 SLAM框架-常见方案对比
SLAM框架-常见方案对比

Simultaneous Localization and Mapping,即时定位与地图构建技术。无论在室内、野外、空中还是水下,SLAM是机器人进入未知环境遇到的第一个问题。本期将给大家介绍SLAM的基础知识:传感器与视觉SLAM框架。
近来年,智能机器人技术在世界范围内得到了大力发展。人们致力于把机器人用于实际场景:从室内的移动机器人,到野外的自动驾驶汽车、空中的无人机、水下环境的探测机器人等等,均得到了广泛的关注。
在大多数场合中,我们研究机器人会碰到一个基础性的困难,那就是定位和建图,也就是所谓的SLAM技术。没有准确的定位与地图,扫地机就无法在房间自主地移动,只能随机乱碰;家用机器人就无法按照指令准确到达某个房间。此外,在虚拟现实(Virtual Reality)和增强现实技术(Argument Reality)中,没有SLAM提供的定位,用户就无法在场景中漫游。在这几个应用领域中,人们需要SLAM向应用层提供空间定位的信息,并利用SLAM的地图完成地图的构建或场景的生成。
传感器
当我们谈论SLAM时,最先问到的就是传感器。SLAM的实现方式与难度和传感器的形式与安装方式密切相关。传感器分为激光和视觉两大类,视觉下面又分三小方向。下面就带你认识这个庞大家族中每个成员的特性。
1. 传感器之激光雷达
激光雷达是最古老,研究也最多的SLAM传感器。它们提供机器人本体与周围环境障碍物间的距离信息。常见的激光雷达,例如SICK、Velodyne还有我们国产的rplidar等,都可以拿来做SLAM。激光雷达能以很高精度测出机器人周围障碍点的角度和距离,从而很方便地实现SLAM、避障等功能。 主流的2D激光传感器扫描一个平面内的障碍物,适用于平面运动的机器人(如扫地机等)进行定位,并建立2D的栅格地图。这种地图在机器人导航中很实用,因为多数机器人还不能在空中飞行或走上台阶,仍限于地面。在SLAM研究史上,早期SLAM研究几乎全使用激光传感器进行建图,且多数使用滤波器方法,例如卡尔曼滤波器与粒子滤波器等。 激光的优点是精度很高,速度快,计算量也不大,容易做成实时SLAM。缺点是价格昂贵,一台激光动辄上万元,会大幅提高一个机器人的成本。因此激光的研究主要集中于如何降低传感器的成本上。对应于激光的EKF-SLAM理论方面,因为研究较早,现在已经非常成熟。与此同时,人们也对EKF-SLAM的缺点也有较清楚的认识,例如不易表示回环、线性化误差严重、必须维护路标点的协方差矩阵,导致一定的空间与时间的开销,等等。
2. 传感器之视觉SLAM
视觉SLAM是21世纪SLAM研究热点之一,一方面是因为视觉十分直观,不免令人觉得:为何人能通过眼睛认路,机器人就不行呢?另一方面,由于CPU、GPU处理速度的增长,使得许多以前被认为无法实时化的视觉算法,得以在10 Hz以上的速度运行。硬件的提高也促进了视觉SLAM的发展。
以传感器而论,视觉SLAM研究主要分为三大类:单目、双目(或多目)、RGBD。其余还有鱼眼、全景等特殊相机,但是在研究和产品中都属于少数。此外,结合惯性测量器件(Inertial Measurement Unit,IMU)的视觉SLAM也是现在研究热点之一。就实现难度而言,我们可以大致将这三类方法排序为:单目视觉>双目视觉>RGBD。
