 十分钟读懂旋转编码(RoPE)
十分钟读懂旋转编码(RoPE)

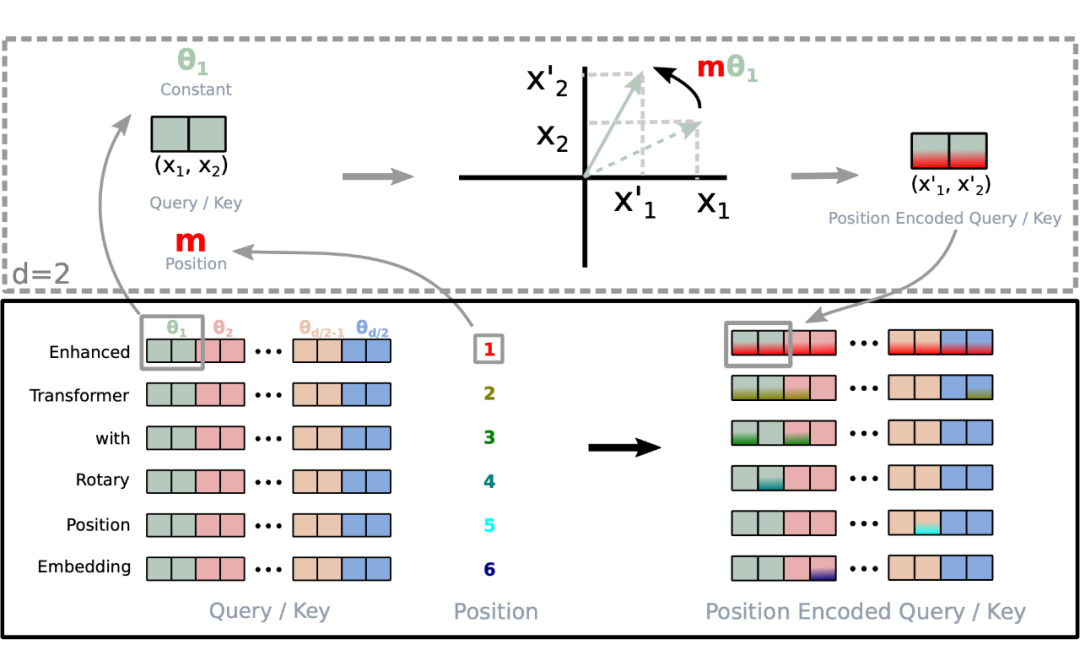
旋转位置编码(Rotary Position Embedding,RoPE)是论文 Roformer: Enhanced Transformer With Rotray Position Embedding 提出的一种能够将相对位置信息依赖集成到 self-attention 中并提升 transformer 架构性能的位置编码方式。而目前很火的 LLaMA、GLM 模型也是采用该位置编码方式。
和相对位置编码相比,RoPE 具有更好的外推性,目前是大模型相对位置编码中应用最广的方式之一。
备注:什么是大模型外推性?
外推性是指大模型在训练时和预测时的输入长度不一致,导致模型的泛化能力下降的问题。例如,如果一个模型在训练时只使用了 512 个 token 的文本,那么在预测时如果输入超过 512 个 token,模型可能无法正确处理。这就限制了大模型在处理长文本或多轮对话等任务时的效果。
旋转编码RoPE
1.1 基本概念
在介绍 RoPE 之前,先给出一些符号定义,以及基本背景。
首先定义一个长度为 的输入序列为:


1.2 绝对位置编码
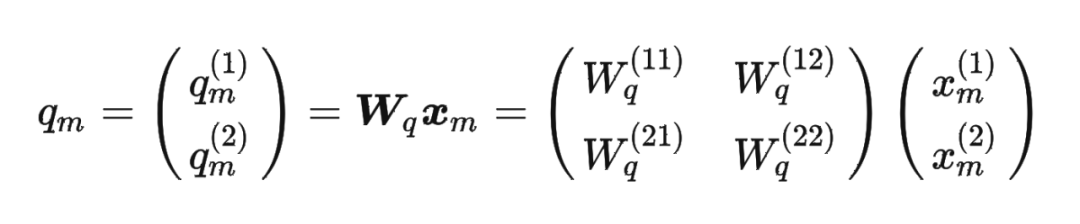
对于位置编码,常规的做法是在计算 query,key 和 value 向量之前,会计算一个位置编码向量 加到词嵌入 上,位置编码向量 同样也是 维向量,然后再乘以对应的变换矩阵 :

而经典的位置编码向量 的计算方式是使用 Sinusoidal 函数:
其中 表示位置 维度向量 中的第 位置分量也就是偶数索引位置的计算公式,而 就对应第 位置分量也就是奇数索引位置的计算公式。
