 电机运动控制算法之S速度曲线规划算法
电机运动控制算法之S速度曲线规划算法

转自| 小麦大叔
搞过电机或运动控制的小伙伴应该知道,S曲线很重要,下面一张动图对比一下,你就知道S曲线的好处。
今天就给大家描述一下S速度曲线规划算法。
1 前言
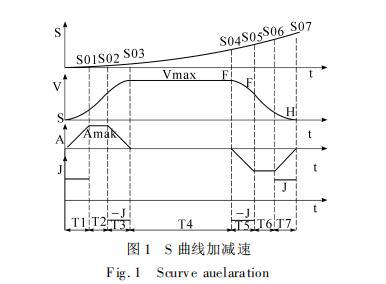
S形加减速的最重要特征是该算法的加速度/减速度曲线的形状如字母 S。S形加减速的速度曲线平滑 ,从而能够减少对控制过程中的冲击,并使插补过程具有柔性 [^1]。由于T形曲线在加速到匀速的切换过程中,实际中存在较大过冲,因此这里对比一下T曲线和7段S曲线的实际过程;
T形:加速 -> 匀速 -> 减速
S形:加加速(T1) -> 匀加速(T2) -> 减加速(T3)-> 匀速(T4)-> 加减速(T5)-> 匀减速(T6)-> 减减速(T7)
上文在加速这块的文字描述可能读起来起来有点绕,下面看图: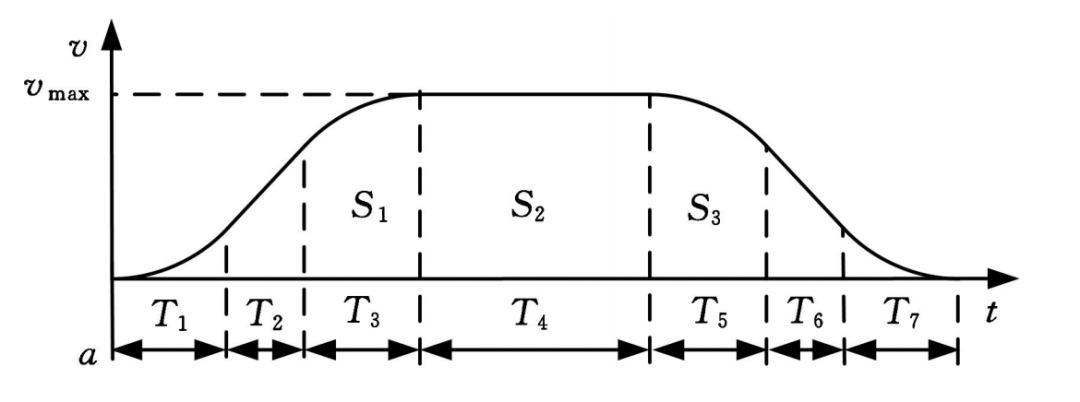
2 理论分析
由于S曲线在加减速的过程中,其加速度是变化的,因此这里引入了新的一个变量 J,即加加速度。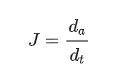
因此对应上图的7段S速度曲线中,规定最大加速为amax,最小加速度为-amax,则加速度的关系;
所以通常需要确定三个最基本的系统参数 :系统最大速度umax ,最大加速度a_{max} ,加加速度,就可以可确定整个运行过程[^2] ;
最大速度:反映了系统的最大运行能力 ;
最大加速度:反映了系统的最大加减速能力 ;
加加速度:反映了系统的柔性;
柔性越大,过冲越大,运行时间越短;
柔性越小,过冲越小,运行时间越长;
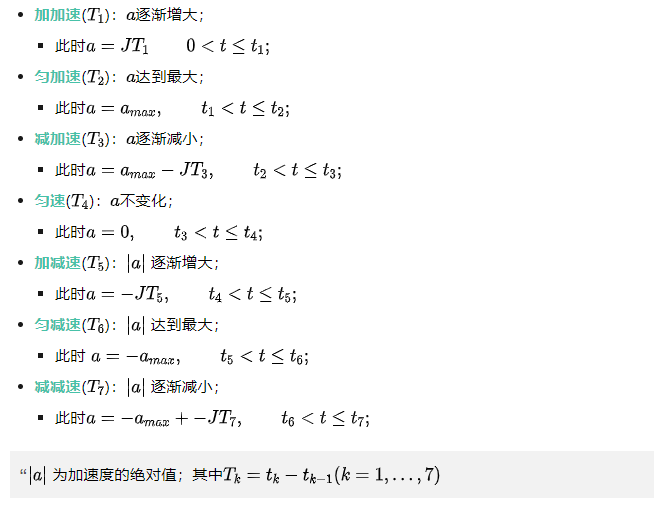
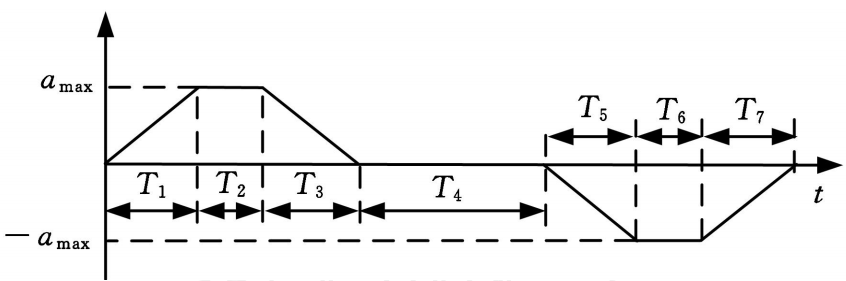
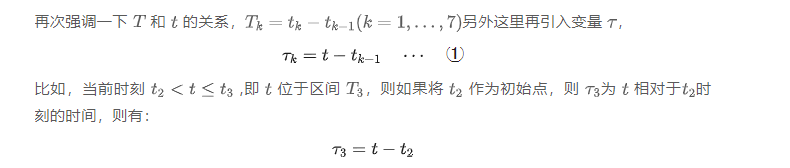
2.1 加速度时间关系方程
整个加速度变化的过程具体如下图所示;
2.2 速度时间关系方程
