 离心泵多参考坐标系运动仿真讲解
离心泵多参考坐标系运动仿真讲解

作者 |孙一凡 仿真秀优秀讲师
首发 |仿真秀App
导读:技术知识有个特点,很难忽悠人,真伪容易验证,而且和影视作品一样,具有一次消费性。网络上任何分享的技术知识,对于第一个研究者来说,一定是薅着头发测试研究出来,只不过有些流传广了,多个渠道都能免费获得,接受的人也就觉得这个知识点很无所谓了,没啥价值。
网上免费的东西很多很多,付费的也很多,不妨找一个自己信的过的大佬,先看看他免费分享的内容,再看看他付费的内容,就会发现一个通性问题:耶呵!讲的内容差这么多呢!人非圣人,任何人都避免不了俗气,当年圣人孔子带学生一样要收学费。那个技术大佬背后没有房贷车贷?没有父母孩子?大佬的学习过程,也是熬夜薅头发学习收集技术资料,才形成了完成的专题课程。
一、写在文前
对于爱好钻研的人来说,买几本书多收集点案例,熬夜掉把头发,一般技术问题大概率都是能自行解决的,而且这样学习效果深刻,有助于自己计算模型的进一步调整。问题是一个软件技术专题,怎么也得有几十个技术点吧?这要一个一个的研究,时间成本先放一边,茂密的头发怕是保不住了,额头锃光瓦亮的年轻人不一定是皇阿哥,还有可能是众多博士和程序员们。
付费课程自然也有良莠之分,每个课程都是作者收集资料案例、总结输出的结果,技术内容全面性是可以保障的。购买课程后要求课程内容贴合自己的实际项目,这本身就是不合理要求,毕竟课程本身是针对一般普通工程问题的。想贴合自身项目,直接联系作者做项目咨询就行了,只要费用符合要求,任何大佬都能请的动。
二、离心泵多参考坐标系运动仿真