单目相机: 单目相机SLAM简称MonoSLAM,即只用一支摄像头就可以完成SLAM。这样做的好处是传感器特别的简单、成本特别的低,所以单目SLAM非常受研究者关注。相比别的视觉传感器,单目有个最大的问题,就是没法确切地得到深度。这是一把双刃剑。
一方面,由于绝对深度未知,单目SLAM没法得到机器人运动轨迹以及地图的真实大小。直观地说,如果把轨迹和房间同时放大两倍,单目看到的像是一样的。因此,单目SLAM只能估计一个相对深度,在相似变换空间Sim(3)中求解,而非传统的欧氏空间SE(3)。如果我们必须要在SE(3)中求解,则需要用一些外部的手段,例如GPS、IMU等传感器,确定轨迹与地图的尺度(Scale)。
另一方面,单目相机无法依靠一张图像获得图像中物体离自己的相对距离。为了估计这个相对深度,单目SLAM要靠运动中的三角测量,来求解相机运动并估计像素的空间位置。即是说,它的轨迹和地图,只有在相机运动之后才能收敛,如果相机不进行运动时,就无法得知像素的位置。同时,相机运动还不能是纯粹的旋转,这就给单目SLAM的应用带来了一些麻烦,好在日常使用SLAM时,相机都会发生旋转和平移。不过,无法确定深度同时也有一个好处:它使得单目SLAM不受环境大小的影响,因此既可以用于室内,又可以用于室外。
双目相机: 相比于单目,双目相机通过多个相机之间的基线,估计空间点的位置。与单目不同的是,立体视觉既可以在运动时估计深度,亦可在静止时估计,消除了单目视觉的许多麻烦。不过,双目或多目相机配置与标定均较为复杂,其深度量程也随双目的基线与分辨率限制。通过双目图像计算像素距离,是一件非常消耗计算量的事情,现在多用FPGA来完成。
RGBD: RGBD = RGB + Depth Map RGBD相机是2010年左右开始兴起的一种相机,它最大的特点是可以通过红外结构光或Time-of-Flight(飞行时间)原理,直接测出图像中各像素离相机的距离。因此,它比传统相机能够提供更丰富的信息,也不必像单目或双目那样费时费力地计算深度。目前常用的RGBD相机包括Kinect/Kinect V2(微软公司开发)、Xtion(华硕)等。不过,现在多数RGBD相机还存在测量范围窄、噪声大、视野小等诸多问题。出于量程的限制,主要用于室内SLAM。
视觉SLAM框架
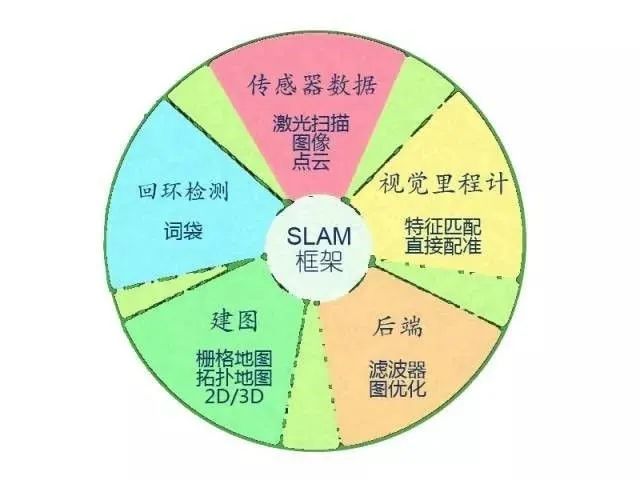
视觉SLAM几乎都有一个基本的框架 。一个SLAM系统分为四个模块(除去传感器数据读取):VO、后端、建图、回环检测。这里我们简要介绍各模块的涵义,之后再详细介绍其使用方法。
SLAM框架之视觉里程计
Visual Odometry,即视觉里程计。它估计两个时刻机器人的相对运动(Ego-motion)。在激光SLAM中,我们可以将当前的观测与全局地图进行匹配,用ICP求解相对运动。而对于相机,它在欧氏空间里运动,我们经常需要估计一个三维空间的变换矩阵——SE3或Sim3(单目情形)。求解这个矩阵是VO的核心问题,而求解的思路,则分为基于特征的思路和不使用特征的直接方法。
