 深入浅出扩散模型(Diffusion Model)系列:基石DDPM
深入浅出扩散模型(Diffusion Model)系列:基石DDPM

大家好,在【深入浅出扩散模型系列】中,我们将从原理到源码,从基石DDPM到DALLE2,Imagen与Stable Diffusion,通过详细的图例和解说,和大家一起来了解扩散模型的奥秘。同时,也会穿插对经典的GAN,VAE等模型的解读,敬请期待~
本篇将和大家一起解读扩散模型的基石:DDPM(Denoising Diffusion Probalistic Models)。扩散模型的研究并不始于DDPM,但DDPM的成功对扩散模型的发展起到至关重要的作用。在这个系列里我们也会看到,后续一连串效果惊艳的模型,都是在DDPM的框架上迭代改进而来。所以,我把DDPM放在这个系列的第一篇进行讲解。
初读DDPM论文的朋友,可能有以下两个痛点:
论文花极大篇幅讲数学推导,可是我看不懂。
论文没有给出模型架构图和详细的训练解说,而这是我最关心的部分。
针对这些痛点,DDPM系列将会出如下三篇文章:
DDPM(模型架构篇):在阅读源码的基础上,本篇绘制了详细的DDPM模型架构图(DDPM UNet),同时附上关于模型运作流程的详细解说。本篇不涉及数学知识,直观帮助大家了解DDPM怎么用,为什么好用。
DDPM(人人都能看懂的数学推理篇):也就是本篇文章,DDPM的数学推理可能是很多读者头疼的部分。我尝试跳出原始论文的推导顺序和思路,从更符合大家思维模式的角度入手,把整个推理流程串成一条完整的逻辑线。同样,我也会配上大量的图例,方便大家理解数学公式。如果你不擅长数学推导,这篇文章可以帮助你从直觉上了解DDPM的数学有效性;如果你更关注推导细节,这篇文章中也有详细的推导中间步骤。
DDPM(源码解读篇):在前两篇的基础上,我们将配合模型架构图,一起阅读DDPM源码,并实操跑一次,观测训练过程里的中间结果。
【如果你粗扫一眼本文,看见大段的公式推导,请不要放弃。出于严谨的目的,本文必须列出公式推导的细节;但是,如果你只想把握整体逻辑,完全可以跳过推导,只看结论和图解,这并不会影响本文的阅读。最后,看在这满满的手打公式和图片解读上,如果大家觉得本文有帮助,请多多点赞和在看!】
全文目录如下:
一、DDPM在做一件什么事
在DDPM模型架构篇中,我们已经讨论过DDPM的作用,以及它为何能成为扩散模型/文生图模型基石的原因。这里为了方便读者更好了解上下文,我们将相关讲解再放一次。
假设你想做一个以文生图的模型,你的目的是给一段文字,再随便给一张图(比如一张噪声),这个模型能帮你产出符合文字描述的逼真图片,例如:
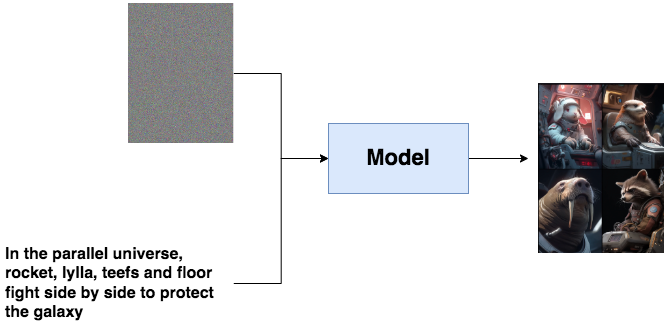
文字描述就像是一个指引(guidance),帮助模型去产生更符合语义信息的图片。但是,毕竟语义学习是复杂的。我们能不能先退一步,先让模型拥有产生逼真图片的能力?