比如这样一个案例,离心泵多参考坐标系运动设置案例,官方帮助文档的案例,任何人都能按照操作步骤做出来,但是涉及的各个技术点,只有系统全面学习了整个动网格专题,才能更好的理解各个步骤,进而更好的处理自己模型的问题。下面就着这个官方案例的具体详细操作过程,看一下涉及的问题。
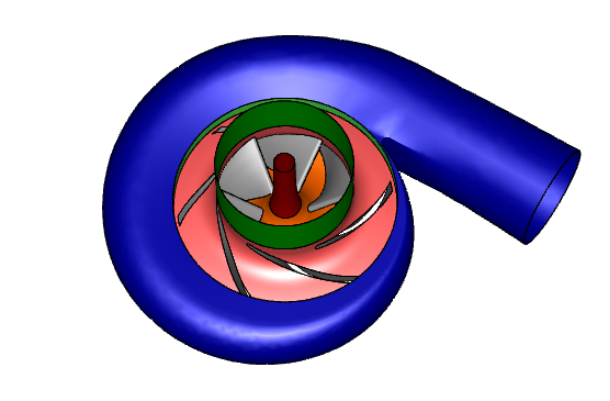
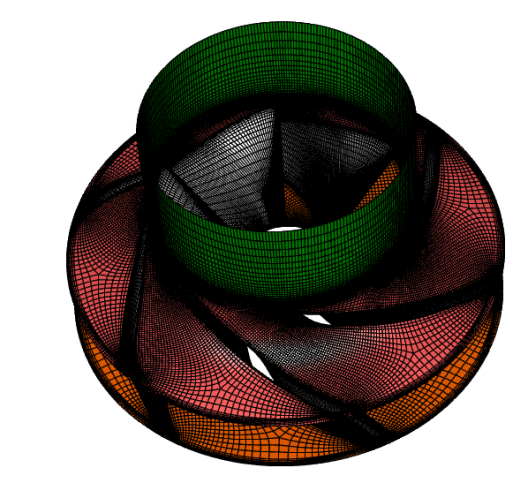
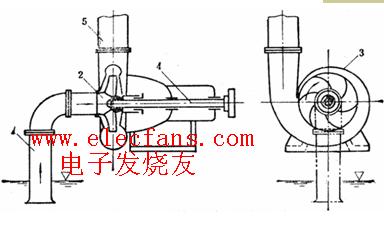
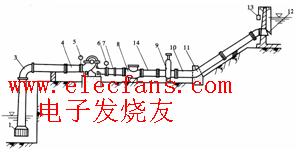
几何模型及内部结构如图所示。
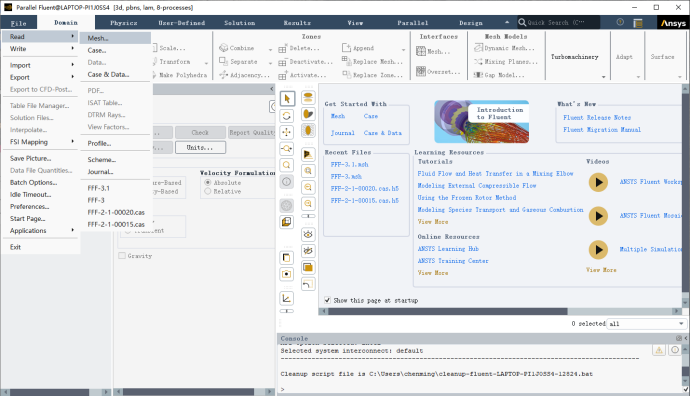
“file”“read”“mesh”读入需要的几何网格模型。
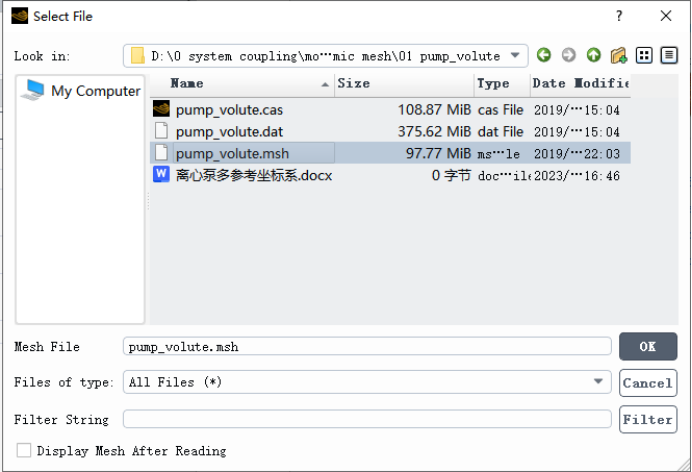
选择目录中的“pump_volute.mesh”文件,点击确定。
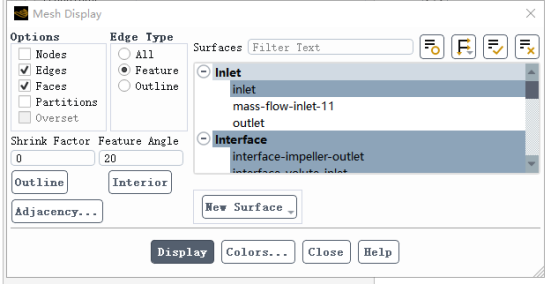
点击“Task Page”面板中的“display”按键,打开“mesh display”对话框,“options”选项中选择显示类型。“edges”显示网格,“faces”显示几何面,一般都选择上。
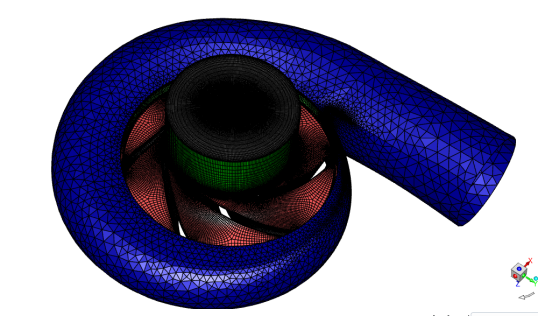
网格模型如图所示。
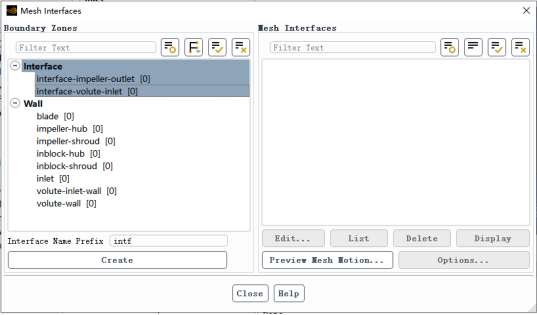