特征匹配
基于特征的方法是目前VO的主流方式。对于两幅图像,首先提取图像中的特征,然后根据两幅图的特征匹配,计算相机的变换矩阵。最常用的是点特征,例如Harris角点、SIFT、SURF、ORB。如果使用RGBD相机,利用已知深度的特征点,就可以直接估计相机的运动。给定一组特征点以及它们之间的配对关系,求解相机的姿态,该问题被称为PnP问题(Perspective-N-Point)。PnP可以用非线性优化来求解,得到两个帧之间的位置关系。
不使用特征进行VO的方法称为直接法。它直接把图像中所有像素写进一个位姿估计方程,求出帧间相对运动。例如,在RGBD SLAM中,可以用ICP(Iterative Closest Point,迭代最近邻)求解两个点云之间的变换矩阵。对于单目SLAM,我们可以匹配两个图像间的像素,或者像图像与一个全局的模型相匹配。直接法的典型例子是SVO和LSD-SLAM。它们在单目SLAM中使用直接法,取得了较好的效果。目前看来,直接法比特征VO需要更多的计算量,而且对相机的图像采集速率也有较高的要求。
SLAM框架之后端
在VO估计帧间运动之后,理论上就可以得到机器人的轨迹了。然而视觉里程计和普通的里程计一样,存在累积误差的问题(Drift)。直观地说,在t1和t2时刻,估计的转角比真实转角少1度,那么之后的轨迹就全部少掉了这1度。时间一长,建出的房间可能由方形变成了多边形,估计出的轨迹亦会有严重的漂移。所以在SLAM中,还会把帧间相对运动放到一个称之为后端的程序中进行加工处理。
早期的SLAM后端使用滤波器方式。由于那时还未形成前后端的概念,有时人们也称研究滤波器的工作为研究SLAM。SLAM最早的提出者R. Smith等人就把SLAM建构成了一个EKF(Extended Kalman Filter,扩展卡尔曼滤波)问题。他们按照EKF的形式,把SLAM写成了一个运动方程和观测方式,以最小化这两个方程中的噪声项为目的,使用典型的滤波器思路来解决SLAM问题。
当一个帧到达时,我们能(通过码盘或IMU)测出该帧与上一帧的相对运动,但是存在噪声,是为运动方程。同时,通过传感器对路标的观测,我们测出了机器人与路标间的位姿关系,同样也带有噪声,是为观测方程。通过这两者信息,我们可以预测出机器人在当前时刻的位置。同样,根据以往记录的路标点,我们又能计算出一个卡尔曼增益,以补偿噪声的影响。于是,对当前帧和路标的估计,即是这个预测与更新的不断迭代的过程。
21世纪之后,SLAM研究者开始借鉴SfM(Structure from Motion)问题中的方法,把捆集优化(Bundle Adjustment)引入到SLAM中来。优化方法和滤波器方法有根本上的不同。它并不是一个迭代的过程,而是考虑过去所有帧中的信息。通过优化,把误差平均分到每一次观测当中。在SLAM中的Bundle Adjustment常常以图的形式给出,所以研究者亦称之为图优化方法(Graph Optimization)。图优化可以直观地表示优化问题,可利用稀疏代数进行快速的求解,表达回环也十分的方便,因而成为现今视觉SLAM中主流的优化方法。
SLAM框架之回环检测