比如说,你给模型喂一堆cyberpunk风格的图片,让模型学会cyberpunk风格的分布信息,然后喂给模型一个随机噪音,就能让模型产生一张逼真的cyberpunk照片。或者给模型喂一堆人脸图片,让模型产生一张逼真的人脸。同样,我们也能选择给训练好的模型喂带点信息的图片,比如一张夹杂噪音的人脸,让模型帮我们去噪。
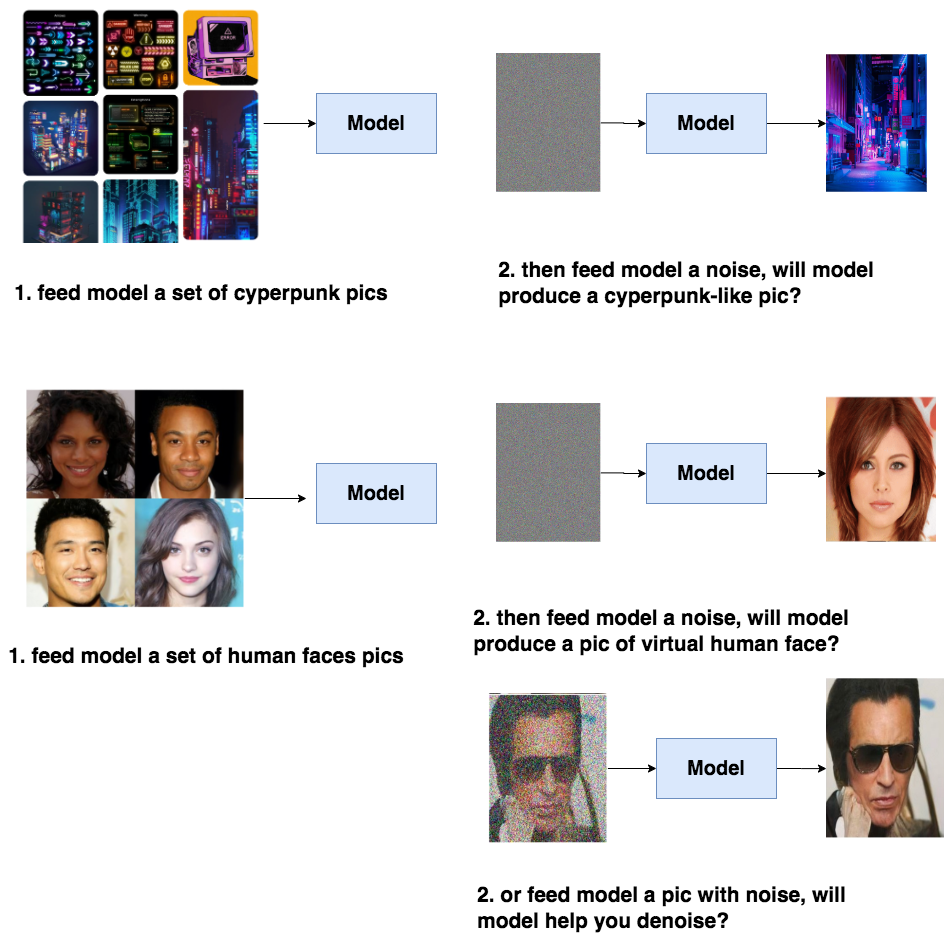
具备了产出逼真图片的能力,模型才可能在下一步中去学习语义信息(guidance),进一步产生符合人类意图的图片。而DDPM的本质作用,就是学习训练数据的分布,产出尽可能符合训练数据分布的真实图片。所以,它也成为后续文生图类扩散模型框架的基石。
二、优化目标
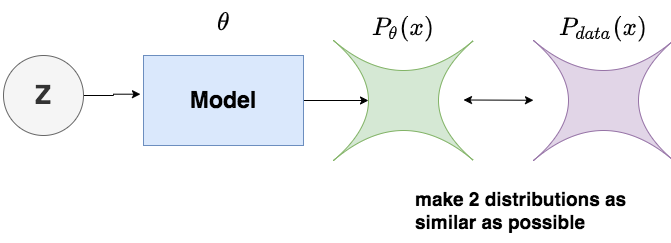
现在,我们知道DDPM的目标就是:使得生成的图片尽可能符合训练数据分布。基于这个目标,我们记:
:模型所产生的图片的(概率)分布。其中表示模型参数,以作为下标的目的是表示这个分布是由模型决定的,
:训练数据(也可理解为真实世界)图片的(概率)分布。下标data表示这是一个自然世界客观存在的分布,与模型无关。
则我们的优化目标可以用图例表示为:
而求两个分布之间的相似性,我们自然而然想到了KL散度。复习一下KL散度的定义——分布p与分布q之间的KL散度为:
则现在我们的目标函数就变为:我们利用利用式(1.1),对该目标函数做一些变换
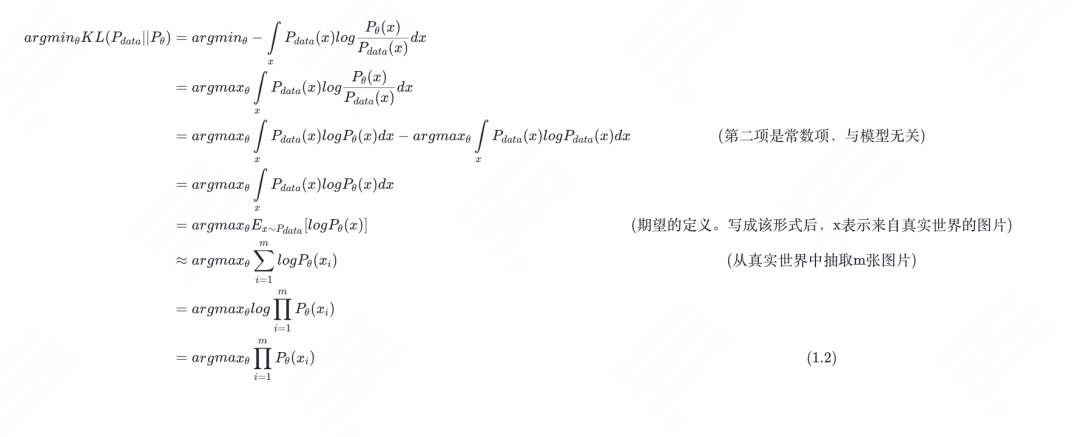
经过这一番转换,我们的优化目标从直觉上的“令模型输出的分布逼近真实图片分布”转变为"",我们也可以把这个新的目标函数通俗理解成“使得模型产生真实图片的概率最大”。如果一上来就直接把式(1.2)作为优化目标,可能会令很多朋友感到困惑。因此在这一步中,我们解释了为什么要用式(1.2)作为优化目标。
接下来,我们近一步来看,对式(1.2)还能做什么样的转换和拆解。
三、最大化ELBO(Evidence Lower Bound)
的本质就是要使得连乘中的每一项最大,也等同于使得最大。所以我们进一步来拆解。在开始拆解之前,让我们先回顾一下扩散模型的加噪与去噪过程,帮助我们更好地做数学推理。
