 LPVR-DUO:基于差分IMU的车载VR/AR的LPVR中间件
LPVR-DUO:基于差分IMU的车载VR/AR的LPVR中间件

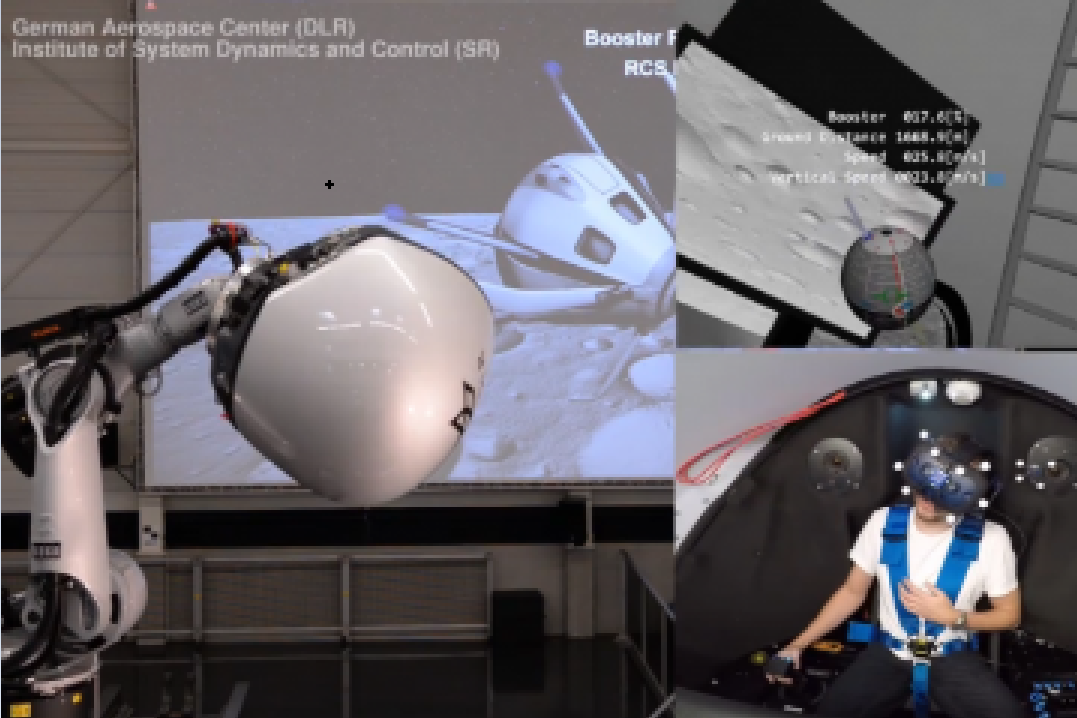
针对汽车等移动载体中高精度高实时性地捕捉VR/AR头盔的应用难点广州阿路比电子科技有限公司提供名为LPVR-DUO的软件中间层,为用户能在移动载体中使用VR/AR头盔提供先进的技术保障。此系统允许多个光学系统和头盔惯性测量单元(IMU),车体惯性单元的灵活组合,实现头盔用户相对于车体坐标系的位置和姿态的精准捕捉计算。针对不同的头盔厂家,如Varjo,VIVE pro, Quest Pro,Pimax等,通过LPVR软件中间层在Unreal,Unity等三维内容设计引擎中提供完美的软件数据对接,最大程度降低内容开发者的底层硬件技术开发负担。
★支持的头显设备:VIVE系列,Varjo系列,Quest系列,Pimax
★匹配的光学摄像头系统:ART、Optitrack、VICON、其他基于VRPN 的跟踪方案
★匹配的软件:Unity,Unreal,Autodesk VRED,所有与SteamVR兼容的应用
★支持的手柄设备:VIVE 手柄
★移动车体的IMU:LPMS-IG1 CAN
★定位精度:1-10mm(取决于光学跟踪设置)
★姿态精度:0.2°
★跟踪延时:零延迟(带有运动预测算法)
★跟踪范围:无限制(具体取决于光学系统参数)
★操作系统:Windows 10或以上
审核编就 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Ar
+关注
关注
25文章
5236浏览量
175437 -
IMU
+关注
关注
6文章
403浏览量
47585 -
vr
+关注
关注
34文章
9692浏览量
156538
发布评论请先 登录
相关推荐
热点推荐
IMU+多相机高速联合自动标定方案
随着视觉惯性传感器在自动驾驶、机器人、AR/VR 等领域规模化落地,多相机+IMU 联合标定需求呈爆发式增长,多相机+IMU 联合标定领域尚属空白。
感算商城联合知名方案公司推出国
发表于 10-23 14:04
STM32U575VGT6在cubeMX中没有FATFS中间件,是不支持吗?
STM32U575VGT6在cubeMX中没有FATFS中间件,是不支持?还是待开发?现在这块板子使用FATFS只能自己手动移植吗?
发表于 07-30 06:46
中科创达与ETAS推出预集成多域中间件解决方案
近日,ETAS 与 ThunderSoft(中科创达)宣布双方建立了紧密合作关系,并将在今年6月24日至25日于路德维希堡举行的汽车电子大会上,联合展示其新开发的、面向高性能计算(HPC)SoC 车载系统的多域预集成中间件解决方案。
晶体晶振在AR/VR设备中的作用
在 AR/VR 的奇妙世界里,每一次精彩呈现都离不开精准频率的技术支撑。晶体晶振,作为 AR/VR 设备的核心元件,在其中默默发挥着无可替代的关键作用。