点击模型树中的“mesh interfaces”,使用“mesh interfaces”对内部旋转域和外部静止域之间创建交界面,以便内部流体能够互相识别交换介质。该窗口只有“create”按钮,没有“manual create”选项,如果做流固耦合、循环对称等交界面设置无法完成,需要先使用命令把“manual create”选项打开。
这个问题,百度也能解决,但是捣鼓来捣鼓去可能一个小时就耗费了,但是相关课程内,可能就是一分钟就介绍完了,说难也不难的问题,只是占用时间而已。
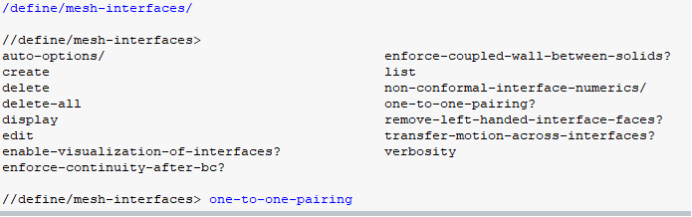
命令查询窗口直接输入“interfaces”后,会筛选出可用相关命令形成选择列表,选择“define/mesh-interfaces”,直接在命令窗口中回车,则该命令下可用的其他命令都会显示在命令窗口中,选择复制粘贴“one-to-pairing”命令。

命令窗口提示是否使用默认的one-to-one interface 创建方法?输入no回车确认,则修改了交界面创建方法。英文输入q命令菜单返回,多输入几次返回初始命令窗口状态。
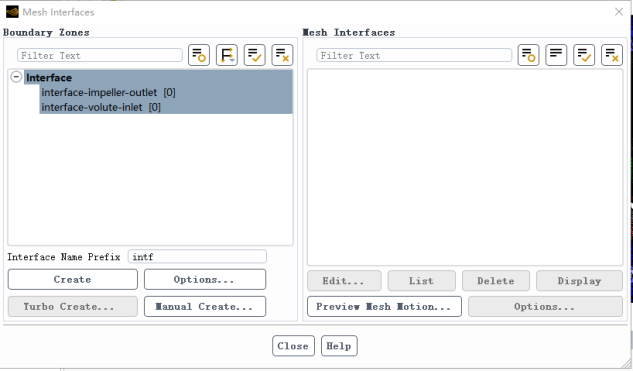
再次打开“mesh interfaces”窗口,“manual create”等按钮出现在窗口中。
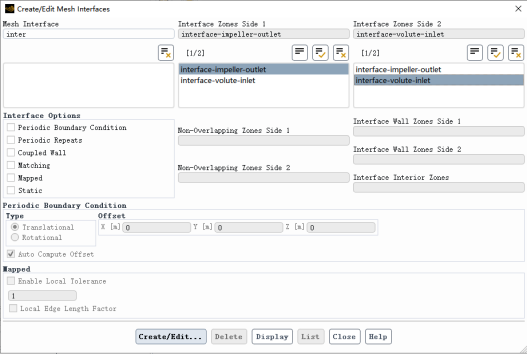
打开“create/edit mesh interfaces”窗口,分别选择“interface zone side 1”“interface zone side 2”中的两个交界面,点击创建一组新的交界面。