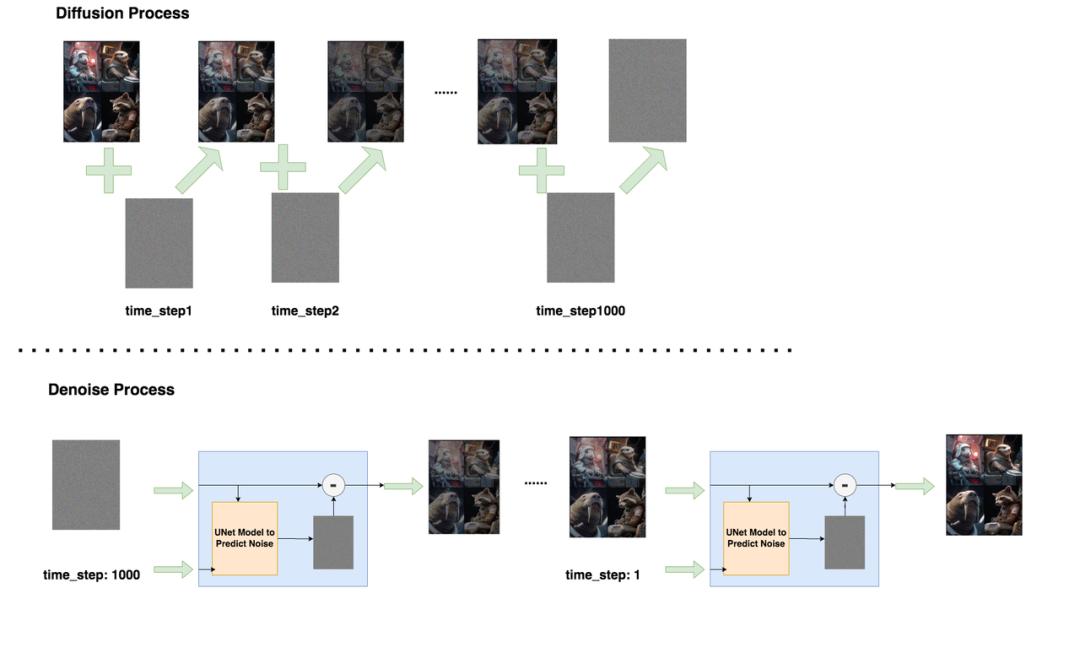
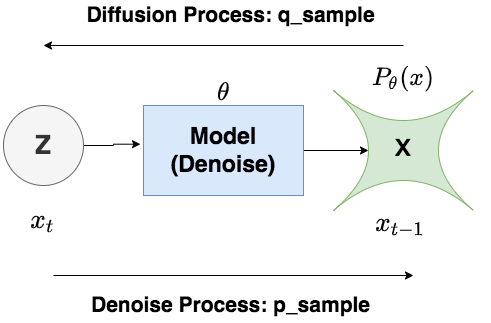
在Diffusion Process中,我们不过模型,而是按照设置好的加噪规则,随着time_step的变化,给图片添加噪声()。在Denoise Process中,我们则需要经过模型,对图片进行去噪,逐步将图片还原成原始的样子()。Diffusion过程中遵循的分布,我们记为,Denoise过程中遵循的分布,我们记为。严格来说,Diffusion过程遵循的分布应该记为,下标也表示模型参数,也就是说,“规则”也算一种“模型”。理论上,你想对Diffusion单独训练一套模型,也是没有问题的。为了表述严谨,我们接下来都将用进行表示。
现在我们可以回到拆解了,即然x和z与Diffusion和Denoise的过程密切相关,那么我们的目标就是要把拆解成用同时表达的形式:
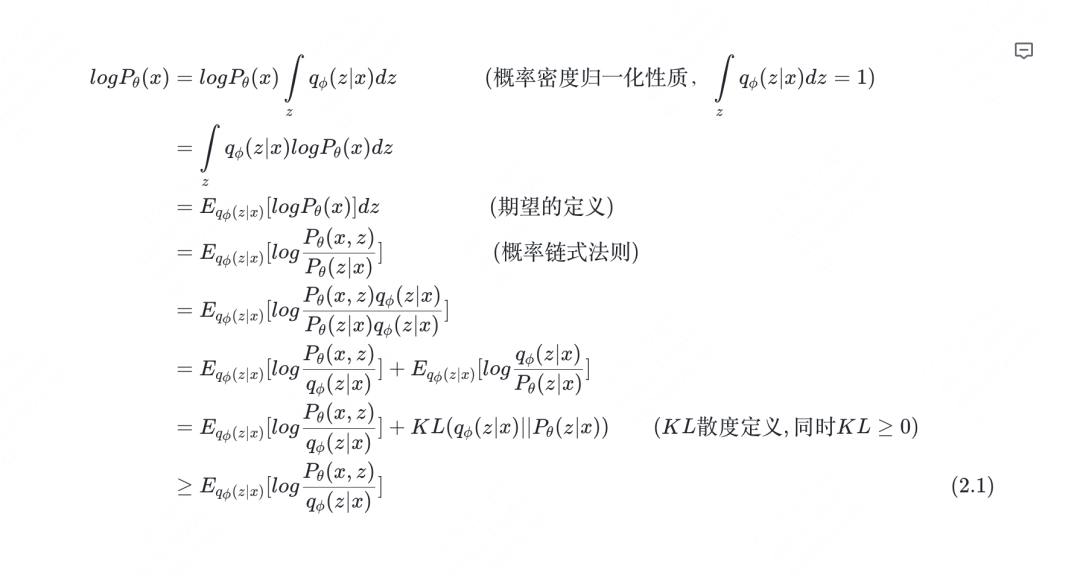
就被称为Evidence Lower Bound(ELBO)。到这一步为止,我们将最大化拆解成最大化ELBO,其中与diffusion过程密切相关,与denoise过程密切相关。
(2.1)这个公式一出,大家是不是很眼熟?没错,它其实也刻画了VAE的优化目标,所以这里我们才选用z而不是x来表示latent space中的变量。有些读者可能已经发现了,(2.1)描述的是一个time_step下的优化目标,但是我们的扩散模型,是有T个time_step的,因此,我们还需要把(2.1)再进一步扩展成链式表达的方式。在这一步扩展里,我们将不再使用z变量,取而代之的是用来表示,更符合我们对扩散模型的整体理解,则我们有:

其中,表示从真实世界中筛选出来的干净的图片,表示最后一个time_step加噪后的图片,通常是一个近似纯噪声。细心的读者可能发现,在(2.2)公式中,左边的是不是写成更合理呀?没错,因为扩散模型的目标就是去还原来自真实世界的。但这里为了前后表达统一,就不做修改了。读者们只要理解(2.2)的含义即可。
四、进一步拆解ELBO
复习一下,到这一步为止,我们经历了如下过程:
首先,总体优化目标是让模型产生的图片分布和真实图片分布尽量相似,也就是
对KL散度做拆解,将优化目标转变为,同时也等价于让连乘项中的每一项最大
对做拆解,以优化DDPM其中一个time_step为例,将优化目标转向最大化下界(ELBO)
以全部time_step为例,将优化目标转变为,也就是式(2.2)
恭喜你充满耐心地看到这一步了!接下来,我们还需要再耐心对式(2.2)进行拆解,毕竟现在它只是一个偏抽象的形式,因此我们还需对p与q再做具象化处理。之前我们提过,下标的意思是强调从理论上来说,diffusion过程可以通过训练一个模型来加噪,而并非只能通过规则加噪。这两种方法在数学上都是成立的。由于DDPM采用了后者,因此在接下来的过程中,我们将会去掉下标。
式(2.2)的进一步拆解如下:
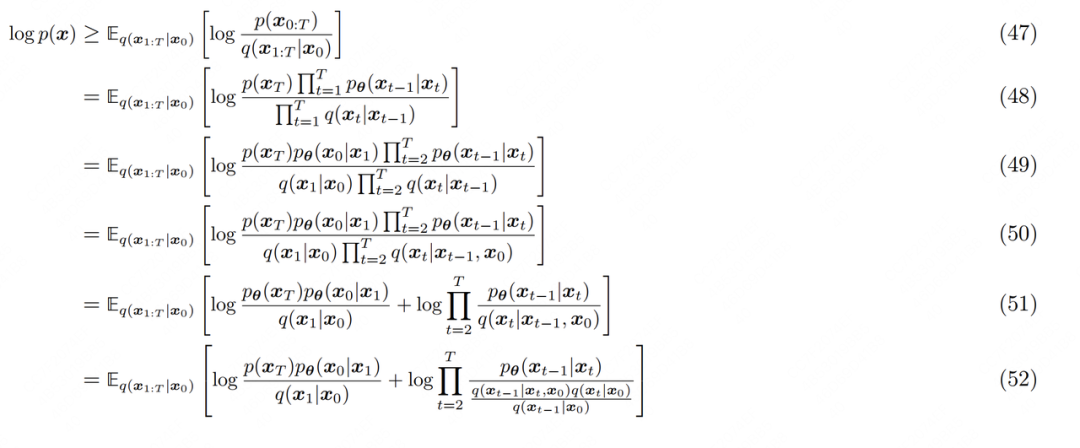
(48):分子上,因为已是个近似高斯分布的纯噪声,因此它的分布p是已知的,和模型无关,所以将单独提炼出。分子与分母的其余项则是因为扩散模型遵循马尔可夫链性质,因此可以通过链式连乘规则进行改写
(50):表示来自真实世界的干净图片,它是diffusion过程的起源,任意都可由推导而来,因此可将改写成
(52):根据多变量条件概率的贝叶斯链式法则进行改写,即:
当然多变量条件概率的改写方式有很多种,根据需要我们选择了上面的这一种
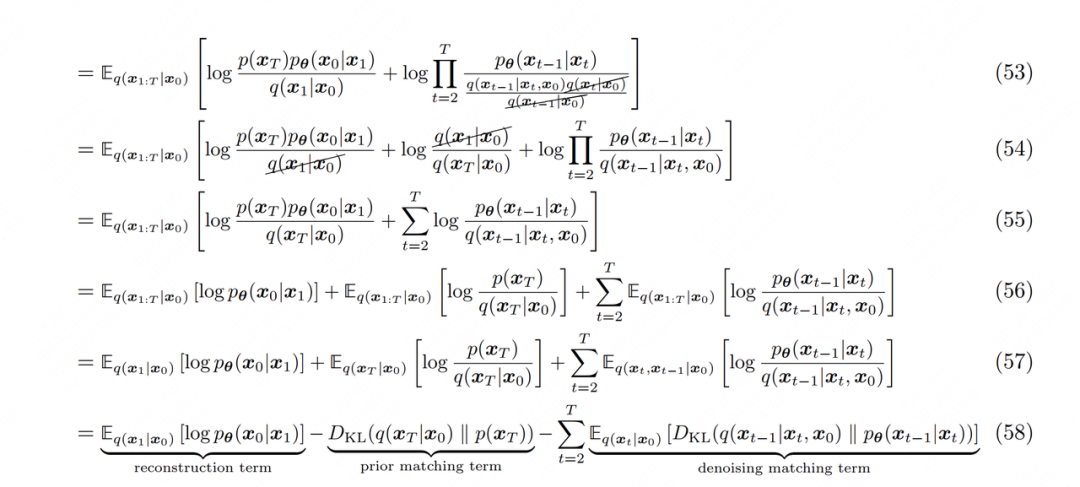
(54):由于q是既定的,可以看作是一个常量,因此可增加一项
(56)~(57):根据期望项中涉及到的具体元素,调整期望E的下标
(58):根据KL散度的定义重写最后两项。其中prior matching term可看作是常量,reconstruction term和denoising matching term则是和模型密切相关的两项。由于两者间十分相似,因此接下来我们只需要特别关注denoising matching term如何拆解即可。
五、重参数与噪声预测
现在,我们的优化目标转为最大化,我们继续对该项进行拆解。
首先我们来看一项。
根据多变量条件概率的链式法则,我们有:
现在,我们分别来看,,具体长什么样子。
5.1 重参数
