 一文浅谈FlexCAN OTA
一文浅谈FlexCAN OTA

1、简介
FlexCAN OTA 是由灵动提供的一种基于 UDS 协议使用 CAN 总线实现对 MCU 的 App 固件更新的解决方案。该解决方案的软件部分主要由:Bootloader、App和PC Tool三部分构成,硬件部分如图 1 所示。
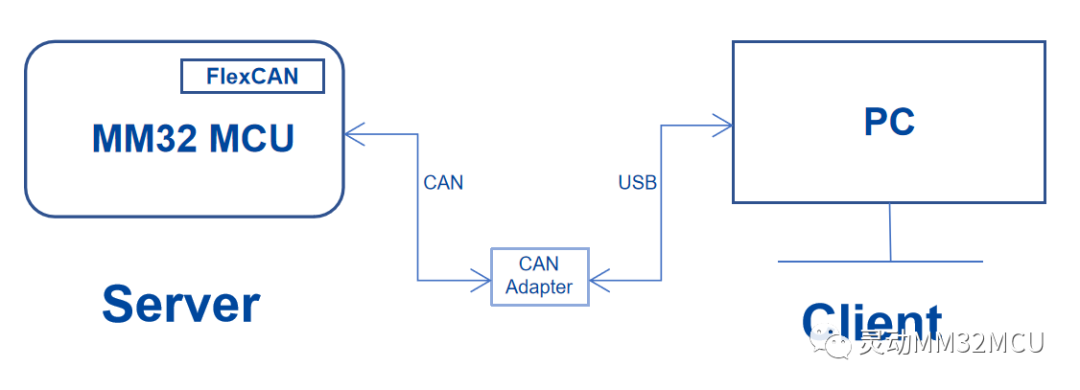
图 1 MCU 与 PC 机交互示意图
1.1 关键特性
基于 UDS(ISO14229) 标准
基于 CAN(ISO11891-1) 标准
具备对 App 固件 CRC 完整性校验功能
使用主机上传 Flash driver 到 MCU
在 Bootloader 中进行 App 有效性检查
提供用于验证 App 固件更新的 PC 端上位机工具
1.2 什么是 FlexCAN ?
CAN 是控制器域网 (Controller Area Network, CAN) 的简称,是一种功能丰富的车用总线标准,被设计用于在不需要主机(Host)的情况下,允许网络上的单芯片和仪器相互通信。是由研发和生产汽车电子产品著称的德国 BOSCH 公司开发,并最终成为国际标准(ISO11898),是国际上应用最广泛的现场总线之一。
FlexCAN 是 CAN 协议的一个高完成度版本。以灵动 MM32F0140 系列 MCU 内嵌的 FlexCAN 为例,其符合 ISO 11898-1 标准,支持 CAN 2.0B 版本协议,位速率高达 1 Mbps,具有非常灵活的用于传输和接收的邮箱系统,可以接收和发送 11 位标识符的标准帧,也可以接收和发送 29 位标识符的扩展帧,主要被设计用作车载串行总线,可满足实时处理、车辆在电磁干扰环境下的可靠操作、成本效益、带宽等要求。
1.3 什么是 UDS ?
UDS(Unified Diagnostic Services,统一诊断服务)是一种用于汽车电子控制器 ECU (Electronic Control Units) 环境下的一种诊断通信协议,可实现诊断、固件更新、日常测试等功能,在 ISO 14229 中规定了其实现标准。
在本实例中,UDS 通信是在客户端-服务端关系中执行的。客户端是上位机下载软件运行于 PC 机,服务端是带有FlexCAN IP模块的 MM32 MCU。例如,将 CAN 总线接口连接到 MCU,并将 UDS 请求发送到 MCU。当 MCU 支持 UDS 服务时,它将根据客户端发出的请求做出相应的响应。
1.4 为什么用 Bootloader ?
