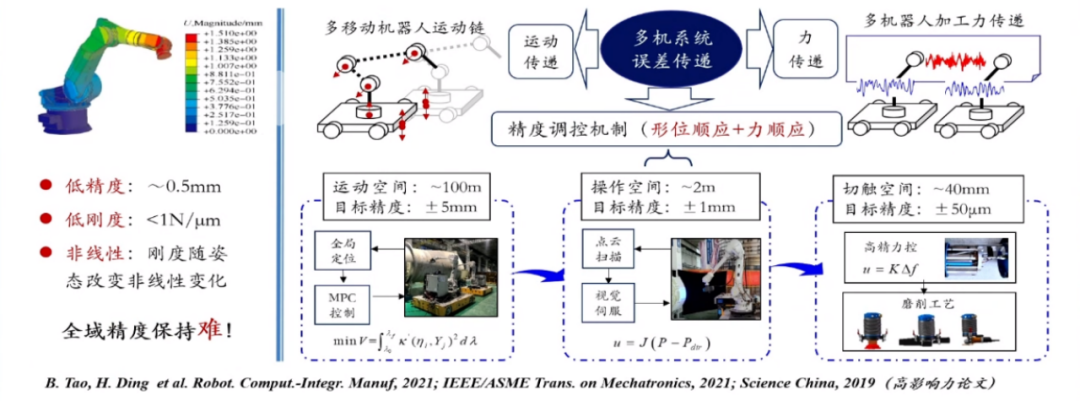
图14 机器人加工全域精度可控理论
3..1.1.4机器人测量—操作—加工一体化技术
(1)全场景跨尺度测量
目前大型加工件在拼接测量方面存在许多问题,如加工件无标记点导致的初始拼接基准缺乏、缺乏几何特征和纹理特征导致拼接精度低等,对此,笔者及其团队成员提出了全场景跨尺度测量(图15),建立了“局部精扫—邻域拼接—全局优化”的大型构件拼接测量方法,突破了工件表面非朗伯高光反射、弱结构特征对拼接测量的影响。
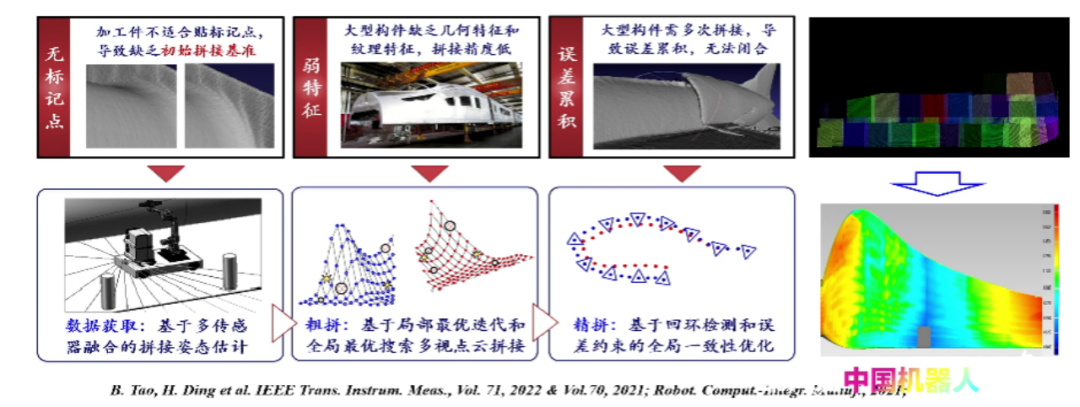
图15 全场景跨尺度测量
(2) 自律跟踪控制
基于操作过程中超大范围在线自/互定位缺乏加工基准,移动平台平动误差>5mm、转动误差>1等现存问题,笔者及其团队建立了基于“点云伺服+最优刚度”约束的单机器人动态寻位策略,提出了基于同名点空间定位的多机器人动态寻位方法(图16)。
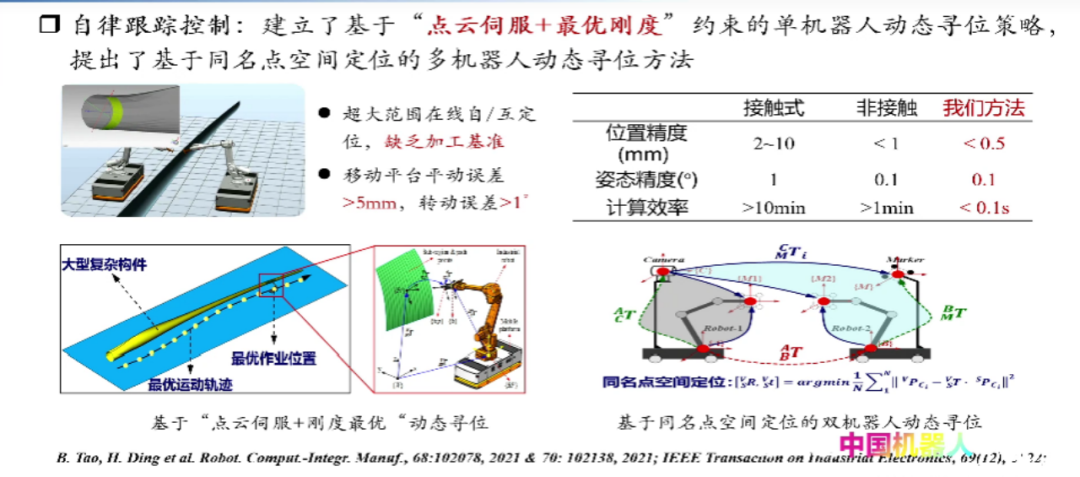
图16 自律跟踪控制
3.1.1.5 自适应加工
在加工技术方面,通过探索—学习机制,实现单机自适应加工(图17)。基于刚柔对偶、非线性阻抗控制,实现了弱刚性构件双机器人互为支撑加工,极大地提升了精度,磨削精度≤±20um。
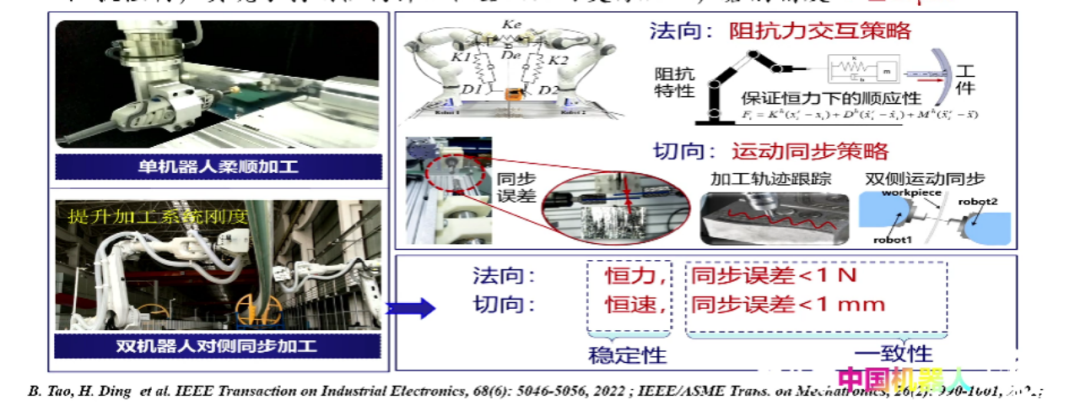
图17 自适应加工
3..1.1.6 大型复杂构件吸附式移动机器人集群制造