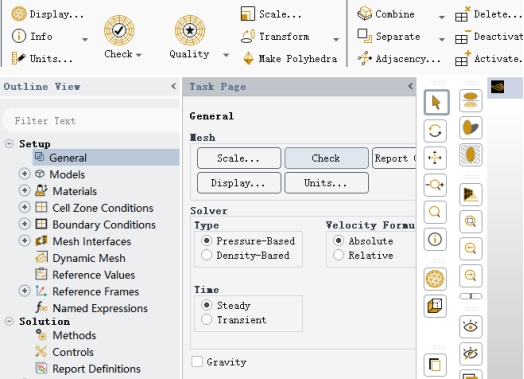
点击“check”检查模型网格,确保网格没有负体积,检查没有接触、边界等错误信息
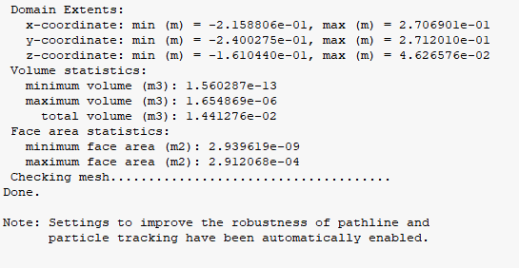
信息窗口显示信息。
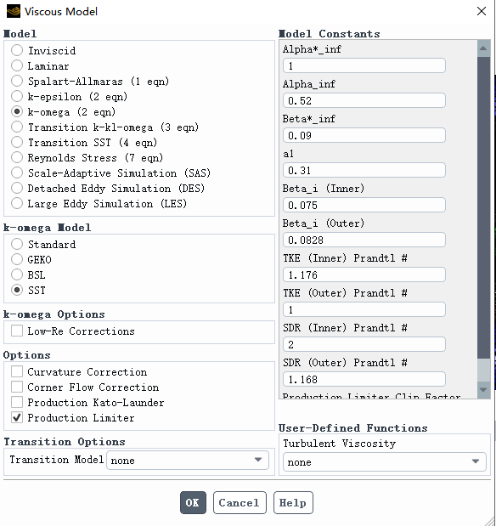
双击模型树“models”“viscous”设置湍流模型。SST k-omega旋转机械中最为常用的湍流模型,其他使用默认选择,确定。
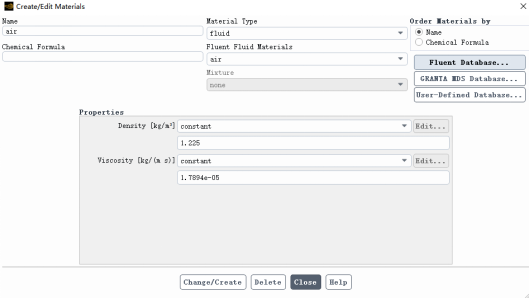
点击模型树“materials”,双击列表项“air”,点击对话框中的“Fluent database”打开自带的材料数据库。
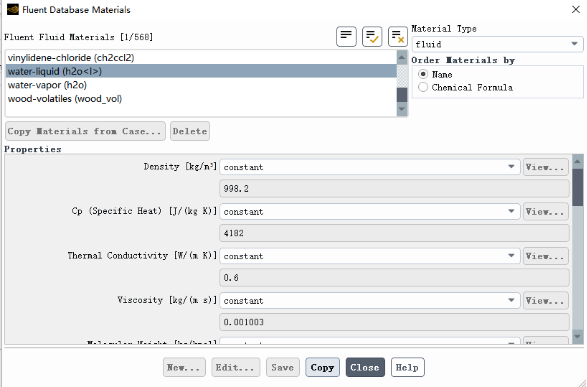
滚动“Fluent fluid materials”窗口进度条到最末端,默认按照字母排序,所以water排在最后面几个里边。也可以通过对话框中的“order materials by”修改为使用化学式排序“chemical formulate”。
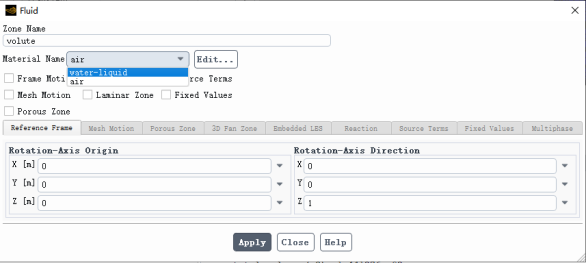
双击模型树“cell zone conditions”“fluid”下的“impeller”和“volute”对内外流域设置材料属性,均设置为“water-liquid”。
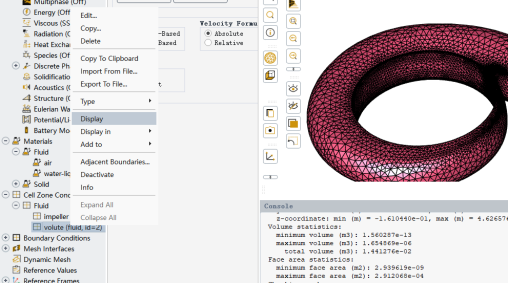
