 CW32 PWM输出功能介绍
CW32 PWM输出功能介绍

脉冲宽度调制(PWM),即“Pulse Width Modulation”的缩写,简称脉宽调制,是在数字电路中达到模拟输出效果的一种手段,常见应用电机调速,照明灯调光等。
在MCU中,主要通过定时器单元来时实现PWM输出,以CW32L083VxTx为例,LPTIM,GTIM,ATIM都可以输出PWM信号。
低功耗寄存器(LPTIM)中,LPTIM 在连续模式下可以输出 PWM 波,在单次模式下可以输出单脉冲波或单次置位波形。连续模式下输出PWM波的周期和占空比由自动重载寄存器 LPTIM_ARR 和比较寄存器 LPTIM_CMP决定。
通用定时器(GTIM)中,通过设置输出比较功能,可以产生一个由重载寄存器 GTIMx_ARR 确定频率、由比较捕获寄存器 GTIMx_CCRy 确定占空比的PWM信号。每个GTIM对应有4个GTIMx_CCRy寄存器,可输出4路PWM信号。向 GTIMx_CCMR 寄存器中的 CCyM 位写入 0xE 或 0xF,能够独立地控制每个 CHy 输出PWM信号的波形。
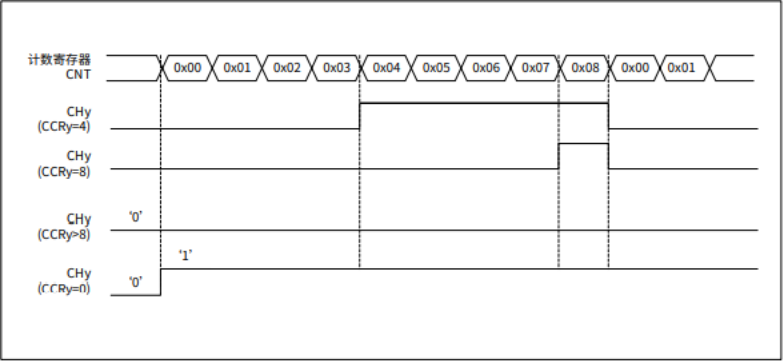
●设置 GTIMx_CMMR.CCyM 为 0xE,当 GTIMx_CNT >= GTIMx_CCRy 时,CHy 通道输出高电平,否则输出低电平。如果 GTIMx_CCRy 中的比较值大于重载寄存器 GTIMx_ARR 的值,则 CHy 通道输出保持为低电平;如果 GTIMx_CCRy 中的比较值为 0,则 CHy 通道输出保持为高电平。
●设置 GTIMx_CMMR.CCyM 为 0xF,当 GTIMx_CNT < GTIMx_CCRy 时,CHy 通道输出高电平,否则输出低电平。如果 GTIMx_CCRy 中的比较值大于重载寄存器 GTIMx_ARR 的值,则 CHy 通道输出保持为高电平;如果 GTIMx_CCRy 中的比较值为 0,则 CHy 通道输出保持为低电平。
下图是 GTIMx_CMMR.CCyM 为 0xE、GTIMx_ARR 为 0x08 时PWM波形实例图:
高级定时器(ATIM)中有独立PWM输出模式和互补PWM输出两种模式。
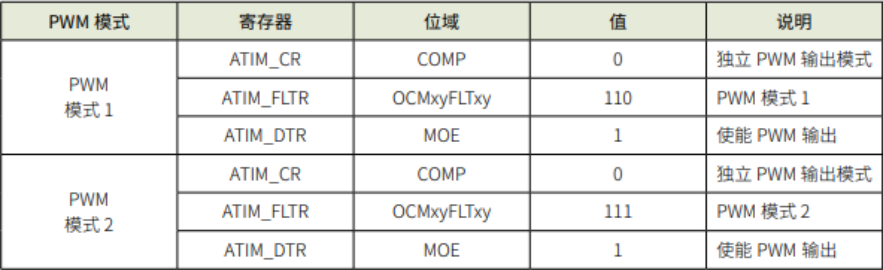
●独立PWM模式可独立输出6路PWM,PWM的周期和占空比由重载寄存器ATIM_ARR和比较捕获寄存器ATIM_CHxCCRy寄存器确定。PWM 输出模式需要设置控制寄存器 ATIM_CR、滤波寄存器 ATIM_FLTR 和死区寄存器 ATIM_DTR,如下表所示:
另外比较通道 CHx 的 A 路可通过控制寄存器 ATIM_CR 的 PWM2S 位域配置为单点比较或双点比较 工作方式。在单点比较方式下,使用比较捕获寄存器 ATIM_CHxCCRA 控制比较输出;在双点比较方式下,使用 比较捕获寄存器 ATIM_CHxCCRA 和 ATIM_CHxCCRB 控制比较输出。比较通道的 B 路只能使用单点比较,由比较 捕获寄存器 ATIM_CHxCCRB 控制比较输出。
●互补PWM模式可输出3对互补输出的PWM波形,通常用于电机控制。设置控制寄存器 ATIM_CR 的 COMP 位域为 1 选择互补 PWM 输出模式,比较输出通道 CHxA 与通道 CHxB 产生一 对互补 PWM。在互补 PWM 输出模式下,通道 CHx 的 A 路控制输出信号, B 路比较捕获寄存器 CHxCCRB 不再控制 CHxB 输出,但仍可用作内部控制,比如触发 ADC 或 DMA。