爬壁加工机器人是具备变曲率曲面主动顺应吸附与自适应恒力磨抛的机器人,目前正在上海飞机制造公司进行工艺验证(图18)。飞机蒙皮表面多爬壁机器人协同蒙皮活化,变曲率曲面吸附力稳定大于1000N,轨迹追踪精度为4mm,有望突破大飞机蒙皮活化产能瓶颈。
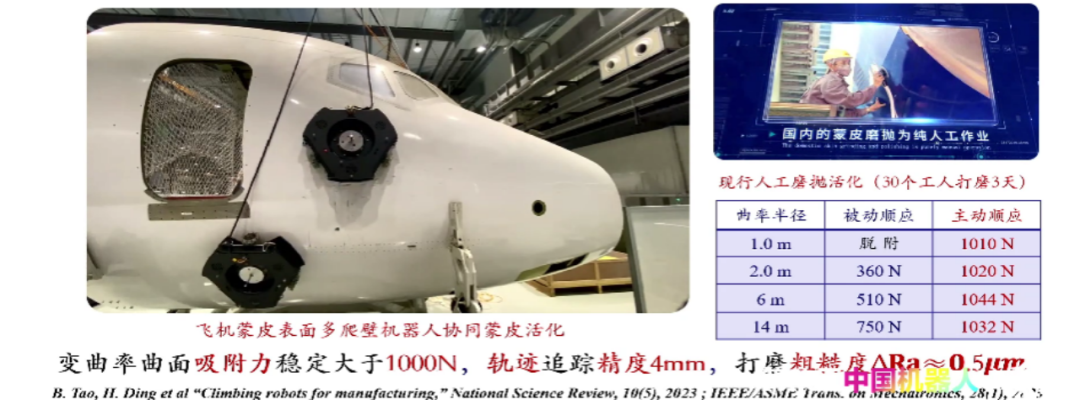
图18 大型复杂构件吸附式移动机器人集群制造
3..1.1.7 大型复杂构件机器人集群跨介质制造
两栖吸附式移动机器人集群(图19)不仅可以在陆地作业,也可以在水下作业,为海工装备在役运维提供了变革思路。该吸附式移动机器人具有吸得“稳”、定得“准”、作业“快”的特点,可见大型复杂构件机器人的制造也逐渐呈现出突破制造尺度、地域、时间的约束。
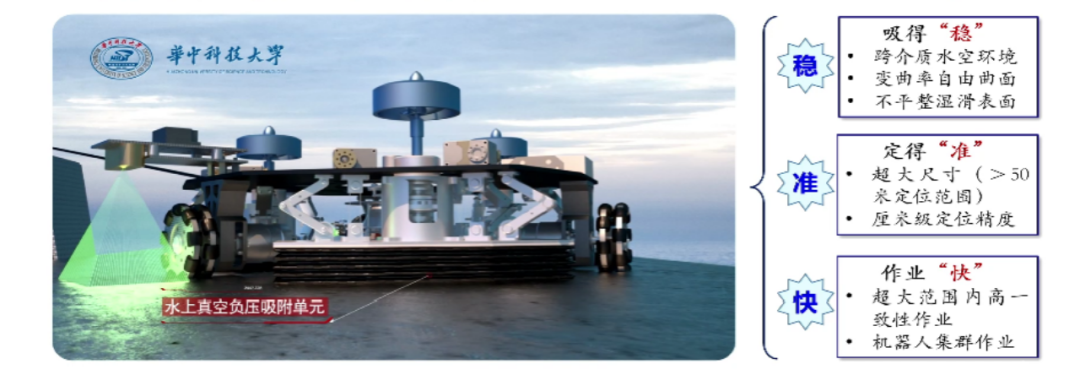
图19 大型复杂构件机器人集群跨介质制造
3.1.1. 8规划、控制、避障,2D—3D一体化方法
海陆空机器人与工业机器人在学科上的共同之处在于运动规划、轨迹控制与实时避障,且都要采取二维、三维统一的方法(图20)。意大利热那亚大学Antonio Sgorbissa发表于《国际机器人研究杂志》(International Journal of Robotics Research)的文章二维度和三维集成机器人规划、路径跟踪和避障:轮式机器人、水下机器人和多旋翼(Integrated robot planning, path following, and obstacle avoidance in two and three dimensions: wheeled robots, underwater vehicles, and multicopters),提出了一种创新的、集成的解决方案,用于路径规划、路径跟踪和避障,适用于2D和3D导航。