对于 MCU 而言,如果程序内置有基于FlexCAN 的 Bootloader,则每次更新 MCU 的固件则不需要拆开外壳也不必再使用烧录器进行烧录,而可直接通过 CAN 总线来更新程序,这样更方便也更安全,而且随着智能化的普及,甚至可以对 MCU 进行远程升级。Bootloader 程序结构对比如图 2 所示:
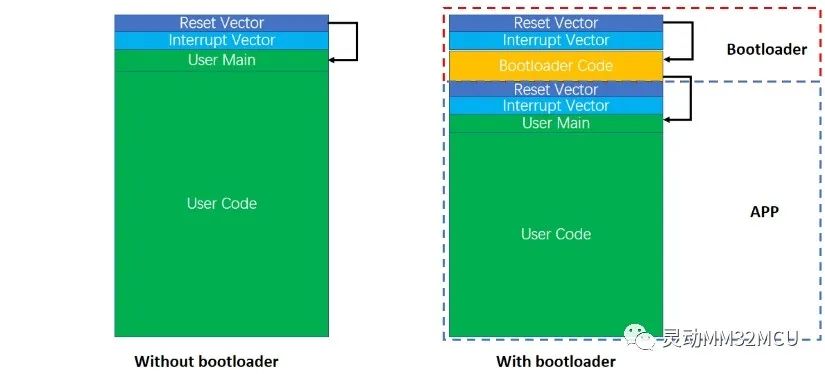
图 2 程序结构对比框图
1.5 为什么基于 UDS ?
为了规范 Bootloader 的全过程,通过使用成熟的平台进而提供高质量 Bootloader。因 UDS 在设计时考虑了 Bootloader 的需求,并为 Bootloader 提供了相关服务以供使用,比如诊断会话控制、ECU 重置、读取数据、请求下载、传输数据、请求传输退出等,可以实现更高效和可靠的刷写功能。故主机厂普遍会要求在 UDS 规范的基础上完成 Bootloader 功能。
1.6 用到了哪些 UDS 服务?
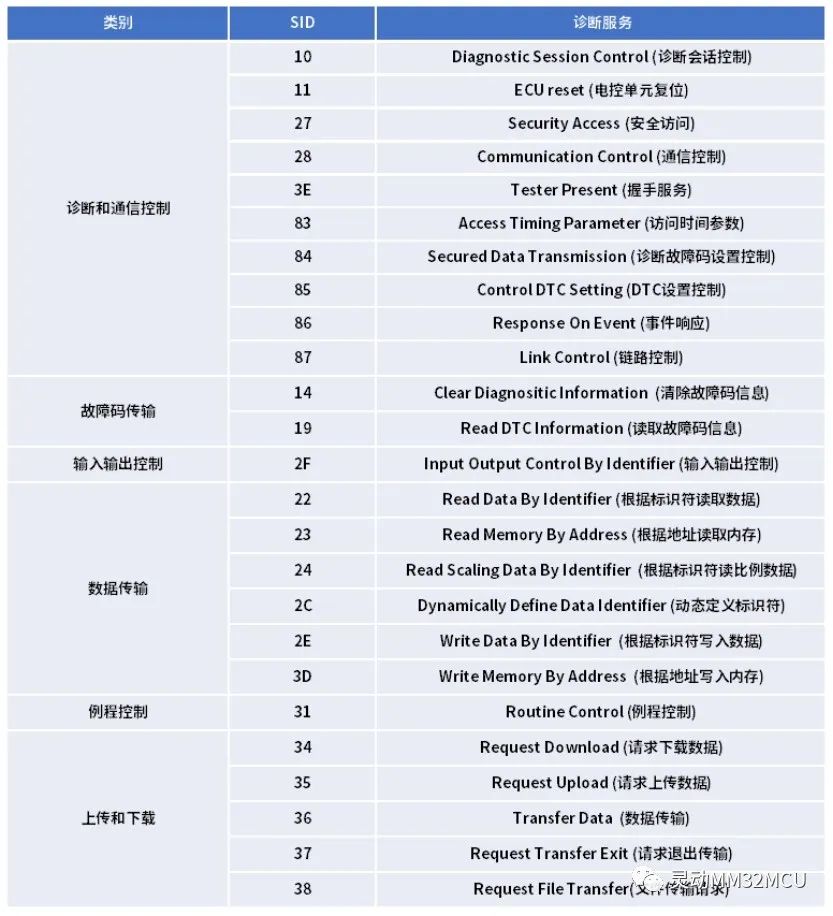
在 Bootloader 中,使用到 UDS 的 $10、$11、$27 和 $3E 基础诊断服务,$22、$2E 读写 DID 服务,$31、$34、$36 和 $37 固件数据传输相关服务。UDS 服务概览如表 1-1 所示:
表 1-1
2、Bootloader
Bootloader 是一段允许在不使用烧录器的情况下更新App固件的代码,基于灵动 MindSDK 实现的 Bootloader 样例工程支持 MDK、IAR 和 ARMGCC 三种工具链进行开发。在实际的使用过程中只需要在第一次使用时通过烧录器将 Bootloader 烧录进 MCU,后续的 App 都可以通过使用基于 CAN 总线的 UDS协议完成固件更新。
2.1 Bootloader 功能特性
支持 Service 27,用户可根据自身需求添加安全访问算法。
支持 Service 22 和 Service 2E,用户可以根据自身需求添加策略,进行信息读出与存储。
外置 Flash driver,使用时通过外部 PC 或后台将 Flash driver 加载到 MCU 的 RAM 中进行安全的 Flash 擦写操作。
提供看门狗监控功能,用户可根据自身需求选择性开启看门狗监控程序。
2.2 客制化修改说明
修改诊断 ID
可在样例工程的 board/FblHalCan.h 中修改诊断 ID 的值。
指定数据填充值
