 proteus双机仿真系统
proteus双机仿真系统

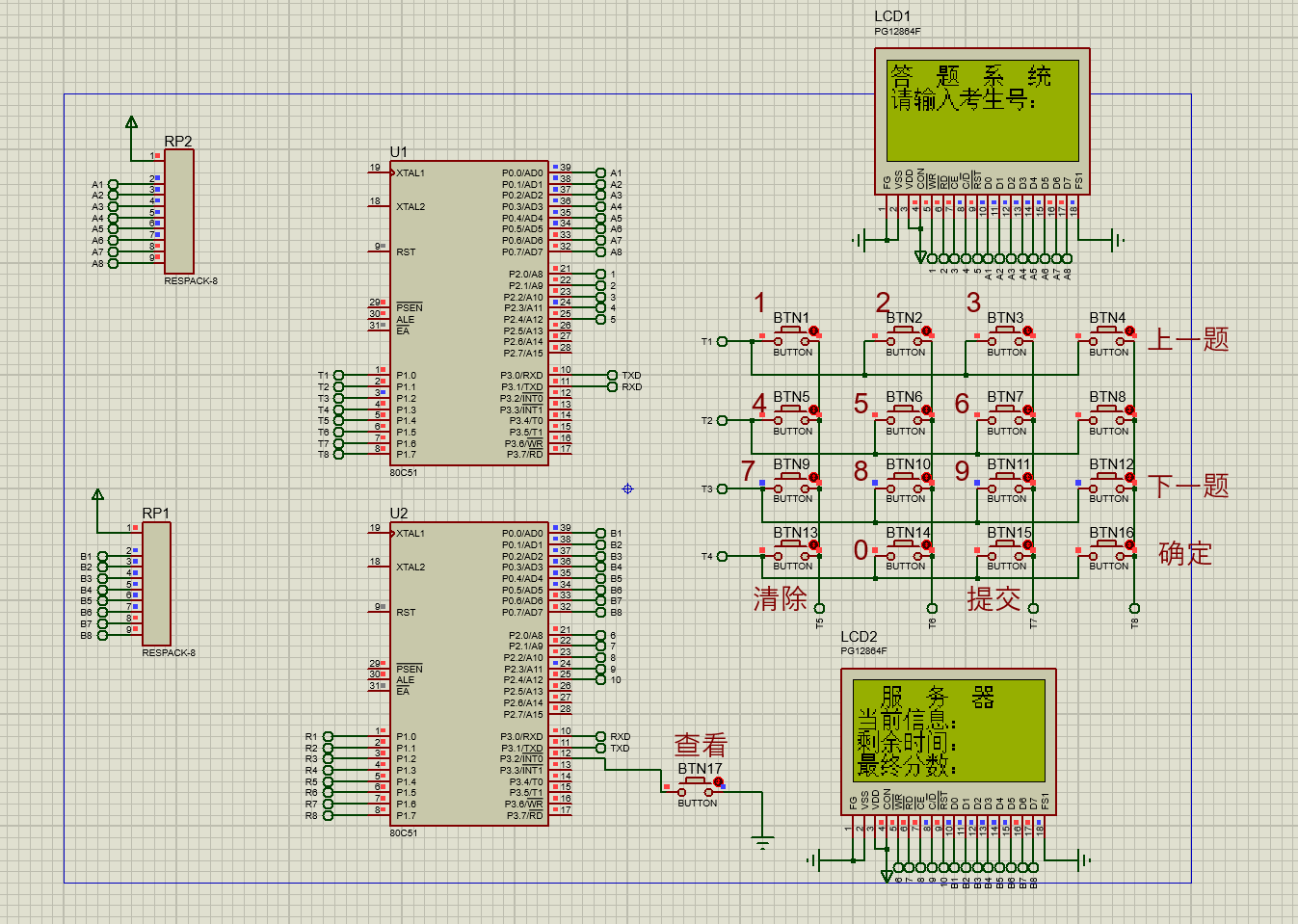
1)两个单片机系统分别作为服务器和答题终端。服务器负责验正考生个人信息,发送试愿到降端,定时收卷及判分功能。答题终端负责输入考生个人信息,答题,修改答案及传送答案到服务器。
2)服务器验证考生个人信息,若信息不正确则向终端发出提示信息。信息验证正确后将试题发送到答题终端,同时开始计时。无论答题是否完成。考试时间到则强制收题。也可在考试时同尚有剩余时接收答题终端发送过来的答案。收题后进行判分工作并给出最终得分及答题情况统计信息。对回答错误的题日则给出原题及正确答案。
3)答题终端在收到试题后向考生显示试题内容(可逐道显示)并接受考生输入的答案。试题显示应具备翻页功能以允许考生反复浏览试题或检查所作答案。当考生检查完毕且考试时间尚有剩余,允许考生向服务器发送最终答案。
4)实现服务器和答题终端的两个单片机系统均应包含键盘和LCD液品显示模块。两个单片机系统通过串口进行通信。
*************************************************
(1)给出使用说明,包括按键的定义,操作方法等。
(2)所有功能用途均可实现且各功能转换正常(模拟5道题即可)。
(3)考生个人信息包括考生姓名(可用拼音表示)和6位的学号。
(4)验收时需要演示考生个人信息不正确时的处理情况:
(5)服务器和终端都应实时显示考试剩余时间:
(6)四则运算应覆盖加减乘除四种运算:
(7)终端答题时,在未提交答案前应允许反复浏览或修改答案
服务端
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
#define uchar unsigned char
#define uint unsigned int
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit wr=P2^0; //数据写
sbit rd=P2^1; //数据读
sbit ce=P2^2; //片选
sbit cd=P2^3; //指令数据通道,1指令,0数据
sbit rst=P2^4; //复位信号
sbit key = P3^2;
uchar S_datt[2][6]={{1,2,3,4,5,6},{1,1,1,1,1,1}};
uchar Title[10] = {5,1,3,2,1,5,6,3,1,1};
uchar Answer[5] = {6,1,5,2,2};
uchar R_mode;
uchar R_wei;
uchar R_buff[20];
uint dis_tim;
uint ALL_time=30;
uchar flag_mode;
uchar C_T[6];
uchar bl;
uchar code HZ0[][32]={
{0x00,0x00,0x3E,0xFC,0x22,0x84,0x22,0x84,0x22,0x94,0x3E,0x88,0x22,0x80,0x22,0xFC,
0x22,0xA4,0x3E,0xA4,0x22,0xA8,0x22,0xA8,0x22,0x90,0x42,0xA8,0x4A,0xC4,0x84,0x82},/*"服",0*/
{0x04,0x00,0x04,0x00,0x0F,0xF0,0x18,0x20,0x24,0xC0,0x03,0x00,0x0C,0xC0,0x32,0x30,
0xC2,0x0E,0x1F,0xF0,0x02,0x10,0x04,0x10,0x04,0x10,0x08,0x10,0x10,0xA0,0x20,0x40},/*"务",1*/
{0x00,0x00,0x3E,0x7C,0x22,0x44,0x22,0x44,0x3E,0x7C,0x01,0x20,0x01,0x10,0xFF,0xFE,
0x02,0x80,0x0C,0x60,0x30,0x18,0xC0,0x06,0x3E,0x7C,0x22,0x44,0x22,0x44,0x3E,0x7C},/*"器",2*/
{0x01,0x00,0x21,0x08,0x11,0x08,0x09,0x10,0x09,0x20,0x01,0x00,0x7F,0xF8,0x00,0x08,
0x00,0x08,0x00,0x08,0x3F,0xF8,0x00,0x08,0x00,0x08,0x00,0x08,0x7F,0xF8,0x00,0x08},/*"当",3*/
{0x10,0x10,0x08,0x10,0x08,0x20,0xFF,0xFE,0x00,0x00,0x3E,0x08,0x22,0x48,0x22,0x48,
0x3E,0x48,0x22,0x48,0x22,0x48,0x3E,0x48,0x22,0x08,0x22,0x08,0x2A,0x28,0x24,0x10},/*"前",4*/
{0x08,0x40,0x08,0x20,0x0B,0xFE,0x10,0x00,0x10,0x00,0x31,0xFC,0x30,0x00,0x50,0x00,
0x91,0xFC,0x10,0x00,0x10,0x00,0x11,0xFC,0x11,0x04,0x11,0x04,0x11,0xFC,0x11,0x04},/*"信",5*/
{0x01,0x00,0x02,0x00,0x1F,0xF0,0x10,0x10,0x1F,0xF0,0x10,0x10,0x1F,0xF0,0x10,0x10,
0x1F,0xF0,0x10,0x10,0x01,0x00,0x08,0x84,0x48,0x92,0x48,0x12,0x87,0xF0,0x00,0x00},/*"息",6*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x30,0x00,0x30,0x00,0x00,0x00,0x30,0x00,0x30,0x00,0x00,0x00,0x00,0x00},/*":",7*/
{0x07,0x02,0x78,0x02,0x08,0x02,0xFF,0x82,0x2A,0x12,0x2A,0x92,0xEB,0x12,0x2A,0x92,