该方法以连接起点和目标位置的通用曲线作为输入,即使在没有全局信息的情况下,也能在迷宫环境中找到从起点到目标的对应路径,最终避免了局部感知障碍。
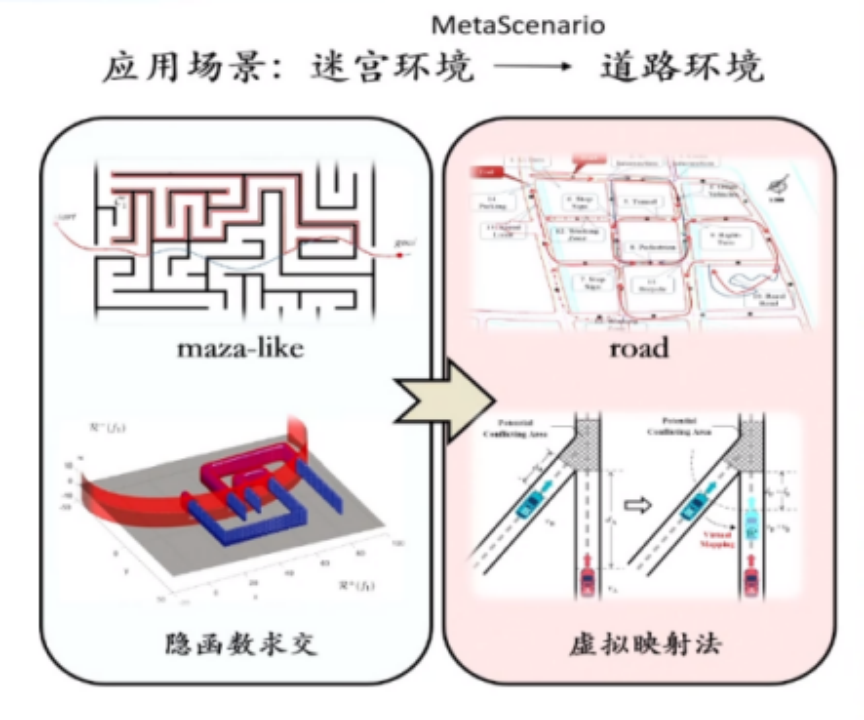
图20 规划、控制、避障,2D—3D一体化方法
3.1.1.9 手眼系统与ADAS车载系统
海陆空机器人与工业机器人的另一共同之处可以视为“手眼协调系统”,不同之处在于道路环境与上面的加工环境。智能汽车也是一种具备视觉、雷达和超声测量的机器人,驾驶安全作为汽车领域研究的重要问题,驾驶安全监控系统主要分为车载系统和路侧系统(图21)。
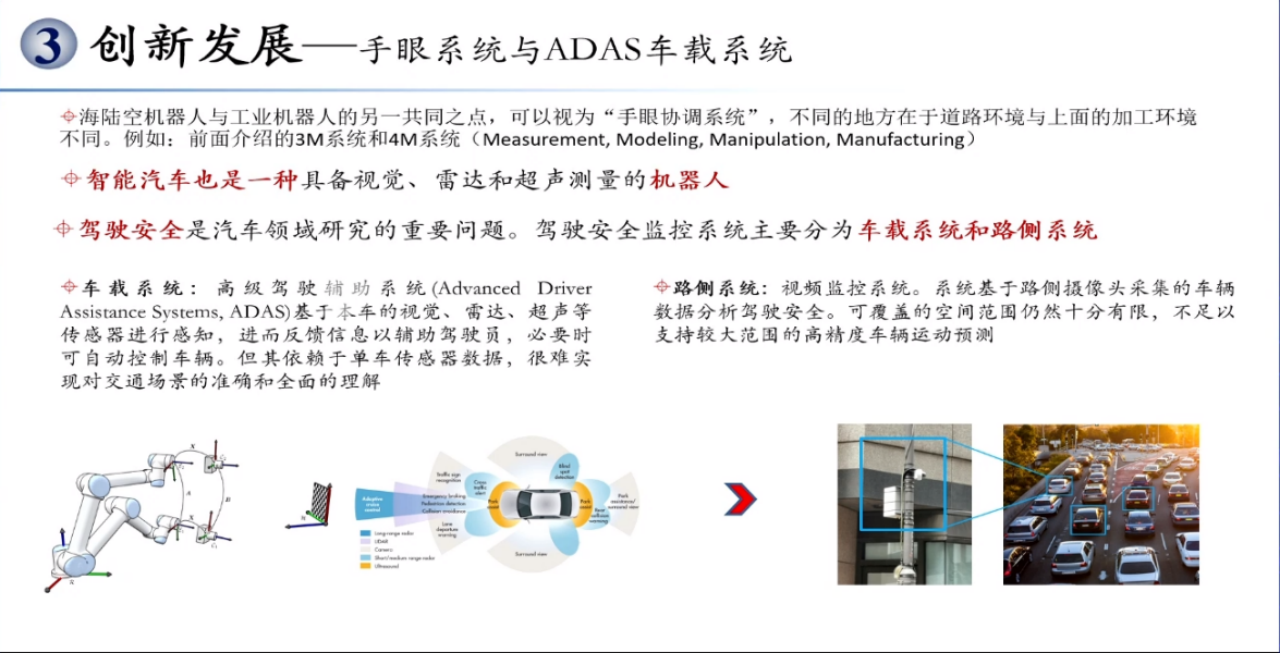
图21 车载系统与路侧系统
手眼系统的研究很早,可以追溯到20世纪80年代,现在实际应用多达几百种,目前逐渐发展为车与万物(Vchicle-to-Everything, V2X)通信技术,成为解决安全问题的新方案,车载系统和路侧系统就是基于手眼系统的V2X万物互联(图22),因海量数据难以在云端完全处理,路侧设备成为重要的处理单元,实现“车—边端—云”的分级架构。此外,手眼系统可以进一步发展成为手眼脑系统,从而为拟人机器人、仿生机器人和类生机器人的研究提供技术支撑。
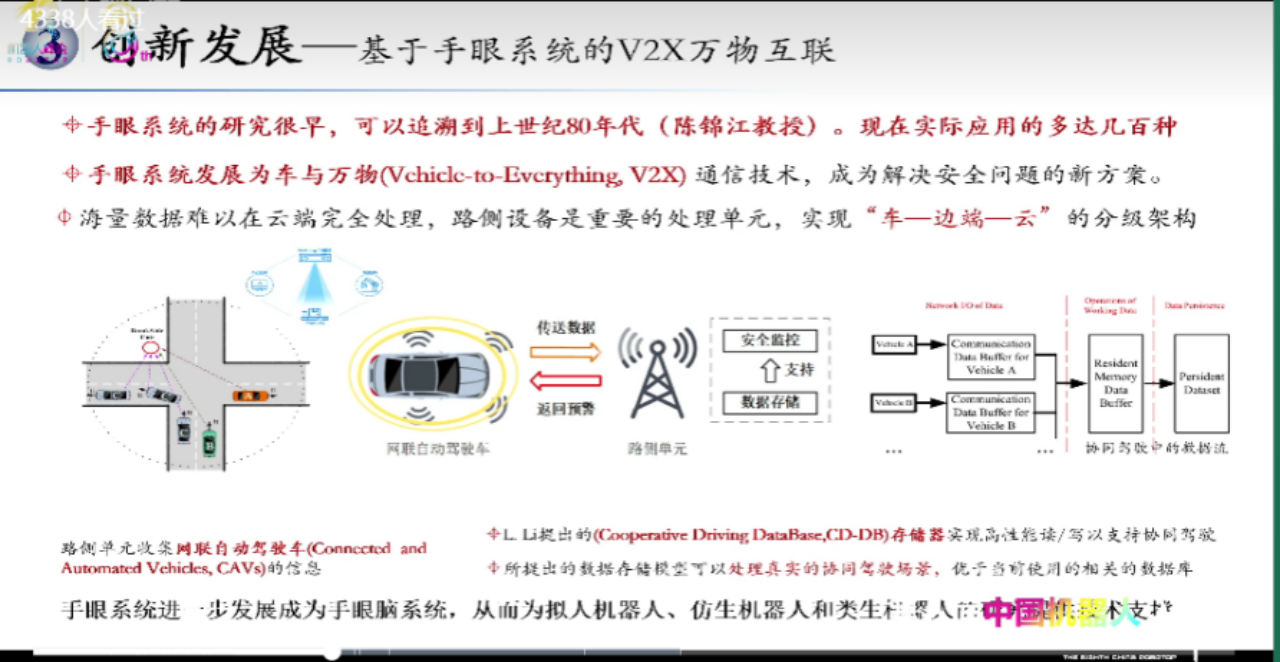
图22 基于手眼系统的V2X万物互联
3.1.1.10 自主无人艇集群协同控制