当需要发送的数据长度不满足 8 字节长度时,通过宏定义可以更改填充,用户可以在样例工程的 board/FblHalCan.h 中指定填充值。
使能看门狗
用户可以在样例工程的 board/FblMacros.h 中打开宏开关 WDG_ENABLE 使能看门狗服务,并且实现 ResetWdg 操作。
安全访问算法接口
Bootloader中支持 27 Service,用户可在样例工程的 board/FblMacros.h 中使能宏开关 ENABLE_SECURITY_ALGORITHM_VERIFICATION 根据自身需求添加安全访问算法。
2.3 Flash driver 介绍
什么是Flash driver?
在OTA程序升级过程中,发送App可执行文件之前,向底层先发送一段二进制文件,这段代码实现了对MCU片内 Flash 的擦写功能,称为 Flash driver。
Flash driver存在的意义
在车载ECU控制器中,为了安全考虑,会尽可能的避免在代码中固化有对flash进行擦写操作,主要为了避免在程序跑飞时误调用该部分代码,使软件代码部分受到破坏。
Flash driver的实现方式
a.将flash driver固化在底层flash中,在运行的时候将flash中的flash driver拷贝到ram中来运行,这是比较传统的方式,但是避免不了提到的安全性问题。
b.将flash driver这段代码保存在PC端或后台,在每次执行OTA升级前,将这段代码先发送给MCU,这样可以避免方式 a 中提到的安全性问题。
3、App
基于灵动 MindSDK 提供的 flexcan_ota_app 样例工程进行开发和生成用于更新的 HEX 格式 App 固件生成,无需任何适配操作即可生成用于 OTA 升级的 App 固件。
3.1 使用说明
将 Bootloader 通过下载器下载到 MCU 中后,可通过提供的 PC Tool 来刷写生成的固件,通过 PC Tool 下载成功后,一方面 PC 终端会有下载成功提示,另一方面也可以查看开发板上对应固件实现的功能是否开始执行。
关于 App 固件可从提供的 flexcan_ota_app 样例工程编译源码并将生成“.hex”格式的 App 固件进行加载。
3.2 App 设计规范
App 与 Bootloader 存放在 MCU 的同一块 Flash 的两个不同区域中,为保证两个软件的正常使用,App 设计遵循表 2-1 和表 2-2 所述规范。
表 2-1
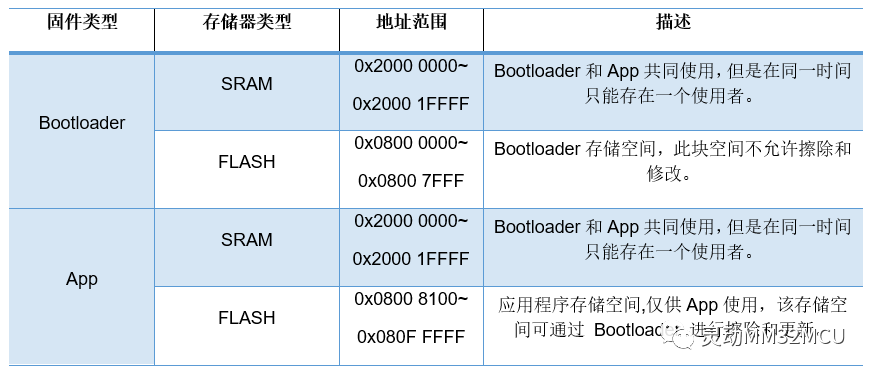
表 2-2