0x6A,0x92,0xA9,0x92,0x1C,0x12,0x2A,0x12,0x49,0x02,0x88,0x82,0x08,0x0A,0x08,0x04},/*"剩",8*/
{0x01,0x00,0x01,0x00,0x02,0x80,0x04,0x40,0x08,0x20,0x10,0x10,0x2F,0xE8,0xC1,0x06,
0x01,0x00,0x3F,0xF8,0x01,0x00,0x11,0x10,0x11,0x08,0x21,0x04,0x45,0x04,0x02,0x00},/*"余",9*/
{0x00,0x08,0x00,0x08,0x7C,0x08,0x44,0x08,0x45,0xFE,0x44,0x08,0x44,0x08,0x7C,0x08,
0x44,0x88,0x44,0x48,0x44,0x48,0x44,0x08,0x7C,0x08,0x44,0x08,0x00,0x28,0x00,0x10},/*"时",10*/
{0x20,0x00,0x13,0xFC,0x10,0x04,0x40,0x04,0x47,0xC4,0x44,0x44,0x44,0x44,0x44,0x44,
0x47,0xC4,0x44,0x44,0x44,0x44,0x44,0x44,0x47,0xC4,0x40,0x04,0x40,0x14,0x40,0x08},/*"间",11*/
{0x1F,0xF0,0x10,0x10,0x1F,0xF0,0x10,0x10,0x1F,0xF0,0x00,0x00,0xFF,0xFE,0x22,0x00,
0x3E,0xF8,0x22,0x88,0x3E,0x90,0x22,0x50,0x2F,0x20,0xF2,0x50,0x42,0x88,0x03,0x06},/*"最",12*/
{0x10,0x80,0x10,0x80,0x20,0xF8,0x21,0x08,0x4B,0x10,0xFC,0xA0,0x10,0x40,0x20,0xA0,
0x43,0x18,0xFC,0x06,0x40,0xC0,0x00,0x20,0x18,0x10,0xE1,0x80,0x40,0x60,0x00,0x10},/*"终",13*/
{0x00,0x40,0x04,0x40,0x04,0x20,0x08,0x20,0x10,0x10,0x20,0x08,0x40,0x04,0x9F,0xE2,
0x04,0x20,0x04,0x20,0x04,0x20,0x08,0x20,0x08,0x20,0x10,0x20,0x21,0x40,0x40,0x80},/*"分",14*/
{0x08,0x20,0x49,0x20,0x2A,0x20,0x08,0x3E,0xFF,0x44,0x2A,0x44,0x49,0x44,0x88,0xA4,
0x10,0x28,0xFE,0x28,0x22,0x10,0x42,0x10,0x64,0x28,0x18,0x28,0x34,0x44,0xC2,0x82},/*"数",15*/
{0x00,0x00,0x7F,0xFC,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x11,0x00,0x11,0xF8,
0x11,0x00,0x11,0x00,0x11,0x00,0x11,0x00,0x11,0x00,0x11,0x00,0xFF,0xFE,0x00,0x00},/*"正",16*/
{0x00,0x40,0x00,0x40,0xFC,0x7C,0x10,0x84,0x11,0x08,0x22,0xFE,0x3C,0x92,0x64,0x92,
0x64,0xFE,0xA4,0x92,0x24,0x92,0x24,0xFE,0x3C,0x92,0x25,0x12,0x21,0x0A,0x02,0x04},/*"确",17*/
{0x21,0x10,0x21,0x10,0x39,0x10,0x27,0xFC,0x41,0x10,0x79,0x10,0xAF,0xFE,0x20,0x00,
0xFB,0xF8,0x22,0x08,0x22,0x08,0x23,0xF8,0x2A,0x08,0x32,0x08,0x23,0xF8,0x02,0x08},/*"错",18*/
{0x00,0x00,0x43,0xF8,0x22,0x08,0x22,0x08,0x03,0xF8,0x00,0x00,0xE0,0x00,0x27,0xFC,
0x20,0x40,0x20,0x40,0x2F,0xFE,0x20,0x40,0x28,0xA0,0x31,0x10,0x22,0x08,0x0C,0x06},/*"误",19*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,/*" ",20*/
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
};
uchar code SZ[][16]={
{0x00,0x00,0x00,0x18,0x24,0x42,0x42,0x42,0x42,0x42,0x42,0x42,0x24,0x18,0x00,0x00},/*"0",0*/
{0x00,0x00,0x00,0x08,0x38,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x3E,0x00,0x00},/*"1",1*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x02,0x04,0x08,0x10,0x20,0x42,0x7E,0x00,0x00},/*"2",2*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x02,0x04,0x18,0x04,0x02,0x42,0x42,0x3C,0x00,0x00},/*"3",3*/
{0x00,0x00,0x00,0x04,0x0C,0x0C,0x14,0x24,0x24,0x44,0x7F,0x04,0x04,0x1F,0x00,0x00},/*"4",4*/