自主无人艇集群协同控制技术要求同步“快”、调控“灵”、种类“多”,能够充分利用局部信息加快同步,高效精准调控集群构型应对突发状况,在多重约束下协同多类无人艇,即实现异构无人艇集群的协同捕获(图23)。无人艇集群在突破异构动力学约束的情况下,实现分布式航道测量和稳定模态渐进耦合的协同控制。

图23 异构无人艇集群协同捕获
3.1.1.11无人艇—无人机集群跨域协同
无人艇、无人机集群的协同是一种跨领域的协同方式(图24),通过研究训练,能够提高协同无人艇—无人机种类,以及降低无人艇—无人机协同降落的误差。
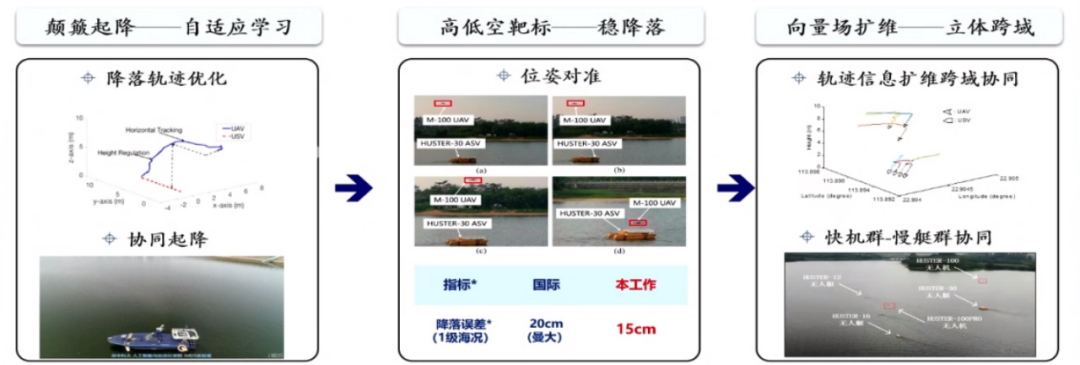
图24 无人艇—无人机集群跨域协同
同时,笔者及其团队自主研发了系列感知、驱动、调控部件,从1.2米到10米20吨的系列十余类巡逻、侦查、警戒等无人艇装备(图25)。

图25 无人艇装备、核心功能部件及应用系统
3.1.2 软体机器人
中国国家自然基金委“共融机器人基础理论与关键技术”重大计划与科技部“智能机器人”重点专项都将刚柔软融合技术列为重点指南方向。软体机器人(图26)凭借柔顺、大变形,友好交互等特征,在医疗、勘探、制造、人机交互等领域具有强大的应用潜力。作为材料学、仿生学、机器人学等多学科深度交叉的产物,由于其基于软材料和大变形特性,完全颠覆了原来以硬质材料和小变形为主的设计方法和加工体系。目前国际上新的软体机器人设计方法和加工工艺不断涌现,使得软体机器人研究成为机器人研究的最前沿。

图26 软体机器人