4、PC Tool
Flexcan OTA PC Tool 是用于验证灵动 MindSDK 中提供的 FlexCAN OTA 解决方案的简易 PC 端上位机工具。
4.1 功能特性
支持 CAN 通信速率自定义
支持 Win10 操作系统下运行
支持默认参数直接运行和命令行下带参数运行
支持直接加载 MDK 和 IAR 工具链下生成的 HEX 格式文件
基于 Python 使用 python-udsoncan 开发,可根据不同需求灵活进行二次开发
4.2 开发环境
本工具在 Win10 平台使用 Python 进行开发,基于 UDS 使用 CAN 协议,支持 PEAK CAN卡与 MCU 进行通讯。
4.3 使用说明
请按照如下步骤进行操作:
a、下载 Bootloader 到 MCU
将提供的 flexcan_ota_bootloader 样例工程编译并下载到开发板中。
b、安装 CAN 卡驱动并连接 MCU
在这里我们用到的是PCAN-USB,下载并安装驱动(https://peak-system.com.cn/driver/) ,并将 PCAN-USB 和开发板上的 CAN 收发器通过双绞线连接以及通过 USB 和 PC 机连接。
c、运行 FlexCAN OTA PC Tool
方式一:按照默认参数直接运行
直接双击 flexcan_ota_pc_tool_v1.0.exe,如图 3 所示,默认将按照 500Kbps 的比特率进行 CAN 通信,Flash_driver 文件的加载地址为当前路径下的文件(./flash_driver.hex), App 文件的加载路径为当前路径下文件(./app.hex)。
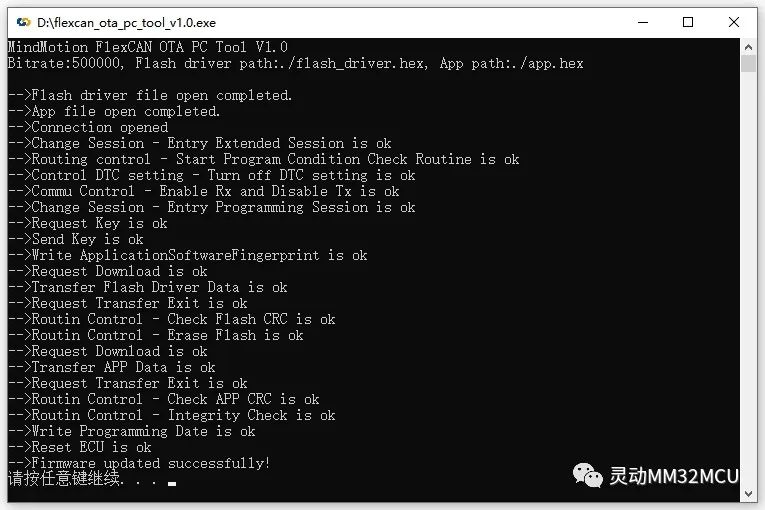
图 3
方式二:按照指定参数运行
在 Win10 平台下启动命令行窗口并切换到当前路径下,获取帮助如图4所示,输入如下指令并按回车键:
flexcan_ota_pc_tool_v1.0.exe-h
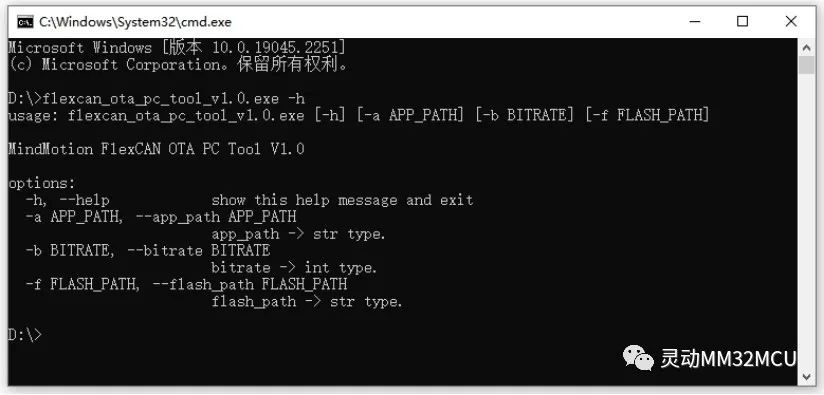
图 4
按照指定参数运行如图 5 所示,输入如下指令并按回车键:flexcan_ota_pc_tool_v1.0.exe-b500000-f"./flash_driver.hex"-a"./app.hex"