{0x00,0x00,0x00,0x7E,0x40,0x40,0x40,0x78,0x44,0x02,0x02,0x42,0x44,0x38,0x00,0x00},/*"5",5*/
{0x00,0x00,0x00,0x18,0x24,0x40,0x40,0x5C,0x62,0x42,0x42,0x42,0x22,0x1C,0x00,0x00},/*"6",6*/
{0x00,0x00,0x00,0x7E,0x42,0x04,0x04,0x08,0x08,0x10,0x10,0x10,0x10,0x10,0x00,0x00},/*"7",7*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x24,0x18,0x24,0x42,0x42,0x42,0x3C,0x00,0x00},/*"8",8*/
{0x00,0x00,0x00,0x38,0x44,0x42,0x42,0x42,0x46,0x3A,0x02,0x02,0x24,0x18,0x00,0x00},/*"9",9*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",10*/
{0x00,0x00,0x00,0x00,0x00,0x08,0x08,0x08,0x7F,0x08,0x08,0x08,0x00,0x00,0x00,0x00},/*"+",11*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x7E,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"-",12*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x76,0x24,0x18,0x18,0x18,0x24,0x6E,0x00,0x00},/*"x",13*/
{0x00,0x00,0x02,0x04,0x04,0x04,0x08,0x08,0x10,0x10,0x10,0x20,0x20,0x40,0x40,0x00},/*"/",14*/
{0x00,0x00,0x00,0x00,0x00,0x08,0x08,0x08,0x7F,0x08,0x08,0x08,0x00,0x00,0x00,0x00},/*"=",15*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x7E,0x00,0x00,0x7E,0x00,0x00,0x00,0x00,0x00,0x00},/*"=",16*/
};
void delay(uint t) //延时函数
{
uint i,j;
for(i=0;i< 1;i++);
}
void Delay_xms(uint x)
{
uint i,j;
for(i=0;i< x;i++)
for(j=0;j< 112;j++);
}
uchar read_status() //读取lcd12864的状态
{
uchar status;
P0=0;//端口b置为输入
rd=0;
wr=1;
ce=0;
cd=1;
status=P1;
return status;
}
void check_status()//检查lcd12864的状态
{
uchar s;
P0=0Xff;//端口b置为输出
while((s&0x80)!=0x80)
s=read_status();//等待位1,2置为。命令读写准备好。数据读写准备好
}
void write_data(uchar dat)//写数据
{
rd=1;
cd=0;
ce=0;
wr=0;
P0=dat;
delay(1);
wr=1;
ce=1;
cd=1;
}
void write_cmd1(uchar cmd)//写数据1
{
rd=1;
cd=1;
ce=0;
wr=0;
P0=cmd;
delay(1);
wr=1;
ce=1;
cd=0;
}
//先送参数,再送指令
void write_cmd2(uchar dat,uchar cmd)
{
check_status();
write_data(dat);
check_status();
write_cmd1(cmd);
}
void write_cmd3(uchar data1,uchar data2,uchar cmd)//发送参数并发指令再发送数据
{
check_status();
write_data(data1);
check_status();
write_data(data2);
check_status();
write_cmd1(cmd);
}
void init()//LCD12864的初始化
{
P2=0Xff;
P1=0Xff;
rst=1;
delay(10);
rst=0;
wr=1;
rd=1;
ce=1;
cd=1;
rst=1;
check_status();
write_cmd3(0x01,0x00,0x21);//光标指针设置
check_status();
write_cmd3(0x00,0x00,0x42);//图形区首地址
check_status();
write_cmd3(16,0x00,0x43);//图形区宽度
check_status();
write_cmd1(0x80);//显示方式设置,正常显示
check_status();
write_cmd1(0x98);//图形方式显示,不显示字母,只打点
check_status();
write_cmd1(0xa0);//光标形状设置1 0 1 0 0 N2 N1 N0
}
//汉字显示函数,处在x y处显示汉字
void display_HZ(uchar x,uchar y,uchar *hz)////x 0-3 y 0-7
{
uchar i,j=0;
for(i=0;i< 16;i++)
{
write_cmd3(((j/2)< <4)|(y*2),x,0x24);//地址指针设置..低地址,高地址,命令
write_cmd2(hz[j++],0xc0);
write_cmd2(hz[j++],0xc0);
}
}
void display_SZ(uchar x,uchar y,uchar *hz)////x 0-3 y 0-14