速度和加速度满足 ;加加速度和速度的关系满足:
结合加速度时间关系并结合② 式可以得到速度曲线关系,具体关系如下图所示;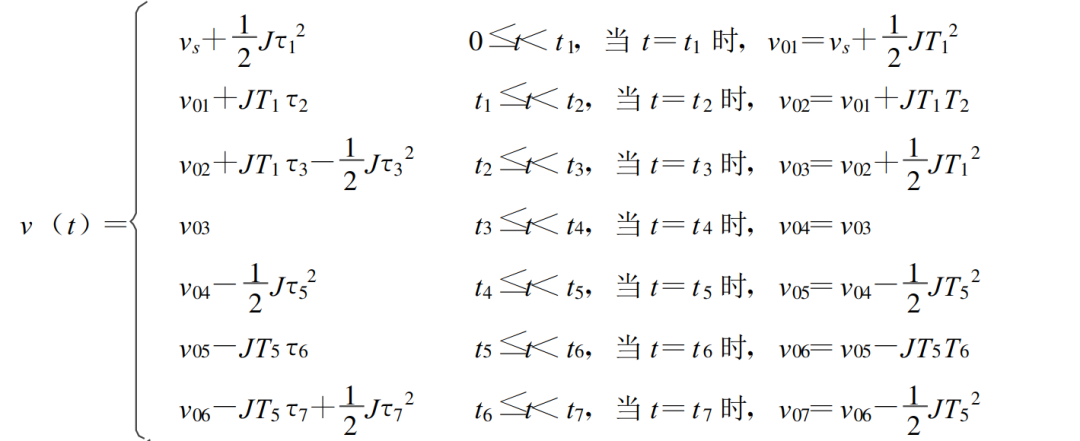
进一步简化可以得到: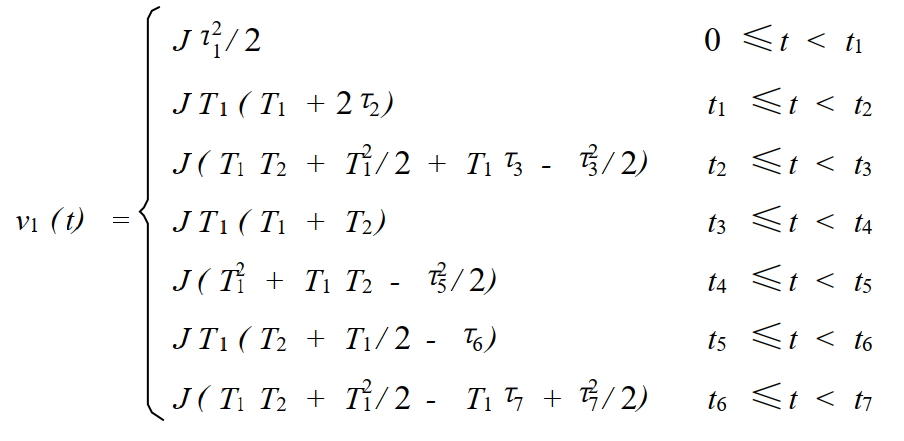
2.3 位移时间关系方程
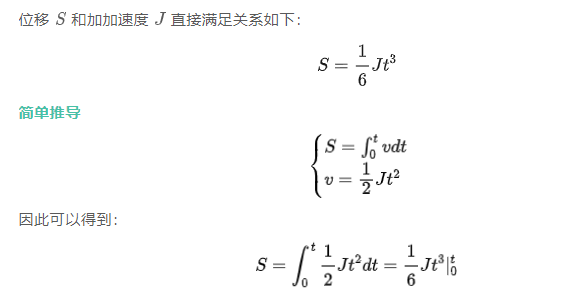
积分忘的差不多了,回去再复习一下;
最终位移的方程如下所示;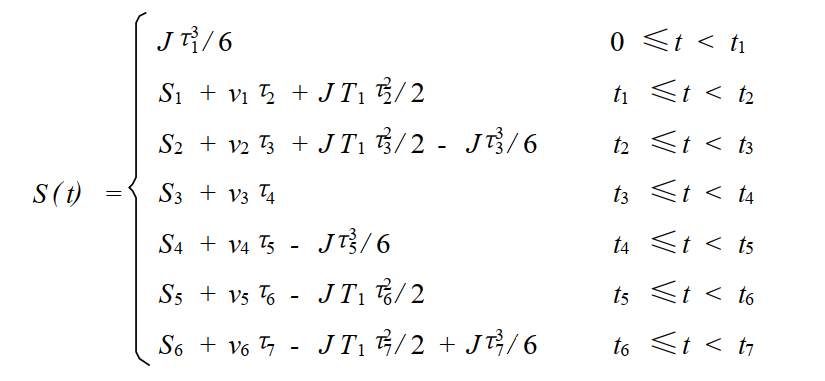
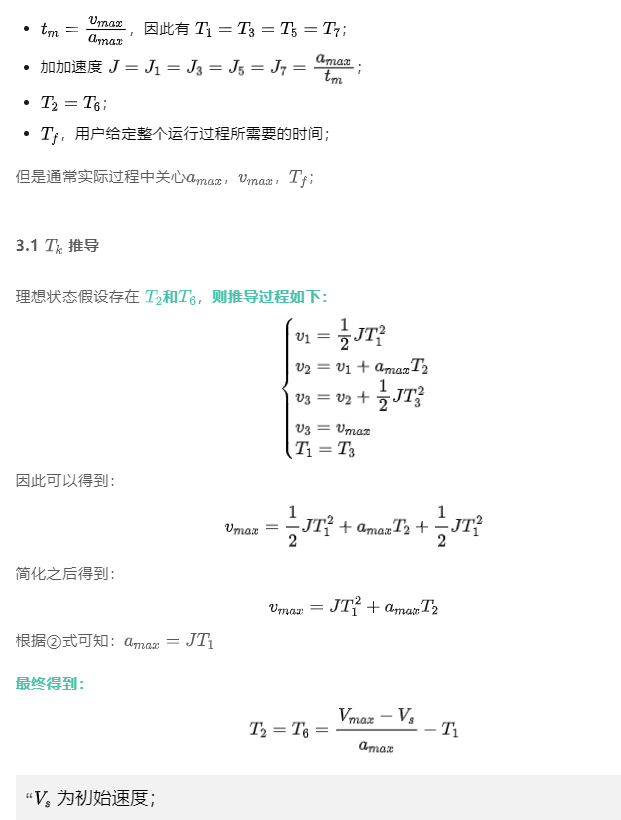
3 程序实现的思路
正如前面所提到的,S曲线规划需要确定三个最基本的系统参数 :系统最大速度 ,最大加速度a_{max} ,加加速度,这样就可以确定这个运行过程。这里有一个隐性的条件,就是在运行的过程中可以达到最大速度,这样才是完整的7段S曲线,另外这里还有一些中间参数:

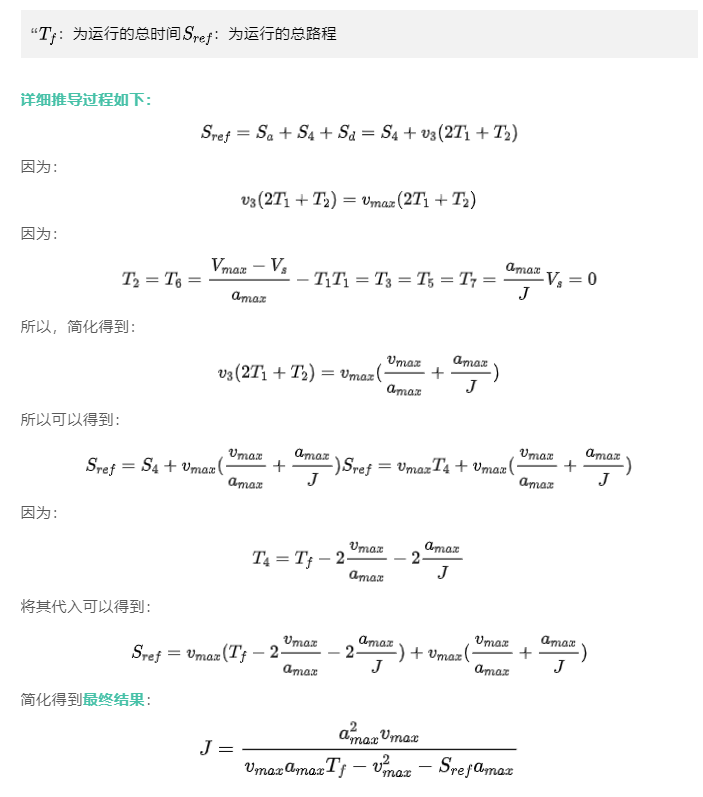
4 matlab 程序
matlab程序亲测可以运行,做了简单的修改,因为这里直接给定了整个运行过程的时间,所以需要在SCurvePara函数中求出加加速度 的值,路程为 1:
SCurvePara
function[Tf1,V,A,J,T]=SCurvePara(Tf,v,a) T=zeros(1,7); fori=1:1000 %加加速度J J=(a^2*v)/(Tf*v*a-v^2-a); %Tk T(1)=a/J; T(2)=v/a-a/J;%t2=v/a-t1; T(3)=T(1); T(4)=Tf-2*a/J-2*v/a;%t4=Tf-4*t1-2*t2; T(5)=T(3); T(6)=T(2); T(7)=T(1); %根据T2和T4判断S曲线的类型 ifT(2)< -1e-6 a = sqrt(v*J); display('t2<0'); elseif T(4) < -1e-6 v = Tf*a/2 - a*a/J; display('t4<0'); elseif J < -1e-6 Tf = (v^2 + a) / (v*a) + 1e-1; display('J<0'); else break; end end A = a; V = v; Tf1 = Tf; end