1.3 2维旋转位置编码
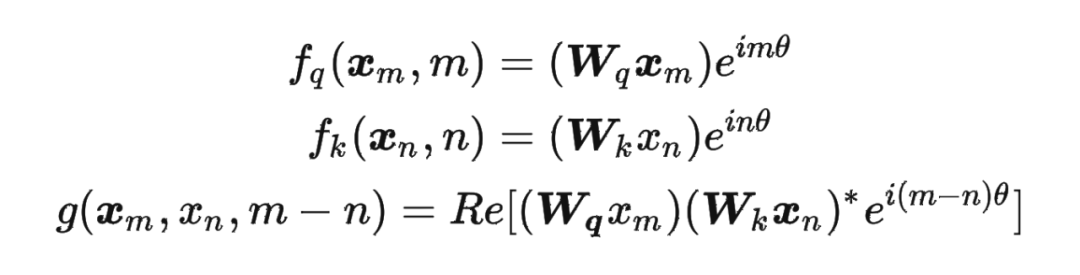
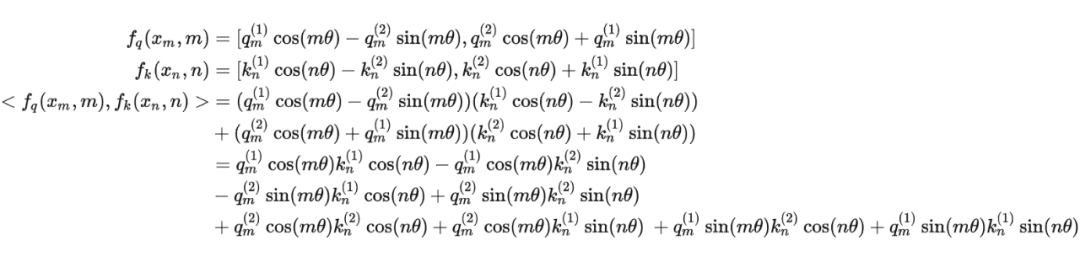
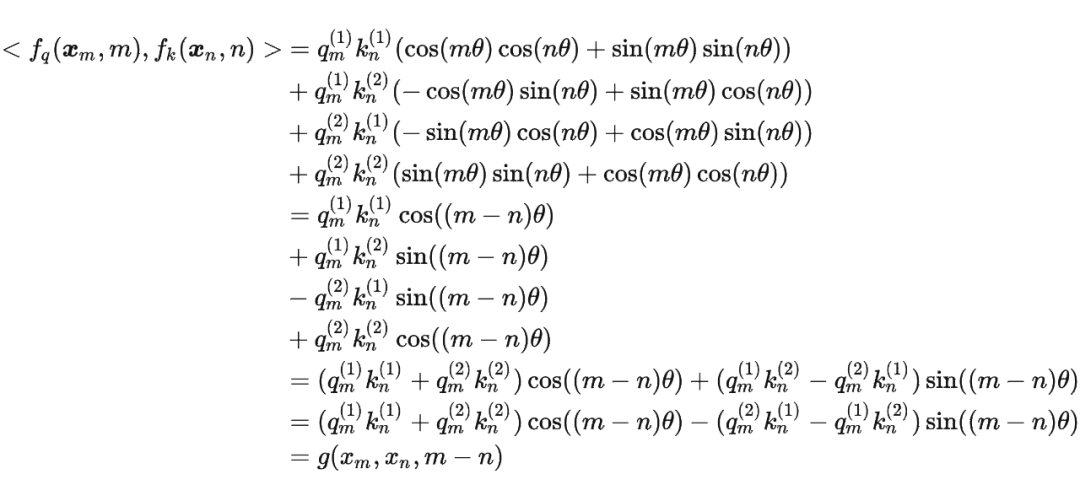
论文中提出为了能利用上 token 之间的相对位置信息,假定 query 向量 和 key 向量 之间的内积操作可以被一个函数 表示,该函数 的输入是词嵌入向量 , 和它们之间的相对位置 :
 接下来的目标就是找到一个等价的位置编码方式,从而使得上述关系成立。
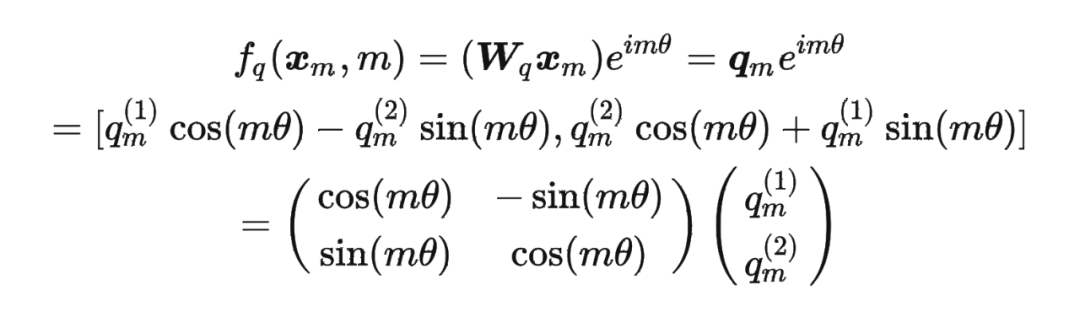
假定现在词嵌入向量的维度是两维 ,这样就可以利用上 2 维度平面上的向量的几何性质,然后论文中提出了一个满足上述关系的 和 的形式如下:
接下来的目标就是找到一个等价的位置编码方式,从而使得上述关系成立。
假定现在词嵌入向量的维度是两维 ,这样就可以利用上 2 维度平面上的向量的几何性质,然后论文中提出了一个满足上述关系的 和 的形式如下: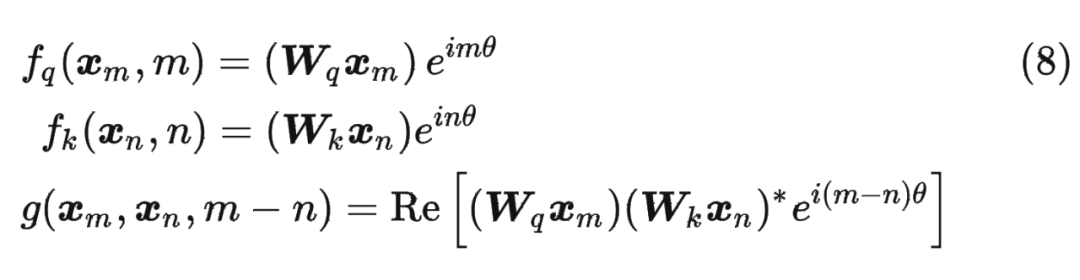 这里面 Re 表示复数的实部。
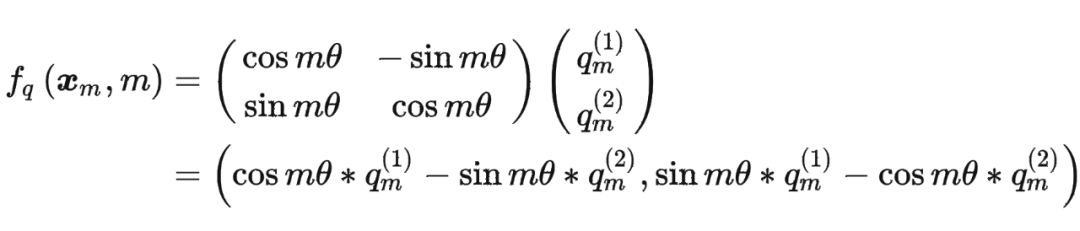
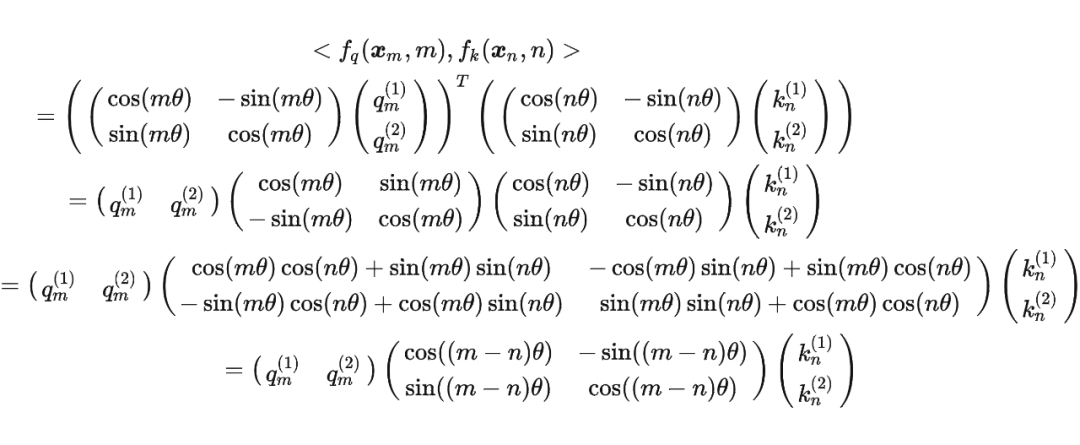
进一步地, 可以表示成下面的式子:
这里面 Re 表示复数的实部。
进一步地, 可以表示成下面的式子: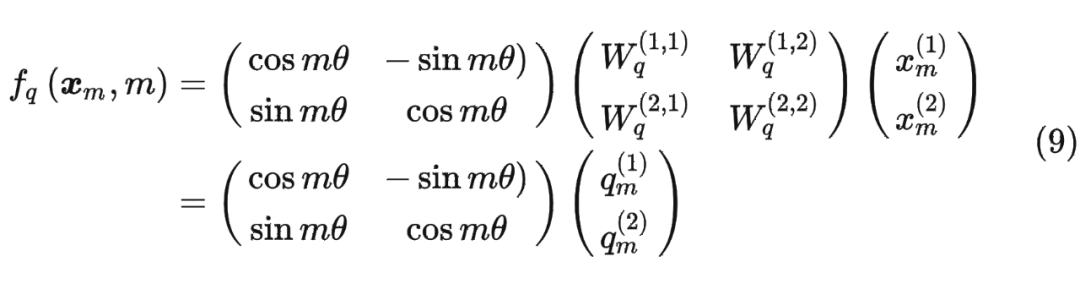 看到这里会发现,这不就是 query 向量乘以了一个旋转矩阵吗?这就是为什么叫做旋转位置编码的原因。