{
uchar i,j=0;
for(i=0;i< 16;i++)
{
write_cmd3(((j)< <4)|y,x,0x24);//地址指针设置..低地址,高地址,命令
write_cmd2(hz[j++],0xc0);
}
}
void Uart1Send(uchar c)
{
SBUF=c;
while(!TI);
TI=0;
}
void Uart1Sends(uchar *str)
{
while(*str!='�')
{
SBUF=*str;
while(!TI);
TI=0;
str++;
}
}
void UsartInit()
{
TMOD=0x21;
TH1=0xfd;
TL1=0xfd;
TR1=1;
SM0=0;
SM1=1;
REN=1;
EA=1;
ES=1;
TH0=0XFC; //给定时器赋初值,定时1ms TH1
TL0=0X18; //TL1
ET0=1; //定时器0中断打开 ET1
TR0=1; //定时器0开关打开 TR1
}
void CLear_N(uchar num)
{
uchar i;
for(i=0;i< 7;i++)
{
display_HZ(num,i,HZ0[20]);
}
}
void main()
{
UsartInit(); // 串口初始化
init();
Delay_xms(10);
display_HZ(0,1,HZ0[0]);
display_HZ(0,3,HZ0[1]);
display_HZ(0,5,HZ0[2]);
display_HZ(1,0,HZ0[3]);
display_HZ(1,1,HZ0[4]);
display_HZ(1,2,HZ0[5]);
display_HZ(1,3,HZ0[6]);
display_HZ(1,4,HZ0[7]);
display_HZ(2,0,HZ0[8]);
display_HZ(2,1,HZ0[9]);
display_HZ(2,2,HZ0[10]);
display_HZ(2,3,HZ0[11]);
display_HZ(2,4,HZ0[7]);
display_HZ(3,0,HZ0[12]);
display_HZ(3,1,HZ0[13]);
display_HZ(3,2,HZ0[14]);
display_HZ(3,3,HZ0[15]);
display_HZ(3,4,HZ0[7]);
while(1)
{
if(key == 0)
{
Delay_xms(10);
if(key == 0)
{
while(key==0);
if(flag_mode == 3)
{
CLear_N(0);
CLear_N(1);
CLear_N(2);
CLear_N(3);
for(bl=0;bl< C_T[0];bl++)
{
display_SZ(bl,0,SZ[Title[(C_T[bl+1]-1)*2]]);
display_SZ(bl,1,SZ[C_T[bl+1]+10]);
display_SZ(bl,2,SZ[Title[(C_T[bl+1]-1)*2+1]]);
display_SZ(bl,3,SZ[16]);
display_SZ(bl,10,SZ[C_T[bl+1]]);
display_SZ(bl,4,SZ[Answer[C_T[bl+1]-1]]);
}
}
}
}
}
}
void Send_Title()
{
uchar i;
Uart1Send('T');
for(i=0;i< 10;i++)
{
Uart1Send(Title[i]);
}
}
void Usart_rec() interrupt 4
{
unsigned char datt;
if(RI == 1)
{
RI=0;
datt=SBUF;//出去接收到的数据
if(R_mode==1)
{
R_buff[R_wei] = datt;
R_wei++;
if(R_wei == 7)
{
if(R_buff[0] == 1)
{
if(R_buff[1] == 1 && R_buff[2] == 2 && R_buff[3] == 3 && R_buff[4] == 4 && R_buff[5] == 5 && R_buff[6] == 6 )
{
Uart1Send('D');
display_HZ(1,5,HZ0[16]);
display_HZ(1,6,HZ0[17]);
Send_Title();
flag_mode = 2;
}else
{
Uart1Send('X');
display_HZ(1,5,HZ0[18]);
display_HZ(1,6,HZ0[19]);
}
}else if(R_buff[0] == 2)
{
if(R_buff[1] == 1 && R_buff[2] == 1 && R_buff[3] == 1 && R_buff[4] == 1 && R_buff[5] == 1 && R_buff[6] == 1 )
{
Uart1Send('D');
display_HZ(1,5,HZ0[16]);
display_HZ(1,6,HZ0[17]);
Send_Title();
flag_mode = 2;
}else
{
Uart1Send('X');
display_HZ(1,5,HZ0[18]);
display_HZ(1,6,HZ0[19]);
}
}
R_wei = 0;
R_mode = 0;
}
}else if(R_mode == 2)
{
R_buff[R_wei] = datt;
R_wei++;
if(R_wei == 5)
{
if(R_buff[0] != Answer[0])
{
C_T[0] ++;
C_T[C_T[0]] = 1;
}
if(R_buff[1] != Answer[1])
{
C_T[0] ++;
C_T[C_T[0]] = 2;
}
if(R_buff[2] != Answer[2])
{
C_T[0] ++;
C_T[C_T[0]] = 3;
}
if(R_buff[3] != Answer[3])
{
C_T[0] ++;
C_T[C_T[0]] = 4;
}
if(R_buff[4] != Answer[4])
{
C_T[0] ++;