SCurveScaling
functions=SCurveScaling(t,V,A,J,T,Tf) %J=(A^2*V)/(Tf*V*A-V^2-A); %T(1)=A/J; %T(2)=V/A-A/J;%T(2)=V/A-T(1); %T(3)=T(1); %T(4)=Tf-2*A/J-2*V/A;%T(4)=Tf-4*T(1)-2*T(2); %T(5)=T(3); %T(6)=T(2); %T(7)=T(1); %% if(t>=0&&t<= T(1)) s = 1/6 * J * t^3; elseif ( t >T(1)&&t<= T(1)+T(2) ) dt = t - T(1); s = 1/2 * A * dt^2 + A^2/(2*J) * dt... + A^3/(6*J^2); elseif ( t >T(1)+T(2)&&t<= T(1)+T(2)+T(3) ) dt = t - T(1) - T(2); s = -1/6*J*dt^3 + 1/2*A*dt^2 + (A*T(2) + A^2/(2*J))*dt ... + 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2); elseif ( t >T(1)+T(2)+T(3)&&t<= T(1)+T(2)+T(3)+T(4) ) dt = t - T(1) - T(2) - T(3); s = V*dt ... + (-1/6*J*T(3)^3) + 1/2*A*T(3)^2 + (A*T(2) + A^2/(2*J))*T(3) + 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2); elseif ( t >T(1)+T(2)+T(3)+T(4)&&t<= T(1)+T(2)+T(3)+T(4)+T(5) ) t_temp = Tf - t; dt = t_temp - T(1) - T(2); s = -1/6*J*dt^3 + 1/2*A*dt^2 + (A*T(2) + A^2/(2*J))*dt ... + 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2); s = 1 - s; elseif ( t >T(1)+T(2)+T(3)+T(4)+T(5)&&t<= T(1)+T(2)+T(3)+T(4)+T(5)+T(6) ) t_temp = Tf - t; dt = t_temp - T(1); s = 1/2 * A * dt^2 + A^2/(2*J) * dt + A^3/(6*J^2); s = 1 - s; elseif ( t >T(1)+T(2)+T(3)+T(4)+T(5)+T(6)&&t<= T(1)+T(2)+T(3)+T(4)+T(5)+T(6)+T(7) + 1e5 ) t_temp = Tf - t; s = 1/6 * J * t_temp^3; s = 1 - s; end end
测试的代码如下:TEST
%% N=500; ThetaStart=0;%起始位置 ThetaEnd=90;%最终位置 VTheta=90;%1速度 ATheta=135;%1.5加速度 Tf=1.8;%总行程时间 v=VTheta/(ThetaEnd-ThetaStart); a=ATheta/(ThetaEnd-ThetaStart); v=abs(v); a=abs(a); Theta=zeros(1,N); s=zeros(1,N); sd=zeros(1,N); sdd=zeros(1,N); [TF,V,A,J,T]=SCurvePara(Tf,v,a); display(J,'J:'); display(TF,'Tf:'); display(V,'v:'); display(A,'da:'); display(TF-Tf,'dTf:'); display(V-v,'dv:'); display(A-a,'da:'); t=linspace(0,TF,N); dt=t(2)-t(1); fori=1:N