微小软体机器人(图27)是将材料通过加工做成有用的结构并产生动作,这些动作构成的一些功能就是机器人的功能,更重要的是该机器人不仅有动作、功能,而且具有生物智能。微小软体机器人从材料、结构、驱动、功能和智能(智慧)多层次的制备与性能的集成工艺,概括新软体机器人的设计方法,为进一步揭示微小软体机器人的人工进化、人工选择提供理论依据和技术手段,将人工智能和生物智能结合起来,用人工进化代替自然进化。
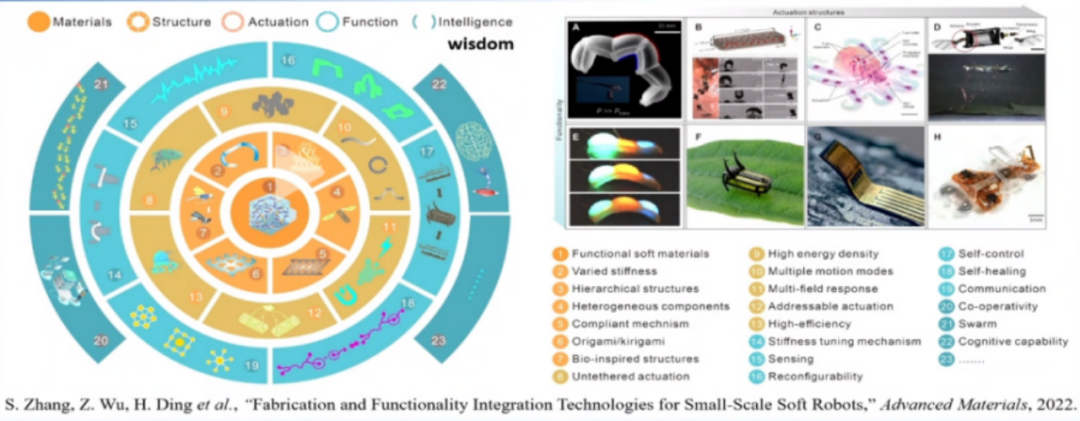
图27 微小软体机器人
3.1.2.1 机器人电子皮肤与类人触觉感知
机器人电子皮肤(图28)是将各种电子元器件集成在柔性基板上而形成的皮肤状的电路板,具有和人体皮肤一样的柔韧性和弹性,以及类人触觉感知。笔者及其团队研发的电子皮肤最小检测力为0.1Pa,灵敏度为9500KPa-1,1032通道大面积检测,响应时间小于30ms,目前已经大面积应用于KUKA机器人末端轴,实现工业现场碰撞检测与人机交互。
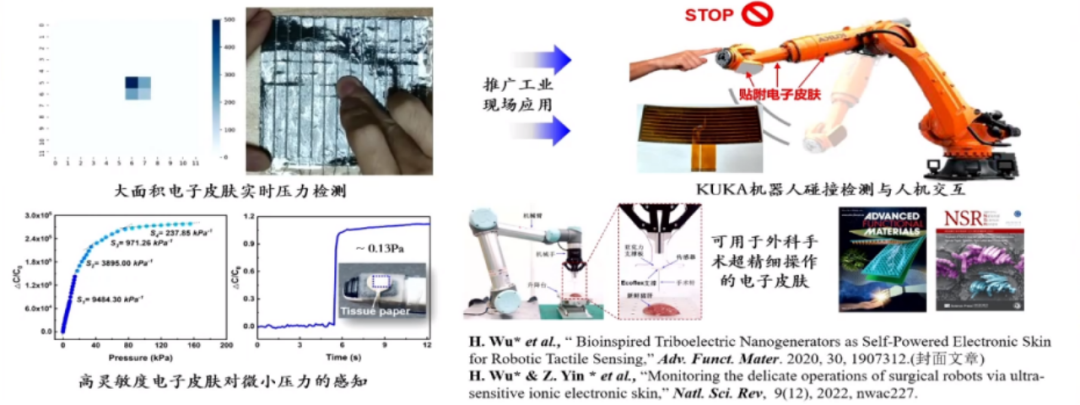
图28 机器人电子皮肤
3.1.2 .2人机交互与人体意图识别
通过同步采集多通道肌电信号和运动信号,能够实现21种手势的识别(图29)且准确率高达97.56%,在肌电控制、人机交互方面有着广泛的应用场景,凭借低延迟的特点,实现对多种智能设备的实时、无线、非接触式控制。
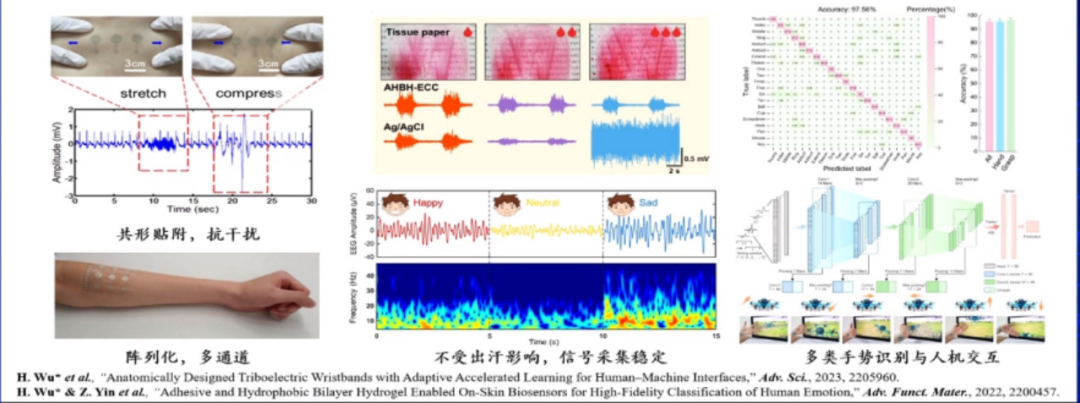
图29 人机交互与人体意图识别
3.1.2.3 柔性混合电子系统应用于人体状态检测
通过开发可贴附于皮肤表面的传感系统,采集生理电、血氧、体温等信号,综合反映人体生理和心理状态,可用于术后游离皮瓣与再植断指血运检测系统、智能水凝胶电极精确诊断周围神经病变(图30)。