C_T[C_T[0]] = 5;
}
display_SZ(3,10,SZ[5-C_T[0]]);
R_wei = 0;
R_mode = 0;
}
}
if(datt == 'x')
{
R_mode = 1;
R_wei = 0;
}else if(datt == 'W')
{
R_mode = 2;
R_wei = 0;
flag_mode = 3;
}
}
}
void Timer0() interrupt 1 //参考上图 定时器1时为3
{
TH0=0XFC; //给定时器赋初值,定时1ms TH1
TL0=0X18; //TL1
dis_tim++;
if(dis_tim==1000)
{
dis_tim=0;
if(flag_mode == 2)
{
if(ALL_time!=0)
{
ALL_time -- ;
}
display_SZ(2,10,SZ[ALL_time/10]);
display_SZ(2,11,SZ[ALL_time%10]);
}
}
}
答题端:
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
#define uchar unsigned char
#define uint unsigned int
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
u8 data_send;
sbit wr=P2^0; //数据写
sbit rd=P2^1; //数据读
sbit ce=P2^2; //片选
sbit cd=P2^3; //指令数据通道,1指令,0数据
sbit rst=P2^4; //复位信号
sbit h1 = P1^0;
sbit h2 = P1^1;
sbit h3 = P1^2;
sbit h4 = P1^3;
sbit l1 = P1^4;
sbit l2 = P1^5;
sbit l3 = P1^6;
sbit l4 = P1^7;
uchar flag_mode;//当前输入模式 0为考生号 1为学号
uchar S_num; //考生号
uchar S_buff[6]; //学号
uchar S_wei;
uchar R_mode;
uchar R_wei;
uchar R_buff[20];
uchar Tit[10];
uchar Tit_Now;
uchar Answer[5];
uint dis_tim;
uint ALL_time=30;
uchar code HZ0[][32]={
{0x10,0x40,0x10,0x40,0x3F,0x7E,0x28,0x90,0x45,0x08,0x82,0x80,0x0C,0x60,0x30,0x18,
0xCF,0xE6,0x00,0x00,0x1F,0xF0,0x10,0x10,0x10,0x10,0x10,0x10,0x1F,0xF0,0x10,0x10},/*"答",0*/
{0x00,0x00,0x3E,0xFE,0x22,0x10,0x3E,0x20,0x22,0x7C,0x3E,0x44,0x00,0x54,0xFF,0x54,
0x08,0x54,0x08,0x54,0x2F,0x28,0x28,0x44,0x28,0x82,0x58,0x00,0x4F,0xFE,0x80,0x00},/*"题",1*/
{0x00,0xF8,0x3F,0x00,0x04,0x00,0x08,0x20,0x10,0x40,0x3F,0x80,0x01,0x00,0x06,0x10,
0x18,0x08,0x7F,0xFC,0x01,0x04,0x09,0x20,0x11,0x10,0x21,0x08,0x45,0x04,0x02,0x00},/*"系",2*/
{0x10,0x40,0x10,0x20,0x20,0x20,0x23,0xFE,0x48,0x40,0xF8,0x88,0x11,0x04,0x23,0xFE,
0x40,0x92,0xF8,0x90,0x40,0x90,0x00,0x90,0x19,0x12,0xE1,0x12,0x42,0x0E,0x04,0x00},/*"统",3*/
{0x00,0x40,0x40,0x40,0x27,0xFC,0x20,0x40,0x03,0xF8,0x00,0x40,0xE7,0xFE,0x20,0x00,
0x23,0xF8,0x22,0x08,0x23,0xF8,0x22,0x08,0x2B,0xF8,0x32,0x08,0x22,0x28,0x02,0x10},/*"请",4*/
{0x20,0x40,0x20,0xA0,0x21,0x10,0xFA,0x08,0x25,0xF6,0x40,0x00,0x53,0xC4,0x92,0x54,
0xFA,0x54,0x13,0xD4,0x1A,0x54,0xF2,0x54,0x53,0xD4,0x12,0x44,0x12,0x54,0x12,0xC8},/*"输",5*/
{0x04,0x00,0x02,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x02,0x80,0x02,0x80,0x02,0x80,
0x04,0x40,0x04,0x40,0x08,0x20,0x08,0x20,0x10,0x10,0x20,0x10,0x40,0x08,0x80,0x06},/*"入",6*/
{0x02,0x00,0x02,0x08,0x3F,0xD0,0x02,0x20,0x02,0x40,0xFF,0xFE,0x01,0x00,0x02,0x00,
0x0F,0xF8,0x12,0x00,0x24,0x00,0x47,0xF0,0x80,0x10,0x00,0x10,0x00,0xA0,0x00,0x40},/*"考",7*/
{0x01,0x00,0x11,0x00,0x11,0x00,0x11,0x00,0x3F,0xFC,0x21,0x00,0x41,0x00,0x81,0x00,
0x01,0x00,0x3F,0xF8,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0xFF,0xFE,0x00,0x00},/*"生",8*/