回环检测,又称闭环检测(Loop closure detection),是指机器人识别曾到达场景的能力。如果检测成功,可以显著地减小累积误差。回环检测实质上是一种检测观测数据相似性的算法。对于视觉SLAM,多数系统采用目前较为成熟的词袋模型(Bag-of-Words, BoW)。词袋模型把图像中的视觉特征(SIFT, SURF等)聚类,然后建立词典,进而寻找每个图中含有哪些“单词”(word)。也有研究者使用传统模式识别的方法,把回环检测建构成一个分类问题,训练分类器进行分类。
回环检测的难点在于,错误的检测结果可能使地图变得很糟糕。这些错误分为两类:1.假阳性(False Positive),又称感知偏差(Perceptual Aliasing),指事实上不同的场景被当成了同一个;2.假阴性(False Negative),又称感知变异(Perceptual Variability),指事实上同一个场景被当成了两个。感知偏差会严重地影响地图的结果,通常是希望避免的。一个好的回环检测算法应该能检测出尽量多的真实回环。研究者常常用准确率-召回率曲线来评价一个检测算法的好坏。 参考文章
双目立体视觉的数学原理
双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中,双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。 双目视觉有的时候我们也会把它称为体视,是人类利用双眼获取环境三维信息的主要途径。从目前来看,随着机器视觉理论的发展,双目立体视觉在机器视觉研究中发回来看了越来越重要的作用。本篇帖子主要研究了双目视觉的数学原理。
双目立体视觉的数学原理
双目立体视觉是基于视差,由三角法原理进行三维信息的获取,即由两个摄像机的图像平面和北侧物体之间构成一个三角形。已知两个摄像机之间的位置关系,便可以获得两摄像机公共视场内物体的三维尺寸及空间物体特征点的三维坐标。所以,双目视觉系统一般由两个摄像机构成。
双目立体视觉三维测量原理
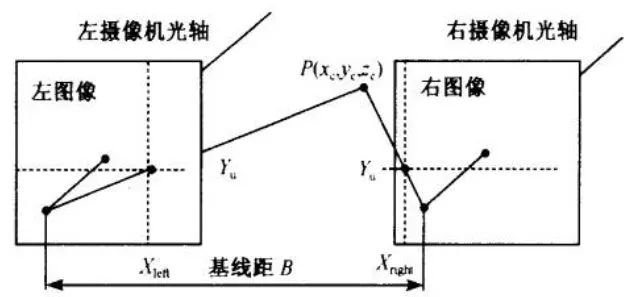
上图所示为简单的平视双目立体成像原理图,两摄像机的投影中心连线的距离,即基线距离B。两摄像机在同一时刻观看时空物体的同一特征点P,分别在“左眼”和“右眼”上获取了点P的图像,他们的坐标分别为Pleft=(Xleft,Yleft);Pright=(Xright,Yright)。将定两摄像机的图像在同一平面上,则特征点P的图像坐标的Y坐标一定是相同的,即Yleft = Yright =Y。由三角几何关系可以得到如下关系式:
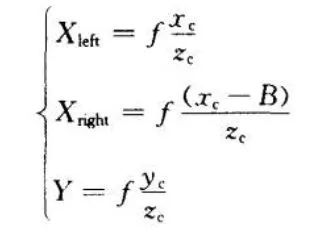
则视差为:Disparity=Xleft-Xright.由此可以计算出特征点P在摄像机坐标系下的三维坐标:
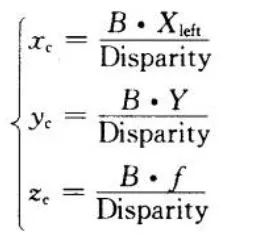
因此,左摄像机像面上的任意一点只要能在右摄像机像面上找到对应的匹配点,就完全可以确定该点的三维坐标。这种方法是点对点的运算,像平面上所有点只要存在相应的匹配点,就可以参与上述运算,从而获取对应的三维坐标。