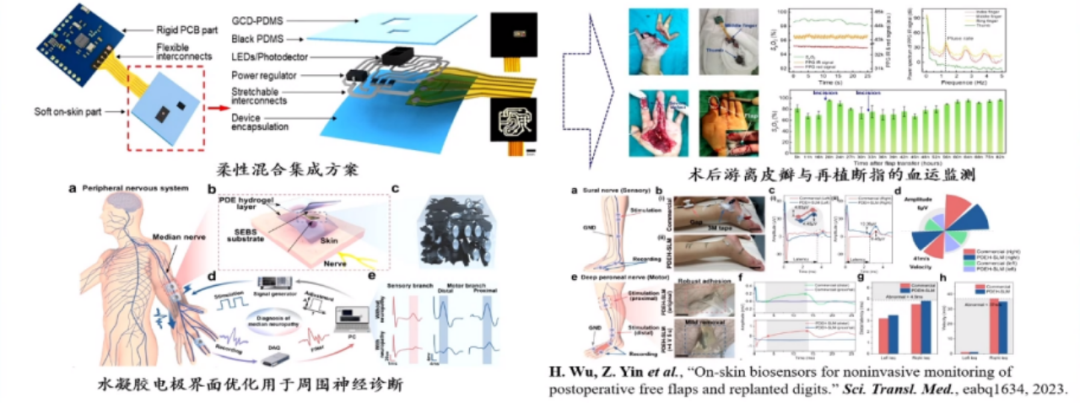
图30 柔性混合电子系统应用于人体状态检测
▍4.人才培养与教育
人才培养是实现创新发展的关键,《“十四五”机器人产业发展规划》提出,“到2025年我国成为全球机器人技术创新策源地、高端制造聚集地和集成应用新高地”,“加强机器人科技人才培养,支持高校和科研院所培养专业技术和复合型高端人才。鼓励校企联合开展产学合作协同育人项目,推行订单培养、现代学徒制等模式,培养产业发展急需人才”。
对此,笔者认为人才的培养与教育应该关注三点内容,第一,共融机器人产业群的跨越发展已推动新工科与新医科的发展与融合(图31);第二,加强基础研究和创新人才培养,将产学研三者结合,多学科融合交叉(STEM+),能够产生聚集效应;第三,要培养多模式(研究型大学/普通高校/职业学校)、多层次(研究生/本科生/专科生/技工)复合型创新人才。
4.1 复合型创新人才的培养
培养复合型创新人才(图32)要注重理想视野、理论技术、实践能力、创新思维等多方面的培养内容。通过学术前沿、学术难题引发学生对于科学研究的兴趣,启发科学研究的思维,同时以教学夯实理论技术基础,积极参与研究项目,训练科研能力,实现不断创新。
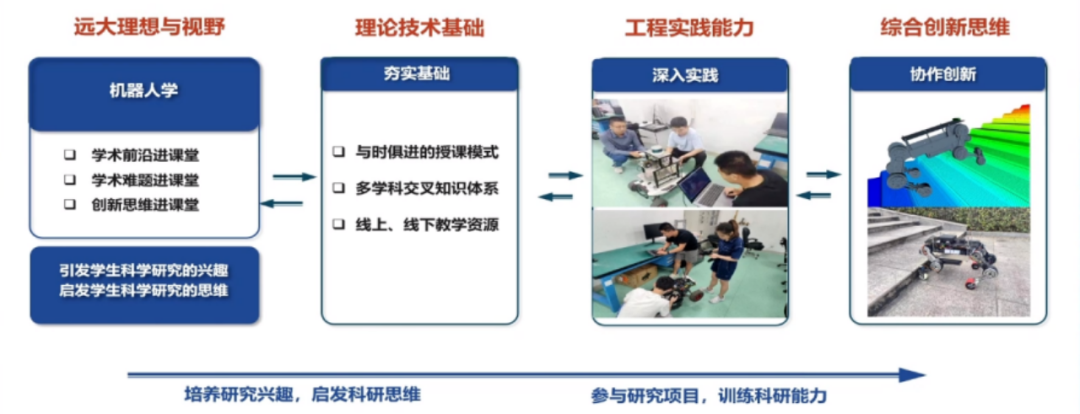
图32 复合型创新人才的培养
4.2 机器人科学的性质与发展