另外互补 PWM 输出模式,也可通过控制寄存器 ATIM_CR 的 PWM2S 位域选择单点比较或双点比较工作方式:单点比 较时使用比较捕获寄存器 ATIM_CHxCCRA 控制比较输出;双点比较时使用比较捕获寄存器 ATIM_CHxCCRA 和 ATIM_CHxCCRB 控制比较输出。
实例演示
以CW32L083VxTx的通用定时器GTIM1为例,实现PWM输出例程:GTIM1的CH3通道(PB08)输出周期为500uS,占空比递增递减循环改变的PWM信号。
1.配置不同的系统时钟。
voidRCC_Configuration(void)
{
/*0.HSI使能并校准*/
RCC_HSI_Enable(RCC_HSIOSC_DIV6);
/*1.设置HCLK和PCLK的分频系数*/
RCC_HCLKPRS_Config(RCC_HCLK_DIV1);
RCC_PCLKPRS_Config(RCC_PCLK_DIV1);
/*2.使能PLL,通过HSI倍频到48MHz*/
RCC_PLL_Enable(RCC_PLLSOURCE_HSI,8000000,6);
//PLL输出频率48MHz
RCC_PLL_OUT();
///< 当使用的时钟源HCLK大于24M,小于等于48MHz:设置FLASH 读等待周期为2 cycle
///< 当使用的时钟源HCLK大于48M,小于等于72MHz:设置FLASH 读等待周期为3 cycle
__RCC_FLASH_CLK_ENABLE();
FLASH_SetLatency(FLASH_Latency_2);
/* 3. 时钟切换到PLL */
RCC_SysClk_Switch(RCC_SYSCLKSRC_PLL);
RCC_SystemCoreClockUpdate(48000000);
}
2.配置GPIO口
voidGPIO_Configuration(void)
{
/*PB08作为GTIM1的CH3PWM输出*/
__RCC_GPIOB_CLK_ENABLE();
PB08_AFx_GTIM1CH3();
PB08_DIGTAL_ENABLE();
PB08_DIR_OUTPUT();
PB08_PUSHPULL_ENABLE();
}
3.配置中断使能
voidNVIC_Configuration(void)
{
__disable_irq();
NVIC_EnableIRQ(GTIM1_IRQn);
__enable_irq();
}
4.配置GTIM为PWM输出功能
voidPWM_OutputConfig(void)
{
GTIM_InitTypeDefGTIM_InitStruct={0};
__RCC_GTIM1_CLK_ENABLE();
GTIM_InitStruct.Mode=GTIM_MODE_TIME;/*!< GTIM的模式选择。*/
GTIM_InitStruct.OneShotMode = GTIM_COUNT_CONTINUE;
/*!< GTIM的单次/连续计数模式选择。*/
GTIM_InitStruct.Prescaler = GTIM_PRESCALER_DIV16;
/*!< GTIM的预分频系数。*/
// DCLK = PCLK / 16 = 48MHz/16 = 3MHz
GTIM_InitStruct.ReloadValue = Period * 3 - 1; /*!< GTIM的重载值。*/
//ARR设置为1499
GTIM_InitStruct.ToggleOutState = DISABLE;
GTIM_TimeBaseInit(CW_GTIM1, GTIM_InitStruct);
//GTIM的基础参数初始化
GTIM_OCInit(CW_GTIM1, GTIM_CHANNEL3, GTIM_OC_OUTPUT_PWM_HIGH);
//比较输出功能初始化