{0x00,0x00,0x1F,0xF0,0x10,0x10,0x10,0x10,0x10,0x10,0x1F,0xF0,0x00,0x00,0xFF,0xFE,
0x08,0x00,0x10,0x00,0x1F,0xF0,0x00,0x10,0x00,0x10,0x00,0x10,0x00,0xA0,0x00,0x40},/*"号",9*/
{0x00,0x40,0x40,0x40,0x27,0xFC,0x20,0x40,0x03,0xF8,0x00,0x40,0xE7,0xFE,0x20,0x00,
0x23,0xF8,0x22,0x08,0x23,0xF8,0x22,0x08,0x2B,0xF8,0x32,0x08,0x22,0x28,0x02,0x10},/*"请",10*/
{0x20,0x40,0x20,0xA0,0x21,0x10,0xFA,0x08,0x25,0xF6,0x40,0x00,0x53,0xC4,0x92,0x54,
0xFA,0x54,0x13,0xD4,0x1A,0x54,0xF2,0x54,0x53,0xD4,0x12,0x44,0x12,0x54,0x12,0xC8},/*"输",11*/
{0x04,0x00,0x02,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x02,0x80,0x02,0x80,0x02,0x80,
0x04,0x40,0x04,0x40,0x08,0x20,0x08,0x20,0x10,0x10,0x20,0x10,0x40,0x08,0x80,0x06},/*"入",12*/
{0x22,0x08,0x11,0x08,0x11,0x10,0x00,0x20,0x7F,0xFE,0x40,0x02,0x80,0x04,0x1F,0xE0,
0x00,0x40,0x01,0x80,0xFF,0xFE,0x01,0x00,0x01,0x00,0x01,0x00,0x05,0x00,0x02,0x00},/*"学",13*/
{0x00,0x00,0x1F,0xF0,0x10,0x10,0x10,0x10,0x10,0x10,0x1F,0xF0,0x00,0x00,0xFF,0xFE,
0x08,0x00,0x10,0x00,0x1F,0xF0,0x00,0x10,0x00,0x10,0x00,0x10,0x00,0xA0,0x00,0x40},/*"号",14*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x30,0x00,0x30,0x00,0x00,0x00,0x30,0x00,0x30,0x00,0x00,0x00,0x00,0x00},/*":",15*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,/*" ",16*/
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x7F,0xFC,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x11,0x00,0x11,0xF8,
0x11,0x00,0x11,0x00,0x11,0x00,0x11,0x00,0x11,0x00,0x11,0x00,0xFF,0xFE,0x00,0x00},/*"正",17*/
{0x00,0x40,0x00,0x40,0xFC,0x7C,0x10,0x84,0x11,0x08,0x22,0xFE,0x3C,0x92,0x64,0x92,
0x64,0xFE,0xA4,0x92,0x24,0x92,0x24,0xFE,0x3C,0x92,0x25,0x12,0x21,0x0A,0x02,0x04},/*"确",18*/
{0x21,0x10,0x21,0x10,0x39,0x10,0x27,0xFC,0x41,0x10,0x79,0x10,0xAF,0xFE,0x20,0x00,
0xFB,0xF8,0x22,0x08,0x22,0x08,0x23,0xF8,0x2A,0x08,0x32,0x08,0x23,0xF8,0x02,0x08},/*"错",19*/
{0x00,0x00,0x43,0xF8,0x22,0x08,0x22,0x08,0x03,0xF8,0x00,0x00,0xE0,0x00,0x27,0xFC,
0x20,0x40,0x20,0x40,0x2F,0xFE,0x20,0x40,0x28,0xA0,0x31,0x10,0x22,0x08,0x0C,0x06},/*"误",20*/
};
uchar code SZ[][16]={
{0x00,0x00,0x00,0x18,0x24,0x42,0x42,0x42,0x42,0x42,0x42,0x42,0x24,0x18,0x00,0x00},/*"0",0*/
{0x00,0x00,0x00,0x08,0x38,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x3E,0x00,0x00},/*"1",1*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x02,0x04,0x08,0x10,0x20,0x42,0x7E,0x00,0x00},/*"2",2*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x02,0x04,0x18,0x04,0x02,0x42,0x42,0x3C,0x00,0x00},/*"3",3*/
{0x00,0x00,0x00,0x04,0x0C,0x0C,0x14,0x24,0x24,0x44,0x7F,0x04,0x04,0x1F,0x00,0x00},/*"4",4*/
{0x00,0x00,0x00,0x7E,0x40,0x40,0x40,0x78,0x44,0x02,0x02,0x42,0x44,0x38,0x00,0x00},/*"5",5*/
{0x00,0x00,0x00,0x18,0x24,0x40,0x40,0x5C,0x62,0x42,0x42,0x42,0x22,0x1C,0x00,0x00},/*"6",6*/