双目立体视觉数学模型
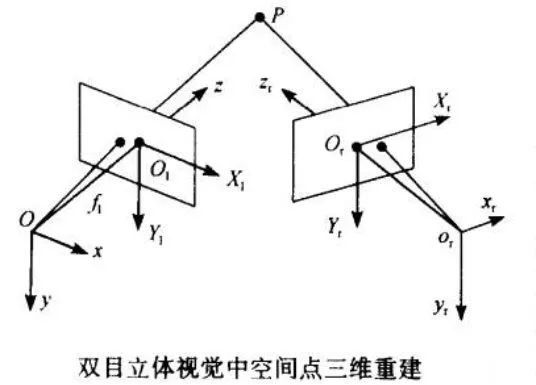
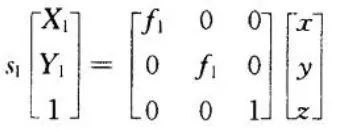
在分析了最简单的平视双目立体视觉的三维测量原理基础上,现在我们就有能力来考虑一般情况。如上图所示,设左摄像机O-xyz位于世界坐标系原点,且没有发生旋转,图像坐标系为Ol-X1Y1,有效焦距为fl;右摄像机坐标系为Or-xyz,图像坐标系为Or-XrYr,有效焦距为fr。那么根据摄像机的投射模型我们就能得到如下关系式:
因为O-xyz坐标系与Or-xryrzr坐标系之间的位置关系可通过空间转换矩阵MLr表示为:
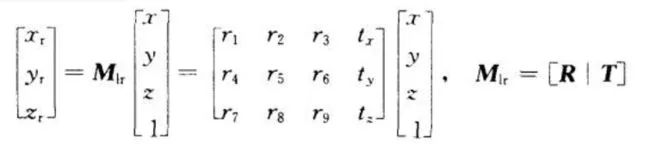
同理,对于O-xyz坐标系中的空间点,两个摄像机面点之间的对应关系可以表示为:
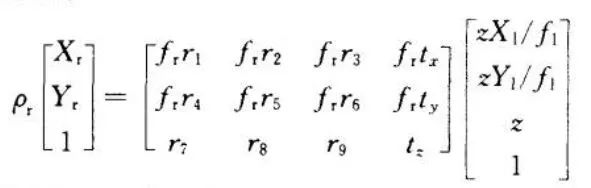
于是,空间点三维坐标可以表示为
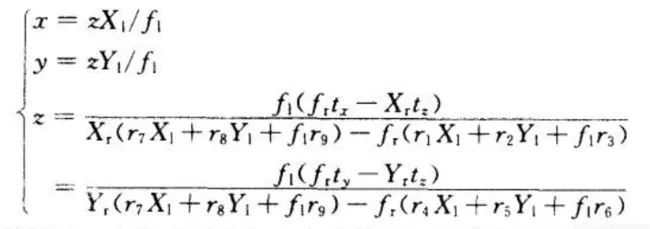
因此,只要我们通过计算机标定技术获得左右计算机内参数/焦距fr,fl和空间点在左右摄像机中的图像坐标,就能够重构出被测点的三维空间坐标。

1.双目方案,最大的问题在于实现算法需要很高的计算资源,导致实时性很差,而且基本跟分辨率,检测精度挂钩。也就是说,分辨率越高,要求精度越高,则计算越复杂,同时,纯双目方案受光照,物体纹理性质影响。
2.结构光方案,目的就是为了解决双目中匹配算法的复杂度和鲁棒性问题而提出,该方案解决了大多数环境下双目的上述问题。但是,在强光下,结构光核心技术激光散斑会被淹没。因此,不合适室外。同时,在长时间监控方面,激光发射设备容易坏,重新换设备后,需要重新标定。
3.TOF方案,传感器技术不是很成熟,因此,分辨率较低,成本高,但由于其原理与另外两种完全不同,实时性高,不需要额外增加计算资源,几乎无算法开发工作量,是未来。
审核编辑:刘清
-
激光器
+关注
关注
19文章
3015浏览量
64806 -
激光雷达
+关注
关注
982文章
4548浏览量
197088 -
无人驾驶
+关注
关注
100文章
4309浏览量
127097 -
3D传感器
+关注
关注
4文章
121浏览量
27101 -
slam技术
+关注
关注
0文章
13浏览量
1746
原文标题:3D 视觉 相关知识-SLAM框架-常见方案对比
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
GSLAM:一套通用的SLAM框架与基准

基于多模态语义SLAM框架
HOOFR-SLAM的系统框架及其特征提取
检测LED单元板的常见方法
电平转换常见方法的汇总比较资料下载

经典视觉SLAM框架开源方案
箱式变压器保养的常见方法和事项
视觉SLAM开源方案汇总 视觉SLAM设备选型

视觉SLAM是什么?视觉SLAM的工作原理 视觉SLAM框架解读

一种适用于动态环境的自适应先验场景-对象SLAM框架

FPGA和GPU加速的视觉SLAM系统中特征检测器研究




评论