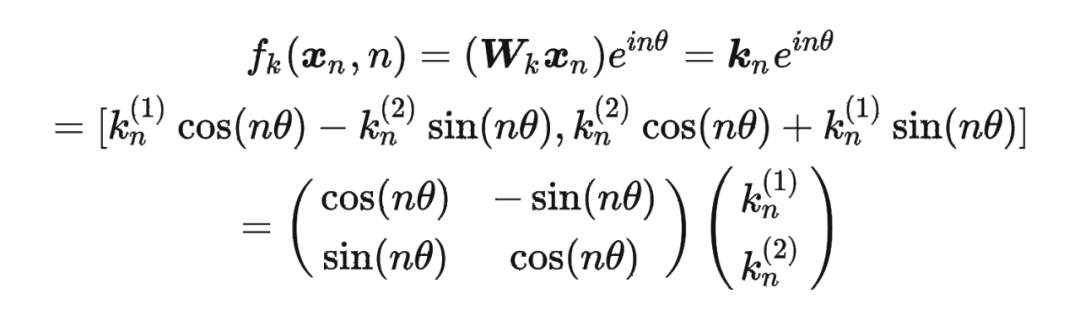
同理, 可以表示成下面的式子:
看到这里会发现,这不就是 query 向量乘以了一个旋转矩阵吗?这就是为什么叫做旋转位置编码的原因。
同理, 可以表示成下面的式子: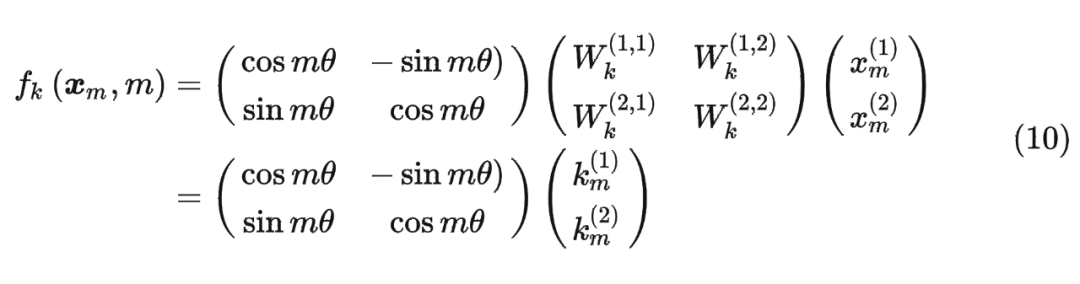 最终 可以表示如下:
最终 可以表示如下:

将2维推广到任意维度,可以表示如下:
 内积满足线性叠加性,因此任意偶数维的 RoPE,我们都可以表示为二维情形的拼接,即
内积满足线性叠加性,因此任意偶数维的 RoPE,我们都可以表示为二维情形的拼接,即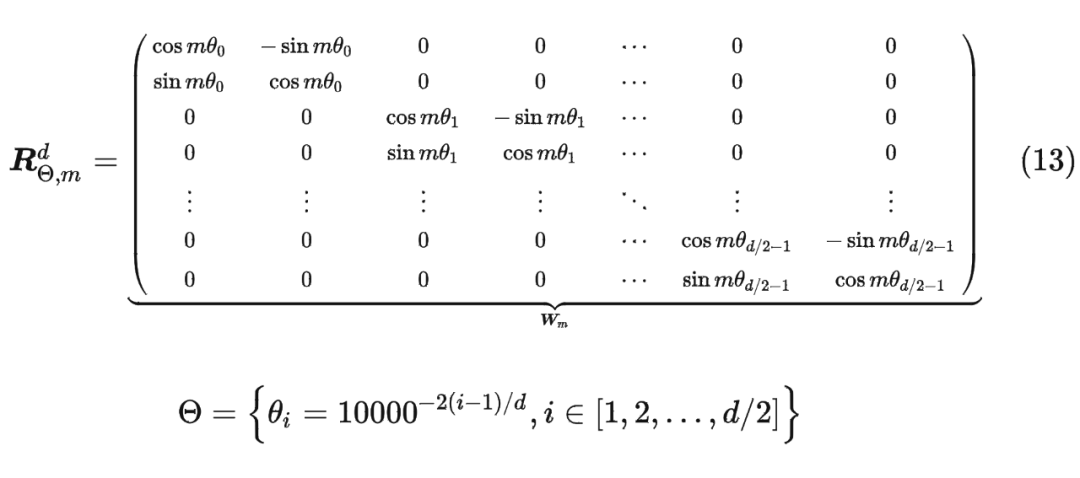 将 RoPE 应用到前面公式(4)的 Self-Attention 计算,可以得到包含相对位置信息的 Self-Attetion:
将 RoPE 应用到前面公式(4)的 Self-Attention 计算,可以得到包含相对位置信息的 Self-Attetion:
其中,。
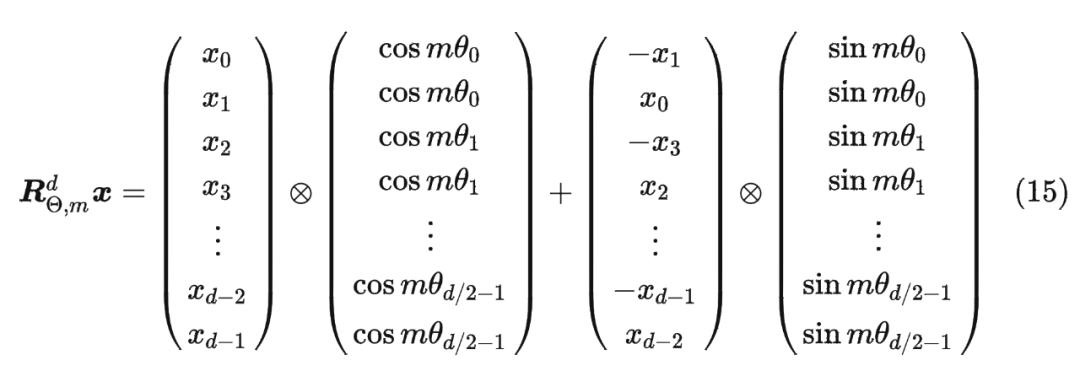
值得指出的是,由于 是一个正交矩阵,它不会改变向量的模长,因此通常来说它不会改变原模型的稳定性。 1.5 RoPE 的高效计算由于 的稀疏性,所以直接用矩阵乘法来实现会很浪费算力,推荐通过下述方式来实现 RoPE:
1.6 远程衰减
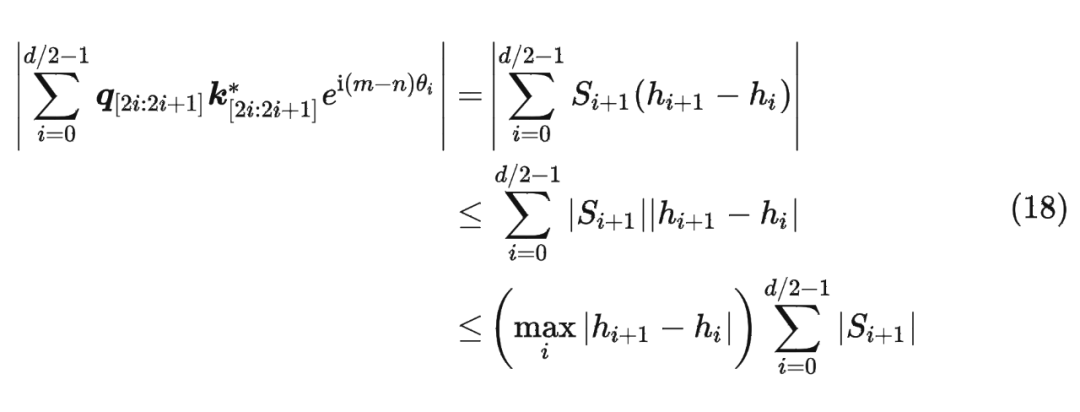
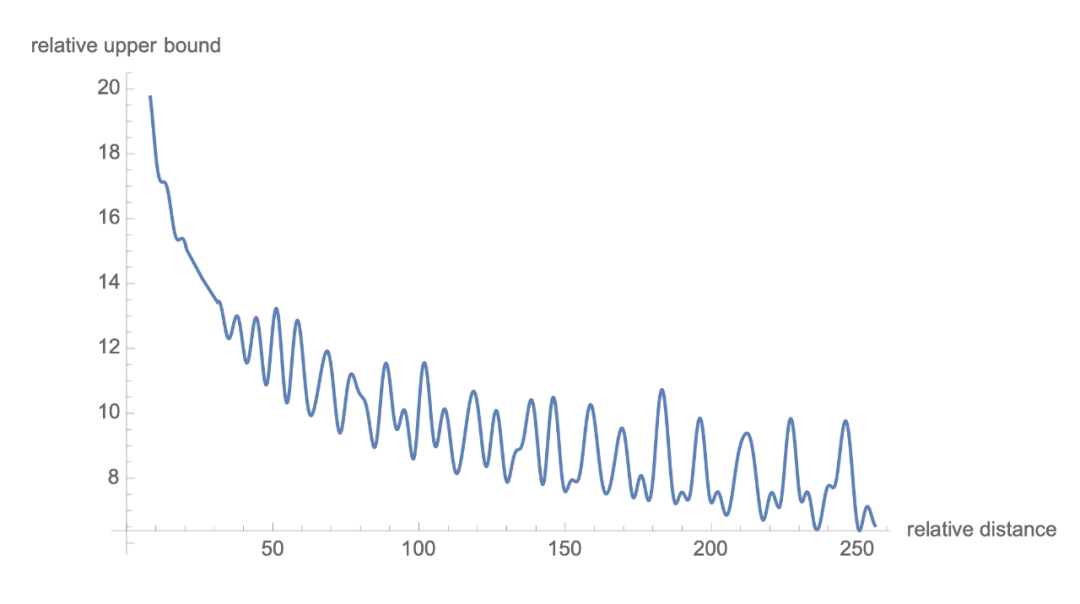