STM32MP131C CbueMX中间件无RTOS选项是怎么回事?
如题,STM32MP131C CbueMX中间件无RTOS选项,对比选择STM32MP157芯片是有的,怎么查这部分资料呢
发表于 03-14 06:59
差分探头的缺点剖析
在电子测量领域,差分探头是一种常用的工具,用于精确测量两个信号之间的差值。它在许多应用中发挥着关键作用,然而,如同任何测量设备一样,差分探头也并非完美无缺,存在着一些不可忽视的缺点。
2024年AI开发者中间件工具生态全面总结
进行多方位的总结和梳理。 在第二章《TOP 101-2024 大模型观点》中,生成式 AI 开发者莫尔索总结了 2024 年 AI 开发者中间件工具生态。 全文如下: AI 开发者中间件工具生态
AR和VR中的计算机视觉
增强现实(AR)和虚拟现实(VR)正在彻底改变我们与外部世界的互动方式。即便是在引人入胜的沉浸式叙事和交互体验背后,这一切魔法都是通过尖端技术的精妙协调创造出来的。增强现实(AR)与虚拟现实(

差分平衡电平接口的原理与优势
差分平衡电平接口,作为一种先进的信号传输技术,它通过一对接线端A和B的相对输出电压(uA-uB)来精确传递信号,这一独特设计使得差分平衡电平接口在复杂噪声环境中展现出卓越的性能。 一、
恩智浦强化汽车和工业物联网业务:6.25 亿美元收购中间件企业 TTTech Auto
恩智浦 NXP 荷兰当地时间本月 7 日宣布已同 TTTech Auto 达成最终协议,计划以 6.25 亿美元(当前约 45.86 亿元人民币)的现金收购这家奥地利汽车中间件企业,强化自身

ADS1299套件的可编程增益是只有在差分输入情况下才可用吗?
昂问一下ADS1299套件的可编程增益是只有在差分输入情况下才可用吗?我用AIN口输入单端信号 调节PGA大于1时信号就不对了
发表于 12-26 06:29
零念科技PowerD-Sch中间件获ISO 26262 ASIL D级认证
近日,国际知名的第三方检测认证机构TÜV南德意志集团,正式向零念科技颁发的PowerD-Sch确定性调度中间件ISO 26262:2018 ASIL D级功能安全产品认证证书。 这一证书的获得
东方通联合openEuler社区即将开启云原生开源中间件 Meetup北京站
! openEuler社区云原生开源中间件Meetup北京站将于12月27日举办,由东方通与openEuler社区携手主办。此次交流活动特邀多位业内专家,分享实战案例与前沿技术解析,为技术爱好者、行业从业者、高校学生等加油充电,深化技术交流与学习。同时沙





 工商网监
工商网监
评论