内流域为设置旋转区域,可以自在“impeller”和“volute”名字上直接右击选择“display”,则图形显示窗口中仅显示该部件。Fluent中点击部件右击,只能显示某个部件,没有隐藏某个部件或者全选,可以使用“add to”把其他部件显示到图形窗口中。使用“task page”中的“display”也可以显示其部件,看着和部件显示一样的效果,但是“mesh display”中显示的是各个面的网格。
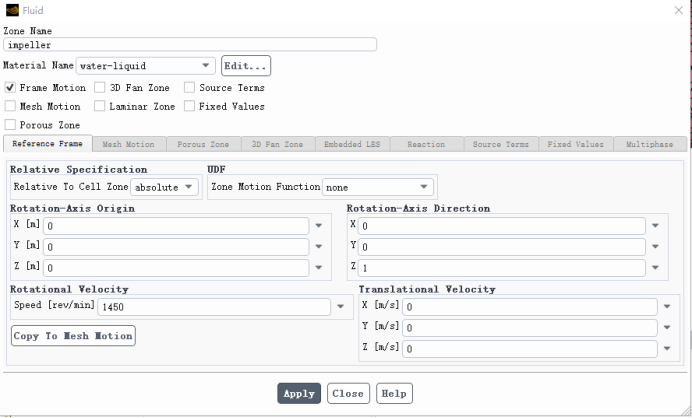
选择“impeller”右击选择“edit”,打开“fluid”对话框,勾选“frame motion”设置参考坐标系方法的运动特征。该方法是一种“虚假”的运动,部件网格并不会真的运动起来计算,所以计算速度会快很多。
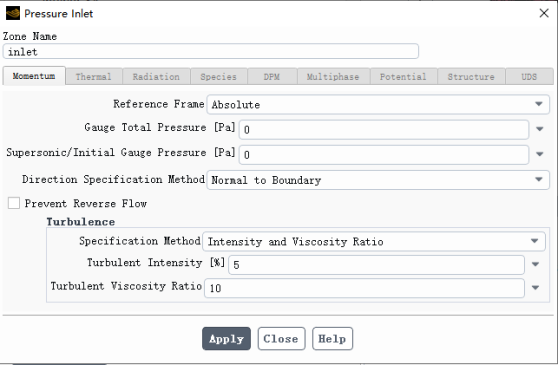
双击“boundary conditions”,把task page切换为边界条件任务窗口,选择“inlet”设置压力入口
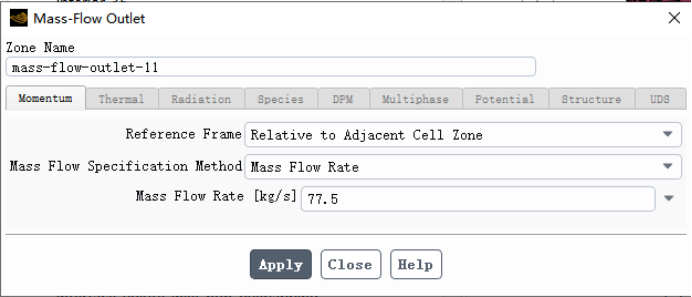
设置“mass flow outlet”为质量出口,速率为77.5千克/秒。
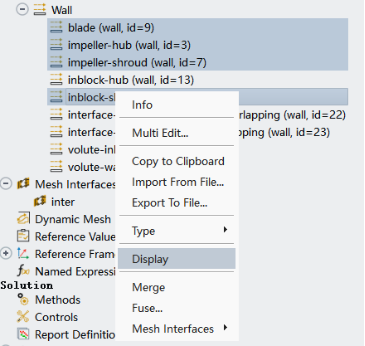
选择图示几何面后右击选择“display”
在图形显示界面,观察显示的几个面是否为需要设置为运动跟随的几何面。旋转运动流体域的所有几何面都应设置为运动跟随,上图中空缺的几何面为:接触交界面、进出口边界条件面,都属于边界条件设置平面,无需设置运动跟随。
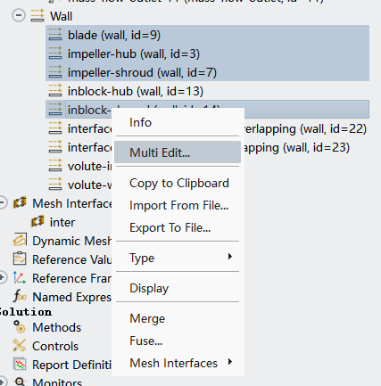