复合型创新人才的培养对于机器人科学的发展同样重要。机器人科学与制造科学一样,是一门工程科学,维纳的控制论和钱学森的工程控制论是工程科学产生的两个重要里程碑。1988年以前,Michael Brady前瞻性的预测机器人科学的九大问题(图33),本世纪以来,共融机器人的发展所提出的科学问题越来越多,越来越广泛,越来越深刻,远远超出人们的想象,已经成为一门内容丰富的工程科学。如今,机器人科学大致可以分为三大部分:CZB、HLK、RJGR,具有与制造科学相似的性质。
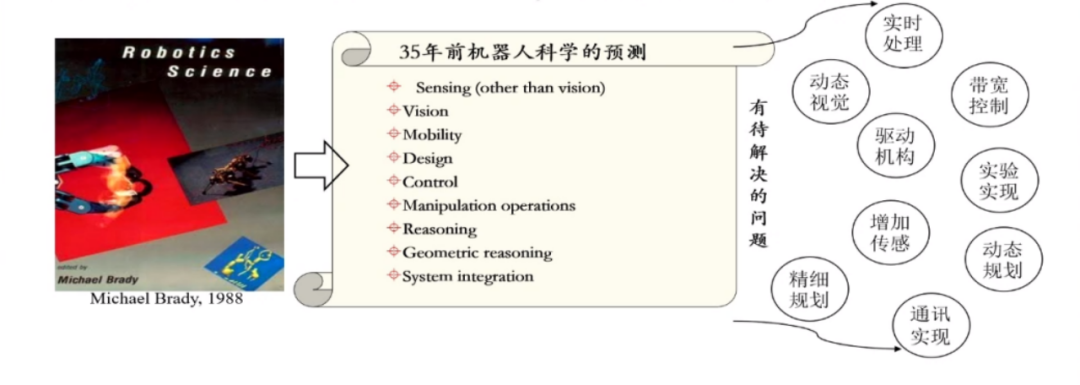
图33 机器人科学的九大问题
随着机器人科学的发展,机器人学教材(图34)建设也取得了巨大的成绩,出现了许多优秀的教材(图35)。笔者认为,一本优秀的教材应该考虑以下几个方面,一是要明确机器人学是一门工程科学,工程科学跟原来的科学不一样,要从数理化、天地生里面找出跟这门工程科学有关的融合在一起;二是要明确对象是共融机器人,包括操作臂类、海陆空类和人机共融类;三是内容要精细;四是教学与科研要实现结合;五是内容要不断更新、与时俱进。
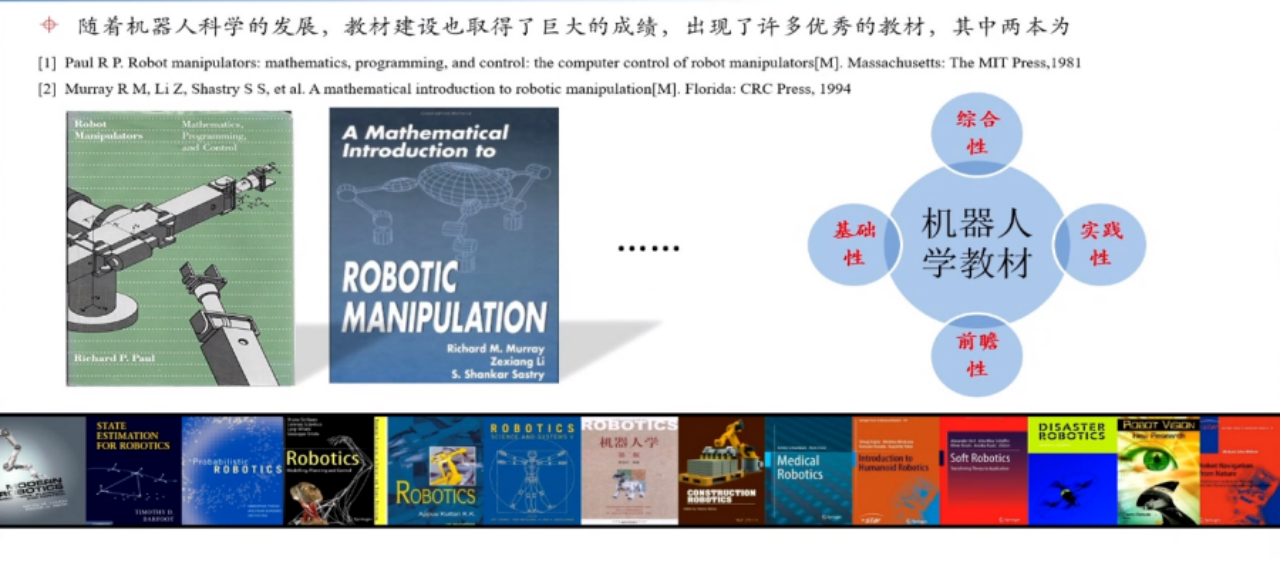
图34 机器人学教材
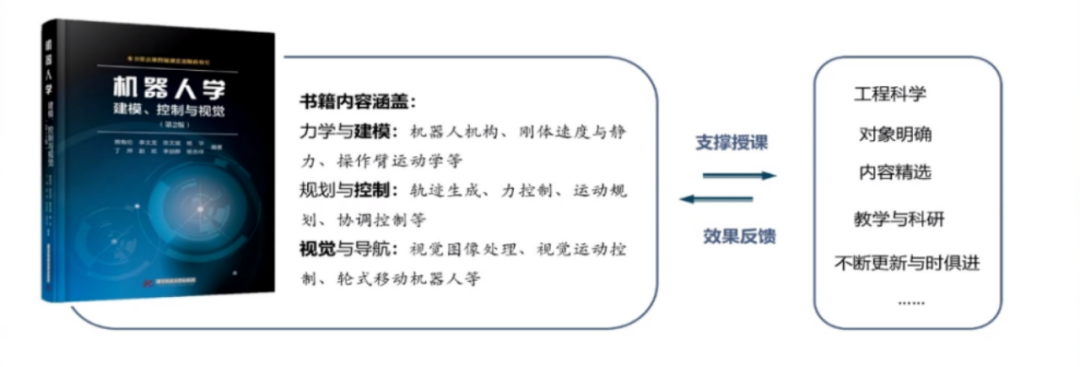
图35 《机器人学:建模、控制与视觉》
教材的优化需要领域专家们凝心聚力、共同讨论、群策群力。近些年,华中科技大学召开了多次关于机器人学教学、教材和实验课的研讨会议(图36),得到了众多机器人领域专家学者的大力帮助和支持。为进一步提高机器人学教学质量,需要推动机器人从选修课到必修课到主干课的转变,同时可以在不同学院进行多学科交叉教学的尝试。
▍5.结束语