可以看到,RoPE 形式上和前面公式(6)Sinusoidal 位置编码有点相似,只不过 Sinusoidal 位置编码是加性的,而 RoPE 可以视为乘性的。在 的选择上,RoPE 同样沿用了 Sinusoidal 位置编码的方案,即 ,它可以带来一定的远程衰减性。
具体证明如下:将 两两分组后,它们加上 RoPE 后的内积可以用复数乘法表示为:


并约定 ,那么由 Abel 变换(分部求和法)可以得到:

RoPE实验
我们看一下 RoPE 在预训练阶段的实验效果:
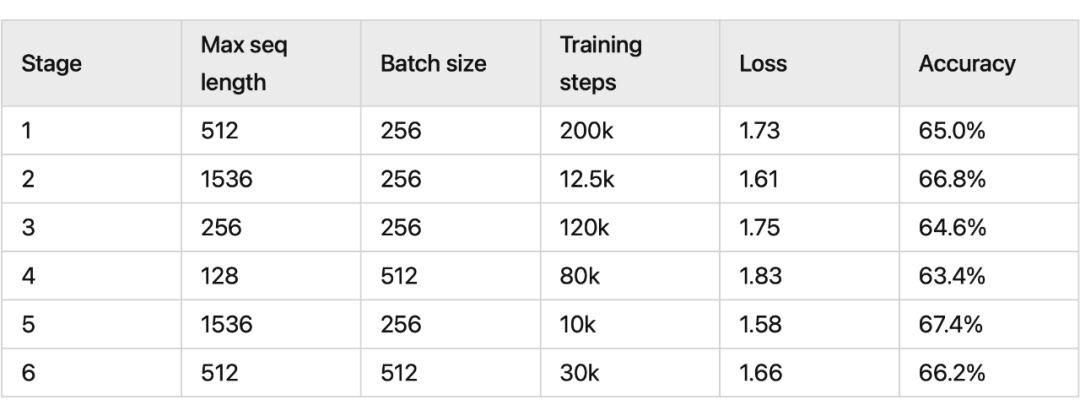
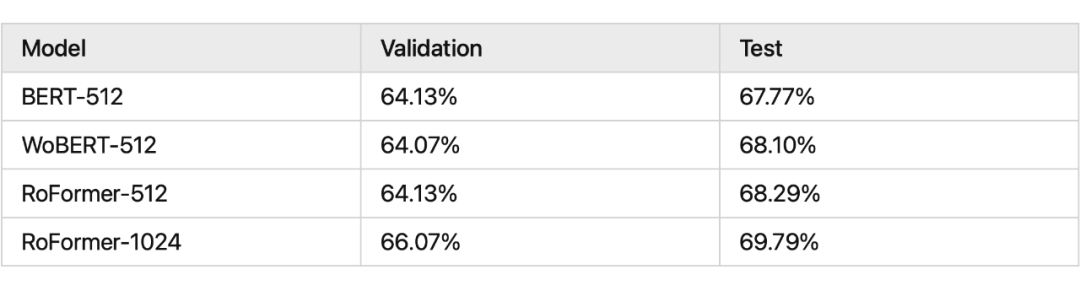 其中 RoFormer 是一个绝对位置编码替换为 RoPE 的 WoBERT 模型,后面的参数(512)是微调时截断的maxlen,可以看到 RoPE 确实能较好地处理长文本语义。
其中 RoFormer 是一个绝对位置编码替换为 RoPE 的 WoBERT 模型,后面的参数(512)是微调时截断的maxlen,可以看到 RoPE 确实能较好地处理长文本语义。
RoPE代码实现
Meta 的 LLAMA 和 清华的 ChatGLM 都使用了 RoPE 编码,下面看一下具体实现。
3.1 在LLAMA中的实现
#生成旋转矩阵
defprecompute_freqs_cis(dim:int,seq_len:int,theta:float=10000.0):
#计算词向量元素两两分组之后,每组元素对应的旋转角度 heta_i
freqs=1.0/(theta**(torch.arange(0,dim,2)[:(dim//2)].float()/dim))