再次选择以上观察平面,右击选择“multi edit”,可以多个平面一起进行相关设置,提高工作效率。
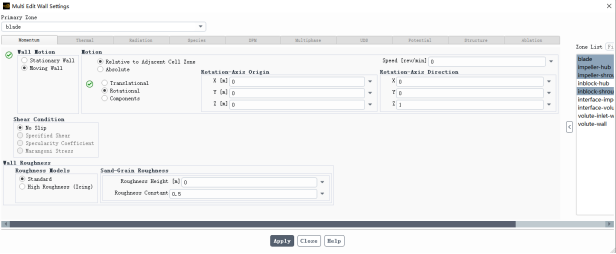
打开“multi edit wall settings”对话框,选择“moving wall”及“rotational”,因为这些平面是跟随相邻区域一起运动的,所以无需再次设置运动方向和速度。
具体“moving wall”设置需根据工程实际问题情况,很多模型这一步不做,也能计算出结果,但是还是要细心体会两者的区别。
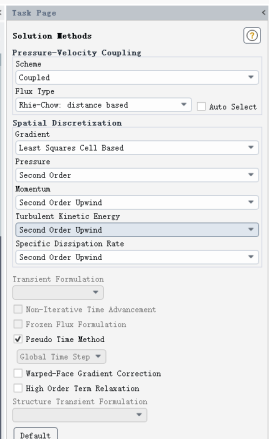
双击模型树“solution”“methods”选择计算方法。

右击“solution”“report definitions”,如图选择“mass weighted average”选择质量平均方法。设置输出监测。图上显示的面积质量平均。
双击“solution”“convergence conditions”选择刚刚新建的差值监测,设置监测条件,既差值达到多少时结束收敛计算。
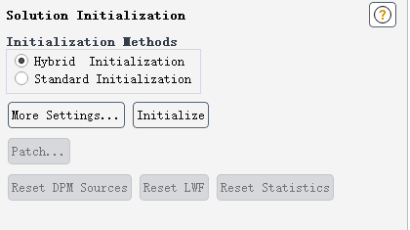
击模型树节点Initialization,右侧面板中选择选项hybrid Initialization
击按钮Initialize按钮进行初始化。
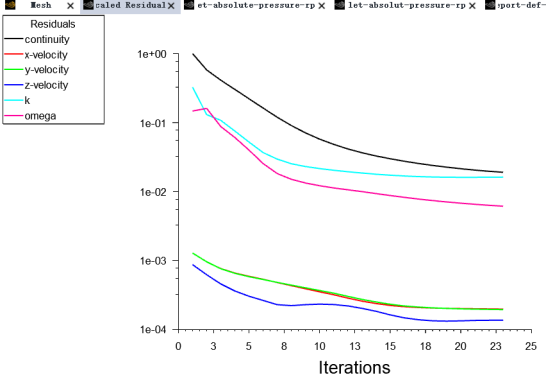
残差并未收敛
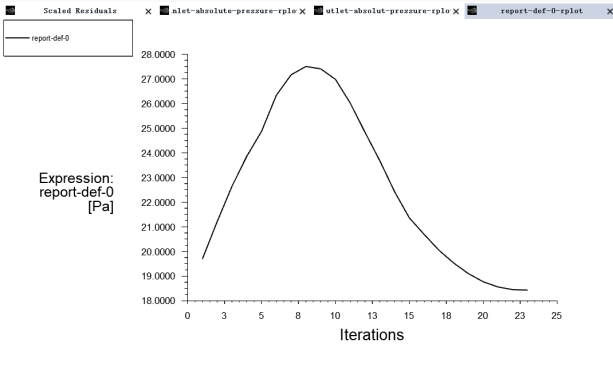