GTIM_SetCompare3(CW_GTIM1, PosWidth);
GTIM_ITConfig(CW_GTIM1, GTIM_IT_OV, ENABLE);
GTIM_Cmd(CW_GTIM1, ENABLE);// GTIM使能
}
5.GTIM标志清零函数
voidGTIM_ClearITPendingBit(GTIM_TypeDef*GTIMx,uint32_tGTIM_IT)
{
GTIMx->ICR=~GTIM_IT;
}
6.GTIM 比较值设置函数
voidGTIM_SetCompare3(GTIM_TypeDef*GTIMx,uint32_tValue)
{
GTIMx->CCR3=0x0000FFFF Value;
}
7.GTIM中断处理函数
voidGTIM1_IRQHandler(void)
{
/*USERCODEBEGIN*/
//中断每500us进入一次,每50ms改变一次PosWidth
staticuint16_tTimeCnt=0;
GTIM_ClearITPendingBit(CW_GTIM1,GTIM_IT_OV);
if(TimeCnt++>=100)//50ms
{
TimeCnt=0;
if(Dir)
{
PosWidth+=15;//5us
}
else
{
PosWidth-=15;
}
if(PosWidth>=Period*3)
{
Dir=0;
}
if(0==PosWidth)
{
Dir=1;
}
GTIM_SetCompare3(CW_GTIM1,PosWidth);
}
/*USERCODEEND*/
}
8.主函数
uint32_tPeriod=500;//周期,单位us
uint32_tPosWidth=0;//正脉宽,单位us
uint8_tDir=1;//计数方向1增加,0减少
int32_tmain(void)
{
/*系统时钟配置*/
RCC_Configuration();
/*GPIO配置*/
GPIO_Configuration();
PWM_OutputConfig();
/*NVIC配置*/
NVIC_Configuration();
while(1)
{
/*中断服务程序见GTIM1_IRQHandler()*/
}
9.实验演示
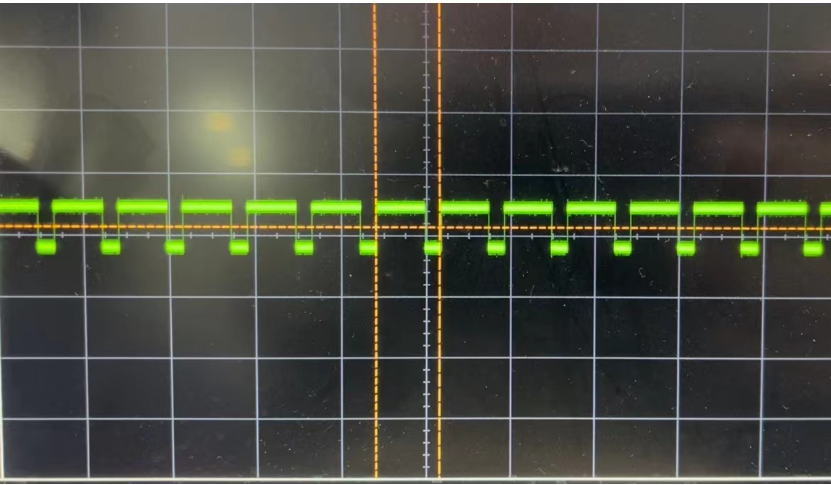
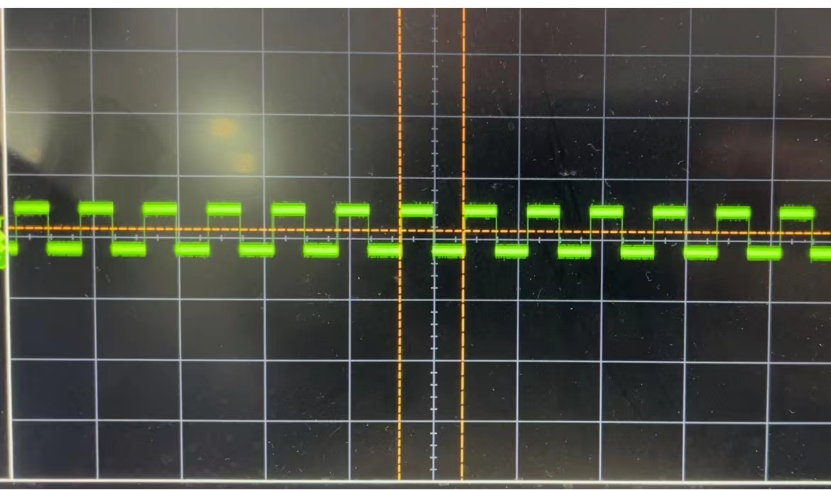
系统时钟由HSI提供,通过PLL倍频到48MHz。GTIM1经16分频后,以3MHz的频率计数,ARR设置为1499,GTIM1的溢出周期为500us。GTIM1每500us进入一次中断,每50ms改变一次CH3的CCR寄存器的值,即改变PWM的正脉宽,步长为5us,先递增到ARR,然后递减到0,如此反复。通过示波器图像显示,PB08处的信号波的占空比随时间进行周期性变化。截取2个波形如下:
来源:武汉芯源半导体
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理
审核编辑 黄宇
-
寄存器
+关注
关注
31文章
5590浏览量
129077 -
PWM
+关注
关注
116文章
5847浏览量
223830 -
定时器
+关注
关注
23文章
3361浏览量
121751
发布评论请先 登录

请问CW32的pwm移相功能是只有PWM通道1有还是全部都可以配置?
CW32的PWM输出会受电机干扰突然停波,怎么解决?
CW32定时器及中断介绍
如何基于CW32系列MCU实现VBAT功能
cw32和stm32的区别
cw32和gd32的区别

CW32单片机在智能马桶的应用介绍






 工商网监
工商网监
评论