ifi==N a=a; end s(i)=SCurveScaling(t(i),V,A,J,T,TF); Theta(i)=ThetaStart+s(i)*(ThetaEnd-ThetaStart); ifi>1 sd(i-1)=(s(i)-s(i-1))/dt; end ifi>2 sdd(i-2)=(sd(i-1)-sd(i-2))/dt; end end subplot(3,1,1); legend('Theta'); xlabel('t'); subplot(3,1,1); plot(t,s) legend('位移'); xlabel('t'); title('位置曲线'); subplot(3,1,2); plot(t,sd); legend('速度'); xlabel('t'); title('速度曲线'); subplot(3,1,3); plot(t,sdd); legend('加速度'); xlabel('t'); title('加速度曲线');
看到最终仿真结果和预期相同;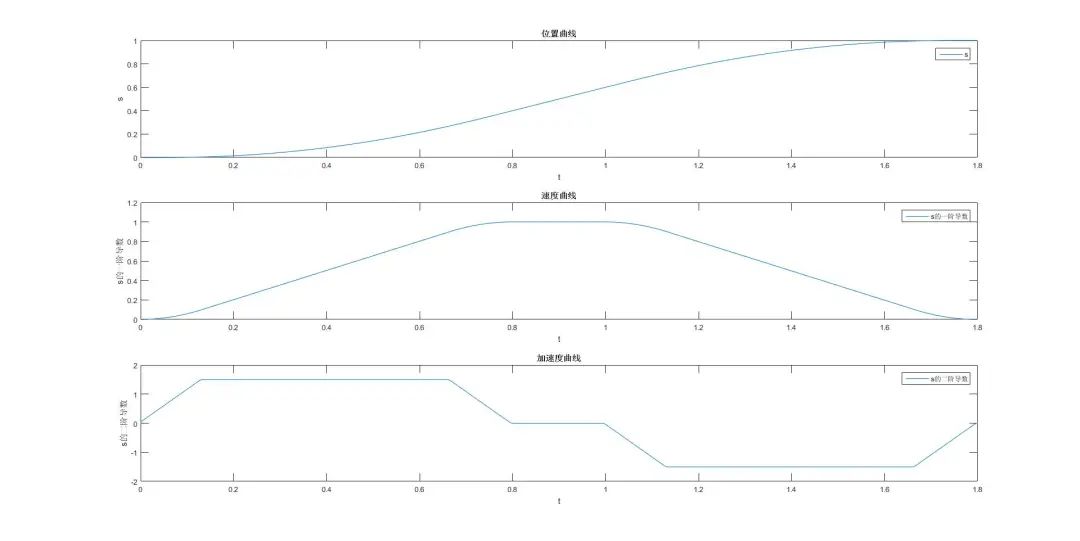
最后再看一下T形和S形速度曲线规划的效果对比:
5 总结
本文只对7段的S曲线规划做了详细的推导和介绍,matlab中的程序对于4段和5段都有做实现,很多是在理想情况下进行推导的,初始速度默认为0,终止速度也为0,并且假设加减速区域相互对称。最终运行结果符合预期效果。
审核编辑:汤梓红
-
电机
+关注
关注
145文章
9760浏览量
155063 -
运动控制
+关注
关注
5文章
843浏览量
34735 -
控制算法
+关注
关注
4文章
177浏览量
22883
原文标题:电机运动控制算法总结
文章出处:【微信号:strongerHuang,微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
DSP 速度曲线规划 电机
实时生成步进电机速度曲线
基于路径跟踪方法的路径规划算法
CNC系统中S曲线加减速规划算法的研究实现



评论