#生成token序列索引t=[0,1,...,seq_len-1]
t=torch.arange(seq_len,device=freqs.device)
#freqs.shape=[seq_len,dim//2]
freqs=torch.outer(t,freqs).float()#计算m* heta
#计算结果是个复数向量
#假设freqs=[x,y]
#则freqs_cis=[cos(x)+sin(x)i,cos(y)+sin(y)i]
freqs_cis=torch.polar(torch.ones_like(freqs),freqs)
returnfreqs_cis
#旋转位置编码计算
defapply_rotary_emb(
xq:torch.Tensor,
xk:torch.Tensor,
freqs_cis:torch.Tensor,
)->Tuple[torch.Tensor,torch.Tensor]:
#xq.shape=[batch_size,seq_len,dim]
#xq_.shape=[batch_size,seq_len,dim//2,2]
xq_=xq.float().reshape(*xq.shape[:-1],-1,2)
xk_=xk.float().reshape(*xk.shape[:-1],-1,2)
#转为复数域
xq_=torch.view_as_complex(xq_)
xk_=torch.view_as_complex(xk_)
#应用旋转操作,然后将结果转回实数域
#xq_out.shape=[batch_size,seq_len,dim]
xq_out=torch.view_as_real(xq_*freqs_cis).flatten(2)
xk_out=torch.view_as_real(xk_*freqs_cis).flatten(2)
returnxq_out.type_as(xq),xk_out.type_as(xk)
classAttention(nn.Module):
def__init__(self,args:ModelArgs):
super().__init__()
self.wq=Linear(...)
self.wk=Linear(...)
self.wv=Linear(...)
self.freqs_cis=precompute_freqs_cis(dim,max_seq_len*2)
defforward(self,x:torch.Tensor):
bsz,seqlen,_=x.shape
xq,xk,xv=self.wq(x),self.wk(x),self.wv(x)
xq=xq.view(batch_size,seq_len,dim)
xk=xk.view(batch_size,seq_len,dim)
xv=xv.view(batch_size,seq_len,dim)
#attention操作之前,应用旋转位置编码
xq,xk=apply_rotary_emb(xq,xk,freqs_cis=freqs_cis)
#scores.shape=(bs,seqlen,seqlen)
scores=torch.matmul(xq,xk.transpose(1,2))/math.sqrt(dim)
scores=F.softmax(scores.float(),dim=-1)
output=torch.matmul(scores,xv)#(batch_size,seq_len,dim)
#......