{0x00,0x00,0x00,0x7E,0x42,0x04,0x04,0x08,0x08,0x10,0x10,0x10,0x10,0x10,0x00,0x00},/*"7",7*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x24,0x18,0x24,0x42,0x42,0x42,0x3C,0x00,0x00},/*"8",8*/
{0x00,0x00,0x00,0x38,0x44,0x42,0x42,0x42,0x46,0x3A,0x02,0x02,0x24,0x18,0x00,0x00},/*"9",9*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",10*/
{0x00,0x00,0x00,0x00,0x00,0x08,0x08,0x08,0x7F,0x08,0x08,0x08,0x00,0x00,0x00,0x00},/*"+",11*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x7E,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"-",12*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x76,0x24,0x18,0x18,0x18,0x24,0x6E,0x00,0x00},/*"x",13*/
{0x00,0x00,0x02,0x04,0x04,0x04,0x08,0x08,0x10,0x10,0x10,0x20,0x20,0x40,0x40,0x00},/*"/",14*/
{0x00,0x00,0x00,0x00,0x00,0x08,0x08,0x08,0x7F,0x08,0x08,0x08,0x00,0x00,0x00,0x00},/*"=",15*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x7E,0x00,0x00,0x7E,0x00,0x00,0x00,0x00,0x00,0x00},/*"=",16*/
};
void delay(uint t) //延时函数
{
uint i,j;
for(i=0;i< 1;i++);
}
void Delay_xms(uint x)
{
uint i,j;
for(i=0;i< x;i++)
for(j=0;j< 112;j++);
}
uchar read_status() //读取lcd12864的状态
{
uchar status;
P0=0;//端口b置为输入
rd=0;
wr=1;
ce=0;
cd=1;
status=P1;
return status;
}
void check_status()//检查lcd12864的状态
{
uchar s;
P0=0Xff;//端口b置为输出
while((s&0x80)!=0x80)
s=read_status();//等待位1,2置为。命令读写准备好。数据读写准备好
}
void write_data(uchar dat)//写数据
{
rd=1;
cd=0;
ce=0;
wr=0;
P0=dat;
delay(1);
wr=1;
ce=1;
cd=1;
}
void write_cmd1(uchar cmd)//写数据1
{
rd=1;
cd=1;
ce=0;
wr=0;
P0=cmd;
delay(1);
wr=1;
ce=1;
cd=0;
}
//先送参数,再送指令
void write_cmd2(uchar dat,uchar cmd)
{
check_status();
write_data(dat);
check_status();
write_cmd1(cmd);
}
void write_cmd3(uchar data1,uchar data2,uchar cmd)//发送参数并发指令再发送数据
{
check_status();
write_data(data1);
check_status();
write_data(data2);
check_status();
write_cmd1(cmd);
}
void init()//LCD12864的初始化
{
P2=0Xff;
P1=0Xff;
rst=1;
delay(10);
rst=0;
wr=1;
rd=1;
ce=1;
cd=1;
rst=1;
check_status();
write_cmd3(0x01,0x00,0x21);//光标指针设置
check_status();
write_cmd3(0x00,0x00,0x42);//图形区首地址
check_status();
write_cmd3(16,0x00,0x43);//图形区宽度
check_status();
write_cmd1(0x80);//显示方式设置,正常显示
check_status();
write_cmd1(0x98);//图形方式显示,不显示字母,只打点
check_status();
write_cmd1(0xa0);//光标形状设置1 0 1 0 0 N2 N1 N0
}
//汉字显示函数,处在x y处显示汉字
void display_HZ(uchar x,uchar y,uchar *hz)////x 0-3 y 0-7
{
uchar i,j=0;
for(i=0;i< 16;i++)
{
write_cmd3(((j/2)< <4)|(y*2),x,0x24);//地址指针设置..低地址,高地址,命令
write_cmd2(hz[j++],0xc0);
write_cmd2(hz[j++],0xc0);
}
}
void display_SZ(uchar x,uchar y,uchar *hz)////x 0-3 y 0-14
{
uchar i,j=0;
for(i=0;i< 16;i++)
{
write_cmd3(((j)< <4)|y,x,0x24);//地址指针设置..低地址,高地址,命令