5.1.1 为什么需要重参数
回顾模型架构篇,我们曾经提过,最朴素的diffusion加噪规则是,在每一个time_step中都sample一次随机噪声,使得:
在架构篇中,我们直接指出,即筛选的噪声是来自一个标准高斯分布。但是为什么要这么设计呢?
我们假设真实世界的图片服从这样的高斯分布,而现在我们的模型就是要去学习这个分布,更具象点,假设模型遵从的分布是,我们的目的就是让逼近,逼近。
那么在diffusion过程中,更符合直觉的做法是,模型从采样出一个噪声,然后在denoise的过程中去预测这个噪声,这样就能把梯度传递到上,使得模型在预测噪声的过程中习得真实图片的分布。
但这样做产生的问题是,实际上梯度并不能传递到上。举个简单的例子,假设你从随机采样出了一个3,你怎么将这个随机的采样结果和联系起来呢?也就是说,在diffusion过程中,如果我们从一个带参数的分布中做数据采样,在denoise过程中,我们无法将梯度传递到这个参数上。
针对这个问题,有一个简单的解决办法:我从一个确定的分布(不带参数)中做数据采样,不就行了吗?比如,我从先采样出一个,然后再令最终的采样结果z为:。这样我不就能知道z和间的关系了?同时根据高斯分布性质,z也服从分布。
以上“从一个带参数的分布中进行采样”转变到“从一个确定的分布中进行采样”,以解决梯度无法传递问题的方法,就被称为“重参数”(reparamterization)。关于重参数原理的更多细节,推荐大家阅读这篇文章(https://spaces.ac.cn/archives/6705)
5.1.2 重参数的具体方法
到这一步根据重参数的思想,我们可以把转变为了。但是现在的diffusion过程还是太繁琐:每一个time_step都要做一次采样,等我后续做denoise过程去预测噪声,传播梯度的时候,参数不仅在这个time_step有,在之前的一系列time_steps中都有,这不是给我计算梯度造成困扰了吗?注意到在diffusion过程中,随着time_step的增加,图片中含有的噪声是越来越多的,那我能不能设定一个函数,使得每个time_step的图片都能由原始图片加噪推导而来,然后使得噪声的比例随着time_step增加而变大?这样我不就只需要一次采样了吗?