其中 flash_driver.hex 文件为用于安全地擦写片内 flash 的代码,在每次 OTA 更新中复用即可。
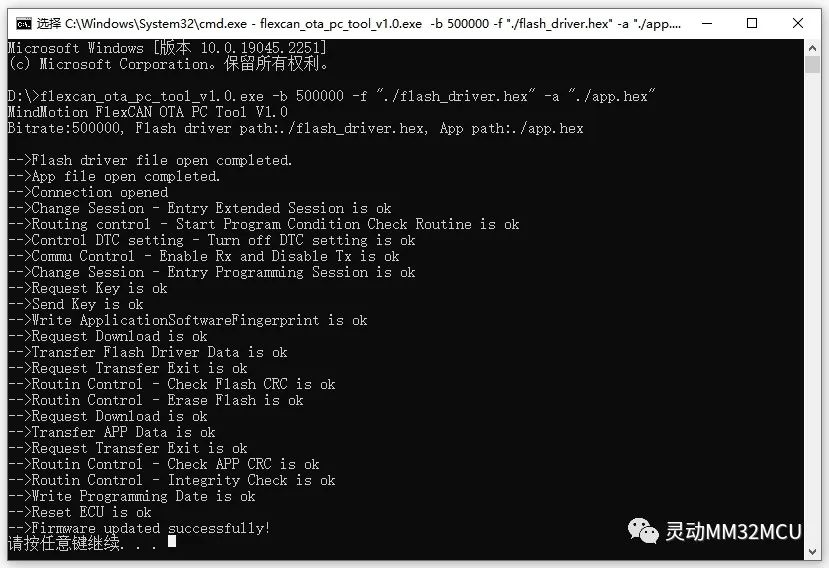
图 5
d、结束
等待 FlexCAN OTA 固件更新流程结束,并按任意按键退出。
5、注意事项
FlexCAN OTA Tool 为用于验证基于 UDS 使用 CAN 协议进行 App 固件更新的上位机工具,PC 端使用 PEAK-CAN 与 MCU 通讯,仅支持在 Win 10 操作系统下运行, 且用于功能性验证,若遇到软件闪退等问题请重启该软件并复位 MCU。该工具可根据开发者项目需求进行二次开发。
以上介绍是基于MM32F0140 系列 MCU 进行介绍和示例演示,相关源码请访问灵动官网进行获取:
01)进入灵动官网(www.mm32mcu.com)
02)打开“产品”菜单下 MM32F0140 页面,浏览“文档”列表。
03)在“应用笔记”中下载“AN0035_FlexCAN_OTA”文档,获取源码。

6、参考文献
《ISO11898-1》
《ISO14229》
来源:灵动MM32MCU
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理
审核编辑 黄宇
-
CAN
+关注
关注
58文章
3012浏览量
471474 -
总线
+关注
关注
10文章
3014浏览量
91307 -
OTA
+关注
关注
7文章
623浏览量
37961
发布评论请先 登录

使用ymodem_ota时如何更换串口?
解决方案 | 云管端一体化OTA HIL测试解决方案

AS32S601在轨重构(OTA)方案的优化与分析

技术笔记 | Ubuntu 系统 OTA 升级全流程详解

BlueNRG-1 OTA卡在PROGRAMMING,进度一直为0是怎么回事?
WICED 的OTA2如何启动?
自动驾驶汽车需要频繁OTA更新吗?
请问如何使S32K312 FLEXCAN的以下区域在写入后读取与写入不同?
IMX8ulp调试CAN通信功能,在dtb文件中找不到flexCAN设备节点怎么解决?
一文解锁OTA远程升级方案!基于RK3562全国产平台

浅谈车规MCU (MGEQ1C064) OTA升级
OTA软件升级管理系统

【OTA升级】无需数据线,一条命令即可完成固件升级!






 工商网监
工商网监
评论