表达式收敛了
关于收敛性问题,课程中有一个小节专门做了介绍,这还是一个经验问题,很多时候没有固定要求。
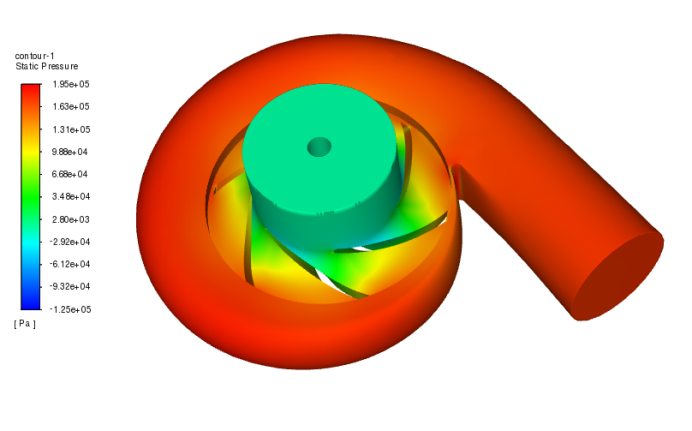
压力云图
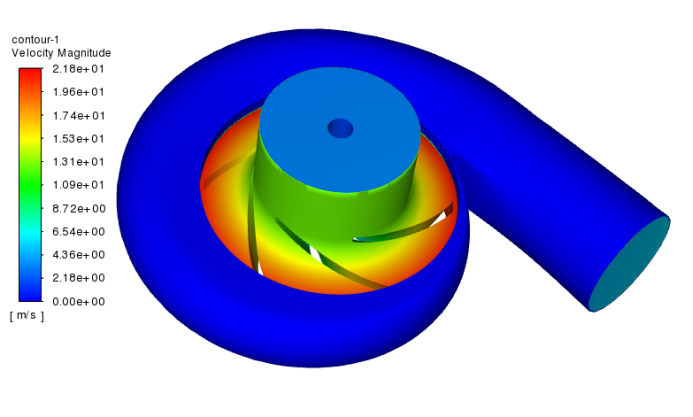
速度云图
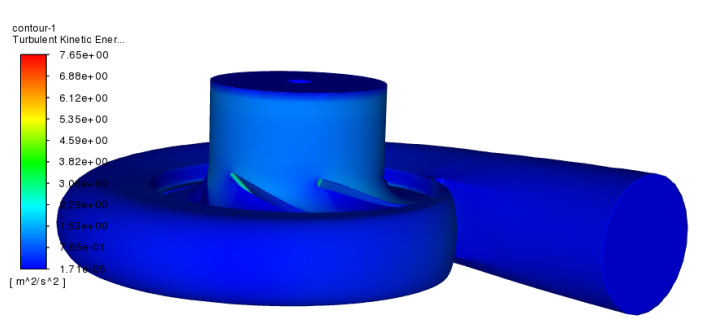
湍流云图
结果查看也是一样的,需要根据自己的需求去设置,毕竟不是毕业论文,彩图放上描述一下就行了,一般来说,工程仿真模拟最好有点问题,不然怎么改进呢?有困难要上,没有困难制造困难也要上,就是这个道理。新学期开始,估计又有不少学生要薅头发熬夜了,不如来咱仿真秀看看,薅课程的羊毛保头发吧。
审核编辑:汤梓红
-
仿真
+关注
关注
55文章
4560浏览量
138793 -
坐标系
+关注
关注
0文章
29浏览量
7631 -
模型
+关注
关注
1文章
3861浏览量
52322 -
离心泵
+关注
关注
0文章
34浏览量
3782
原文标题:薅头发or薅羊毛?以离心泵多参考坐标系运动仿真讲解为例
文章出处:【微信号:sim_ol,微信公众号:模拟在线】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
离心泵的四种主流节能技术分析
离心泵特性曲线测定ppt
离心泵特性曲线的测定

离心泵的工作原理
离心泵结构组成图解
离心泵的密封方式_离心泵的主要参数
世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系




评论