当然没有问题,DDPM采用的做法是:
(1)首先,设置超参数,满足随着t增大,逐渐变大。
(2)令:
易推出随着t增大而逐渐变小
(3)则任意时刻的都可以由表示出:
我们通过图例来更好理解上面的三步骤:
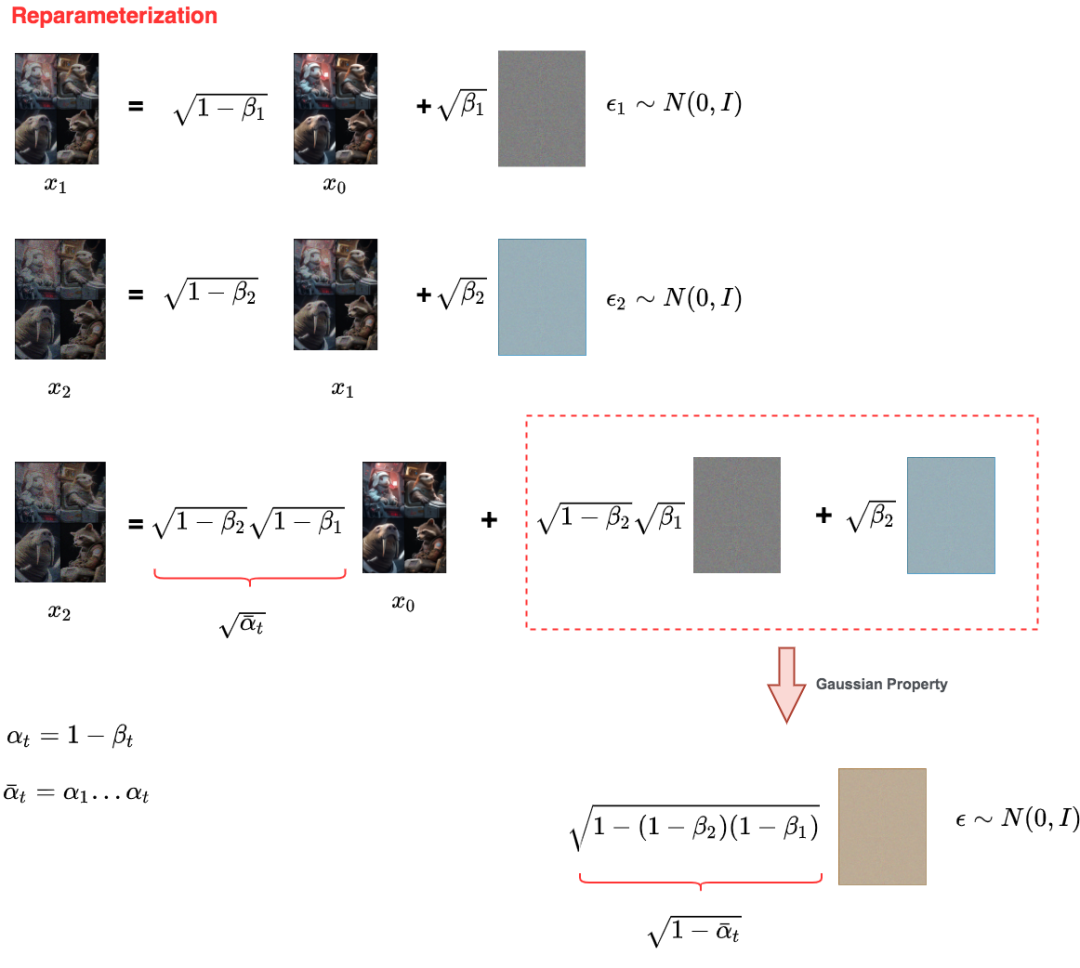
详细的过程都在图例中表示出了,这里不做赘述。
5.2 噪声预测
讲完了重参数的部分,我们继续回到刚才拆解的步骤上来,复习一下,我们已经将ELBO拆解成,现在我们的关注点在q分布上,而q分布又由以下三项组成:
,我们继续来看这三项要怎么具体表示出来。
由章节5.1.2,我们知道:
则任意的关系都可以由此推出:
(友情提示:大家记得看5.1.2中的图例区分哦,不是typo)。
同时,我们已经知道(假设)都服从高斯分布,则根据高斯分布的性质,我们有:
对于高斯分布,知道了均值和方差,我们就可以把它具体的概率密度函数写出来:
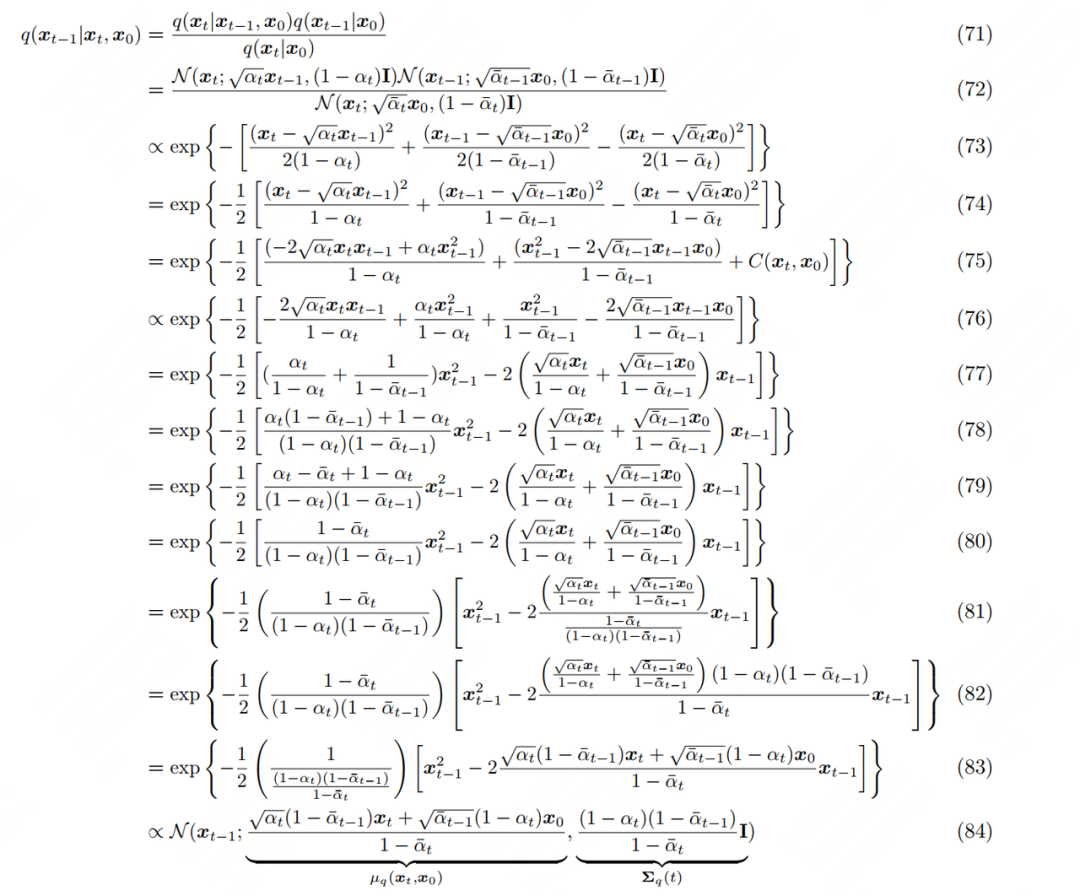
经过这样的一顿爆肝推导,我们终于将的分布写出来了(84)。也就是我们当前优化目标中的q部分。
现在,我们来看部分,根据优化目标,此时我们需要让p和q的分布尽量接近:
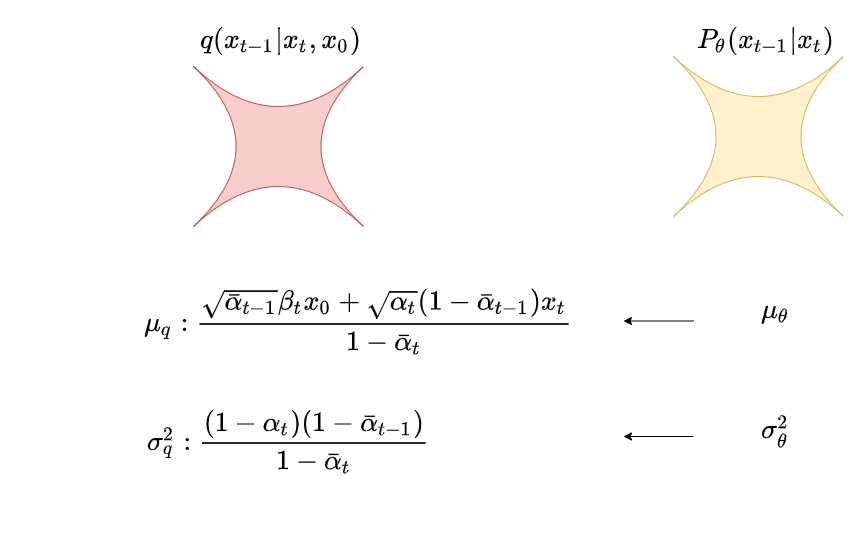
而让p和q的分布接近,等价与让。注意到其实是一个常量,它只和超参有关。在DDPM中,为了简化优化过程,并且使训练更稳定,就假设也按此种方式固定下来了。在后续的扩散模型(例如GLIDE)中,则引入对方差的预测。在DDPM中,只预测均值。
好,那么预测均值,到底是在预测什么东西呢?我们对再做改写,主要是根据我们设置的diffusion规则,将用进行表示:
观察到,式(5.1)的结果在diffusion过程中就已决定好。所以现在对于,我只要让它在denoise的过程里,预测出,使得,然后令:
这样,我不就能使得和的分布一致了吗!