这里举一个例子,假设 batch_size=10, seq_len=3, d=8,则调用函数 precompute_freqs_cis(d, seq_len) 后,生成结果为:
In[239]:freqs_cis
Out[239]:
tensor([[1.0000+0.0000j,1.0000+0.0000j,1.0000+0.0000j,1.0000+0.0000j],
[0.5403+0.8415j,0.9950+0.0998j,0.9999+0.0100j,1.0000+0.0010j],
[-0.4161+0.9093j,0.9801+0.1987j,0.9998+0.0200j,1.0000+0.0020j]])
以结果中的第二行为例(对应的 m = 1),也就是:
 最终按照公式(12)可以得到编码之后的 。
注意:在代码中是直接用 freqs_cis[0] * xq_[0] 的结果表示第一个 token 对应的旋转编码(和公式 12 计算方式有所区别)。其中将原始的 query 向量 转换为了复数形式。
最终按照公式(12)可以得到编码之后的 。
注意:在代码中是直接用 freqs_cis[0] * xq_[0] 的结果表示第一个 token 对应的旋转编码(和公式 12 计算方式有所区别)。其中将原始的 query 向量 转换为了复数形式。
In[351]:q_=q.float().reshape(*q.shape[:-1],-1,2)
In[352]:q_[0]
Out[352]:
tensor([[[1.0247,0.4782],
[1.5593,0.2119],
[0.4175,0.5309],
[0.4858,0.1850]],
[[-1.7456,0.6849],
[0.3844,1.1492],
[0.1700,0.2106],
[0.5433,0.2261]],
[[-1.1206,0.6969],
[0.8371,-0.7765],
[-0.3076,0.1704],
[-0.5999,-1.7029]]])
In[353]:xq=torch.view_as_complex(q_)
In[354]:xq[0]
Out[354]:
tensor([[1.0247+0.4782j,1.5593+0.2119j,0.4175+0.5309j,0.4858+0.1850j],
[-1.7456+0.6849j,0.3844+1.1492j,0.1700+0.2106j,0.5433+0.2261j],
[-1.1206+0.6969j,0.8371-0.7765j,-0.3076+0.1704j,-0.5999-1.7029j]])
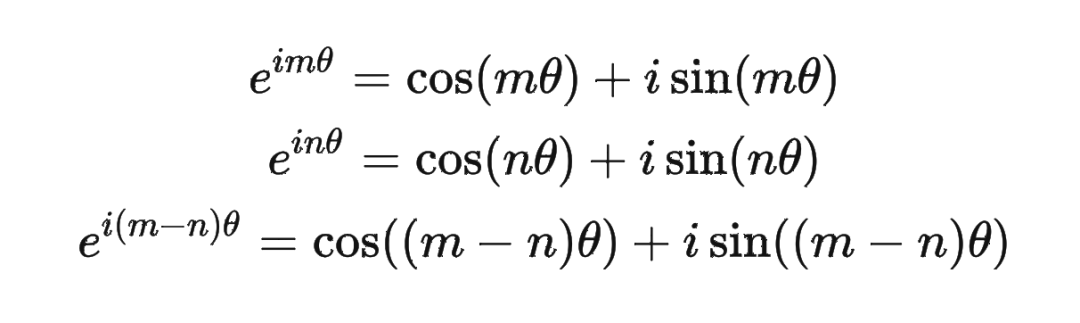
这里为什么可以这样计算?
主要是利用了复数的乘法性质。
我们首先来复习一下复数乘法的性质:


classRotaryEmbedding(torch.nn.Module):
def__init__(self,dim,base=10000,precision=torch.half,learnable=False):
super().__init__()
#计算 heta_i
inv_freq=1./(base**(torch.arange(0,dim,2).float()/dim))
inv_freq=inv_freq.half()
self.learnable=learnable
iflearnable:
self.inv_freq=torch.nn.Parameter(inv_freq)
self.max_seq_len_cached=None
else:
self.register_buffer('inv_freq',inv_freq)
self.max_seq_len_cached=None
self.cos_cached=None
self.sin_cached=None
self.precision=precision
defforward(self,x,seq_dim=1,seq_len=None):
ifseq_lenisNone:
seq_len=x.shape[seq_dim]
ifself.max_seq_len_cachedisNoneor(seq_len>self.max_seq_len_cached):
self.max_seq_len_cached=Noneifself.learnableelseseq_len
#生成token序列索引t=[0,1,...,seq_len-1]
t=torch.arange(seq_len,device=x.device,dtype=self.inv_freq.dtype)
#对应m* heta
freqs=torch.einsum('i,j->ij',t,self.inv_freq)
#将m* heta拼接两次,对应复数的实部和虚部
emb=torch.cat((freqs,freqs),dim=-1).to(x.device)
ifself.precision==torch.bfloat16:
emb=emb.float()
#[sx,1(b*np),hn]
cos_cached=emb.cos()[:,None,:]#计算得到cos(m* heta)
sin_cached=emb.sin()[:,None,:]#计算得到cos(m* heta)
ifself.precision==torch.bfloat16:
cos_cached=cos_cached.bfloat16()
sin_cached=sin_cached.bfloat16()
ifself.learnable:
returncos_cached,sin_cached
self.cos_cached,self.sin_cached=cos_cached,sin_cached
returnself.cos_cached[:seq_len,...],self.sin_cached[:seq_len,...]
def_apply(self,fn):
ifself.cos_cachedisnotNone:
self.cos_cached=fn(self.cos_cached)
ifself.sin_cachedisnotNone:
self.sin_cached=fn(self.sin_cached)
returnsuper()._apply(fn)
defrotate_half(x):
x1,x2=x[...,:x.shape[-1]//2],x[...,x.shape[-1]//2:]
returntorch.cat((-x2,x1),dim=x1.ndim-1)
RoPE的外推性
我们都知道 RoPE 具有很好的外推性,前面的实验结果也证明了这一点。这里解释下具体原因。 RoPE 可以通过旋转矩阵来实现位置编码的外推,即可以通过旋转矩阵来生成超过预期训练长度的位置编码。这样可以提高模型的泛化能力和鲁棒性。 我们回顾一下 RoPE 的工作原理:假设我们有一个 维的绝对位置编码 ,其中 是位置索引。我们可以将 看成一个 维空间中的一个点。我们可以定义一个 维空间中的一个旋转矩阵 ,它可以将任意一个点沿着某个轴旋转一定的角度。我们可以用 来变换 ,得到一个新的点 。我们可以发现, 和 的距离是相等的,即 。这意味着 和 的相对关系没有改变。但是, 和 的距离可能发生改变,即 。这意味着 和 的相对关系有所改变。因此,我们可以用 来调整不同位置之间的相对关系。 如果我们想要生成超过预训练长度的位置编码,我们只需要用 来重复变换最后一个预训练位置编码 ,得到新的位置编码
 依此类推。这样就可以得到任意长度的位置编码序列 ,其中 可以大于 。由于 是一个正交矩阵,它保证了 和 的距离不会无限增大或缩小,而是在一个有限范围内波动。这样就可以避免数值溢出或下溢的问题。同时,由于 是一个可逆矩阵,它保证了 和 的距离可以通过 的逆矩阵 还原到 和 的距离,即
依此类推。这样就可以得到任意长度的位置编码序列 ,其中 可以大于 。由于 是一个正交矩阵,它保证了 和 的距离不会无限增大或缩小,而是在一个有限范围内波动。这样就可以避免数值溢出或下溢的问题。同时,由于 是一个可逆矩阵,它保证了 和 的距离可以通过 的逆矩阵 还原到 和 的距离,即

总结
最近一直听到旋转编码这个词,但是一直没有仔细看具体原理。今天花时间仔细看了一遍,确实理论写的比较完备,而且实验效果也不错。目前很多的大模型,都选择了使用了这种编码方式(LLAMA、GLM 等)。
附录
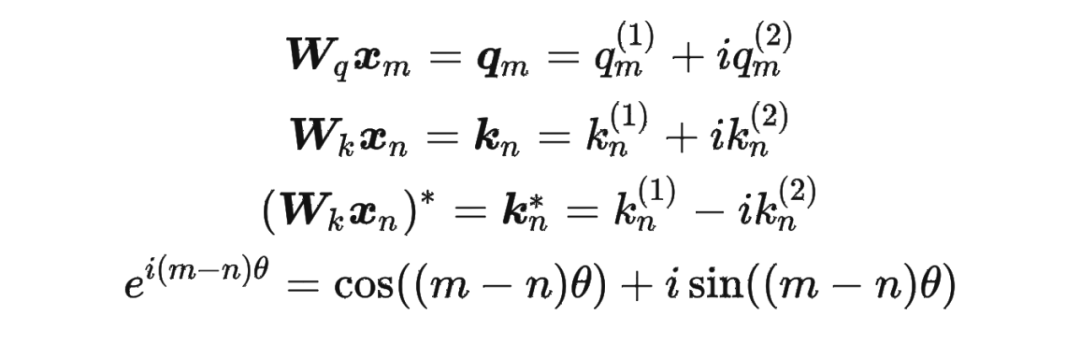
这里补充一下前面公式 1.3.2 节中,公式(8)~(11)是怎么推导出来的。 回到之前的公式(8),编码之后的 以及内积 的形式如下:


 然后我们看回公式:
然后我们看回公式: 其中 是个二维矩阵, 是个二维向量,相乘的结果也是一个二维向量,这里用 表示:
其中 是个二维矩阵, 是个二维向量,相乘的结果也是一个二维向量,这里用 表示:
 接着
接着




 其中 表示一个复数 的实部部分,而 则表示复数 的共轭。
复习一下共轭复数的定义:
其中 表示一个复数 的实部部分,而 则表示复数 的共轭。
复习一下共轭复数的定义:


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
向量
+关注
关注
0文章
55浏览量
12089 -
旋转编码
+关注
关注
0文章
6浏览量
10621 -
大模型
+关注
关注
2文章
3918浏览量
5350
原文标题:十分钟读懂旋转编码(RoPE)
文章出处:【微信号:zenRRan,微信公众号:深度学习自然语言处理】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
快充技术&芯片详解 十分钟让你的手机满血复活
快冲技术全面来袭!你了解市面上的这些手机用的快充技术原理吗?你知道有哪些电池管理芯片的使用让你的手机十分钟满血复活吗?今天跟小编一起,了解一下这些快充技术和芯片吧。
发表于 06-23 13:35
•6.8w次阅读
ModelSim SE 十分钟入门
ModelSim SE 十分钟入门[table=98%][tr][td][table=98%][tr][td]1.ModuleSim SE 快速入门本文以ModelSim SE 5.6版本为
发表于 08-12 15:07
全球首发十分钟快速充满电移动电源
`快速充电无压力:十分钟能充满的移动电源MY POWER 任性系列土豪金版深圳市麦可电源有限公司是一家专业从事高频开关电源研发、生产、销售、服务于一体的综合性企业。产品广泛应用于网络系统、安防系统
发表于 03-25 14:56
采集系统需要隔十分钟采集10S数据,怎么实现?
毕业实验需要用labview做个采集界面,但是我没有这方面基础,所以这个隔十分钟采集10S数据功能怎么也实现不了,现在我就做到下面这样,求大神指导一二~不胜感激!
发表于 01-13 12:56
十分钟学会Xilinx FPGA 设计
十分钟学会Xilinx FPGA 设计
Xilinx FPGA设计基础系统地介绍了Xilinx公司FPGA的结构特点和相关开发软件的使用方法,详细描述了VHDL语言的语法和设计方法,并深入讨
发表于 03-15 15:09
•179次下载
三星改革智能手机充电技术,充满只需十分钟
现在的手机电池续航短的问题一直手机领域研究的重点。近日,三星爆出猛料,宣布已经成功研制出石墨烯电池,以后充电只需要十分钟。
发表于 12-02 11:24
•2468次阅读
十分钟分析稳压三极管工作原理资料下载
电子发烧友网为你提供十分钟分析稳压三极管工作原理资料下载的电子资料下载,更有其他相关的电路图、源代码、课件教程、中文资料、英文资料、参考设计、用户指南、解决方案等资料,希望可以帮助到广大的电子工程师们。
发表于 04-11 08:54
•3次下载

即时零售 “十分钟送达” 不翻车?RFID 才是幕后稳控手
一、当 “十分钟送达” 成为标配,履约战场藏着怎样的暗战? 打开外卖 APP,线上下单、楼下取货的 “十分钟送达” 早已不是新鲜事。从生鲜果蔬到服鞋美妆,即时零售正在重构 3-5 公里内的消费生态



评论