综上所述,笔者认为,共融机器人产业群作为实体经济的重要载体以及建设科技强国和制造强国的重要组成部分,要实现其创新发展,必须要加强基础研究,实施人才强国战略;面向国家重大需求,突破关键技术,解决“卡脖子”问题,培养科技领军人才。高等院校作为发现知识和传授知识的场所,如何发现与传授机器人科学这一发展迅速的工程科学的知识,激发创新活力、弘扬创新精神、营造创新文化等问题都值得其关注。各领域要协同发力,建立完整的产业链和创新链;凝心聚力,实现共融机器人产业群的创新发展、跨越发展。
-
机器人
+关注
关注
214文章
31650浏览量
224569 -
工业机器人
+关注
关注
91文章
3557浏览量
98644 -
智能驾驶
+关注
关注
5文章
3073浏览量
51423
原文标题:院士谈共融机器人产业群的创新发展和跨越发展
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
赋能智慧工厂:人形机器人发展趋势及工业应用解决方案
华数机器人参与承办具身智能创新发展大会
骐俊物联共同推动物联网产业创新发展
2026机器人产业创新发展研讨会圆满结束,国创灵梭IntarkDB筑牢产业数字根基

闻泰科技荣膺“2025好公司50”创新发展大奖
华为亮相2025成都机器人和智能制造技术与标准创新发展大会
深兰科技亮相2025浦东新区产业智能化创新发展年度活动
集创北方亮相2025世界显示产业创新发展大会
维信诺亮相2025世界显示产业创新发展大会
大族数控亮相2025电子半导体产业创新发展大会
共绘具身智能未来,ADI携手产业伙伴举行人形机器人媒体分享会

开源鸿蒙驱动机器人与AI产业生态发展,M-Robots OS正式开源




评论