此刻!是不是一道光在你的脑海里闪过!一切都串起来了,也就是说,只要在denoise的过程中,让模型去预测噪声,就可以达到让“模型产生图片的分布”和“真实世界的图片分布”逼近的目的!
5.3 再次理解training和sampling
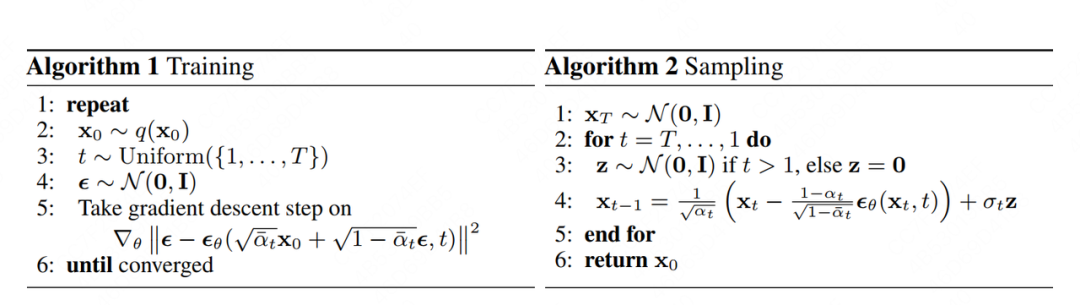
现在,我们再来回顾training和sampling的过程,在training的过程中,我们只需要去预测噪声,就能在数学上使得模型学到的分布和真实的图片分布不断逼近。而当我们使用模型做sampling,即去测试模型能生成什么质量的图片时,我们即可由式(5.1)中的推导结论,从推导,直至还原出。注意到这里,其中是我们式(5.1)中要逼近的均值真值;,则正是我们已经固定住的方差。
关于training和sampling更详细的实操解说,可以参见模型架构篇。
六、总结(必看)
恭喜你坚持看到了这里!我们来把整个推导串成完整的逻辑链:
(1)首先,DDPM总体优化目标是让模型产生的图片分布和真实图片分布尽量相似,也就是。同时,我们假设真实世界的图片符合高斯分布:。因此我们的目标就是要让习得
(2)但是这两个客观存在的真值是未知的,因此我们必须对KL散度进行不断拆解,直至能用确定的形式将它表示出来。
(3)对KL散度做初步拆解,将优化目标转变为,同时也等价于让连乘项中的每一项最大
(4)继续对做拆解,以优化DDPM其中一个time_step为例,将优化目标转向最大化下界(ELBO)
(5)依照马尔可夫性质,从1个time_step推至所有的time_steps,将(4)中的优化目标改写为,也就是式(2.2)
(6)对式(2.2)继续做拆解,将优化目标变为
(7)先来看(6)中的一项,注意到这和diffusion的过程密切相关。在diffusion的过程中,通过重参数的方法进行加噪,再经过一顿爆肝推导,得出,易看出该分布中方差是只和我们设置的超参数相关的常量。
(8)再来看(6)中的一项,下标说明了该项和模型相关。为了让p和q的分布接近,我们需要让p去学习q的均值和方差。由于方差是一个常量,在DDPM中,假设它是固定的,不再单独去学习它(后续的扩散模型,例如GLIDE则同时对方差也做了预测)。因此现在只需要学习q的均值。经过一顿变式,可以把q的均值改写成。因此,这里只要让模型去预测噪声,使得,就能达到达到(1)中的目的!
七、参考
在学习DDPM的过程中,我也看了很多参考资料,但发现很难将整个推导过程串成一条符合思维惯性的逻辑链,因此对很多细节也是一知半解。直到我看到李宏毅老师对扩散模型原理的讲解(从分布相似性入手),以及阅读了google的一篇关于扩散模型数学推理的综述,才恍然大悟。自己动手推导后,从更符合我惯性思维的角度入手,写了这篇文章。因此,我也把我认为非常有帮助的参考资料列在下面,大家可以补充阅读。
-
源码
+关注
关注
8文章
682浏览量
31086 -
函数
+关注
关注
3文章
4406浏览量
66829 -
模型
+关注
关注
1文章
3648浏览量
51710
原文标题:深入浅出扩散模型(Diffusion Model)系列:基石DDPM(人人都能看懂的数学原理篇)
文章出处:【微信号:GiantPandaCV,微信公众号:GiantPandaCV】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录





 工商网监
工商网监
评论