write_cmd2(hz[j++],0xc0);
}
}
void Uart1Send(uchar c)
{
SBUF=c;
while(!TI);
TI=0;
}
void Uart1Sends(uchar *str)
{
while(*str!='�')
{
SBUF=*str;
while(!TI);
TI=0;
str++;
}
}
void UsartInit()
{
TMOD=0x21;
TH1=0xfd;
TL1=0xfd;
TR1=1;
SM0=0;
SM1=1;
REN=1;
EA=1;
ES=1;
TH0=0XFC; //给定时器赋初值,定时1ms TH1
TL0=0X18; //TL1
ET0=1; //定时器0中断打开 ET1
TR0=1; //定时器0开关打开 TR1
}
void CLear_N(uchar num)
{
uchar i;
for(i=0;i< 15;i++)
{
display_HZ(num,i,SZ[10]);
}
}
void SEND_X()
{
uchar datt[8];
datt[0] = 'x';
datt[1] = S_num;
datt[2] = S_buff[0];
datt[3] = S_buff[1];
datt[4] = S_buff[2];
datt[5] = S_buff[3];
datt[6] = S_buff[4];
datt[7] = S_buff[5];
Uart1Sends(datt);
}
void SEND_A()
{
uchar datt[6];
uchar dd;
datt[0] = 'W';
datt[1] = Answer[0];
datt[2] = Answer[1];
datt[3] = Answer[2];
datt[4] = Answer[3];
datt[5] = Answer[4];
for(dd=0;dd< 6;dd++)
{
Uart1Send(datt[dd]);
Delay_xms(20);
}
}
void key_scan()
{
h1=1;
h2=1;
h3=1;
h4=1;
l1=1;
l2=1;
l3=1;
l4=1;
h1=0;
if(l1==0 && h1==0 && h2==1 && l2==1 && l3==1 && l4==1 ) //1
{
while(l1==0);
if(flag_mode == 0)
{
S_num = 1;
display_SZ(2,6,SZ[S_num]);
}else if(flag_mode == 1)
{
S_buff[S_wei] = 1;
display_SZ(2,S_wei,SZ[1]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 1;
display_SZ(3,4,SZ[1]);
}
}else if(l1==1 && h1==0 && h2==1 && l2==0 && l3==1 && l4==1 ) //2
{
while(l2==0);
if(flag_mode == 0)
{
S_num = 2;
display_SZ(2,6,SZ[S_num]);
}else if(flag_mode == 1)
{
S_buff[S_wei] = 2;
display_SZ(2,S_wei,SZ[2]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 2;
display_SZ(3,4,SZ[2]);
}
}else if(l1==1 && h1==0 && h2==1 && l2==1 && l3==0 && l4==1)//3
{
while(l3==0);
if(flag_mode == 0)
{
S_num = 3;
display_SZ(2,6,SZ[S_num]);
}else if(flag_mode == 1)
{
S_buff[S_wei] = 3;
display_SZ(2,S_wei,SZ[3]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 3;
display_SZ(3,4,SZ[3]);
}
}else if(l1==1 && h1==0 && h2==1 && l2==1 && l3==1 && l4==0)//4
{
while(l4==0);
if(flag_mode == 2)
{
if(Tit_Now >1)
{
Tit_Now--;
display_SZ(3,0,SZ[Tit[(Tit_Now-1)*2]]);
display_SZ(3,1,SZ[Tit_Now+10]);
display_SZ(3,2,SZ[Tit[(Tit_Now-1)*2+1]]);
display_SZ(3,3,SZ[16]);
display_SZ(3,10,SZ[Tit_Now]);
display_SZ(3,4,SZ[Answer[Tit_Now-1]]);
}
}
}
else
{
h1=1;
h2=0;
if(l1==0 && h1==1 && h2==0 && l2==1 && l3==1 && l4==1 )//6
{
while(l1==0);
if(flag_mode == 0)
{
S_num = 4;
display_SZ(2,6,SZ[S_num]);
}else if(flag_mode == 1)
{
S_buff[S_wei] = 4;
display_SZ(2,S_wei,SZ[4]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 4;
display_SZ(3,4,SZ[4]);
}
}else if(l1==1 && h1==1 && h2==0 && l2==0 && l3==1 && l4==1 )//7
{
while(l2==0);
if(flag_mode == 1)
{
S_buff[S_wei] = 5;
display_SZ(2,S_wei,SZ[5]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 5;
display_SZ(3,4,SZ[5]);
}
}else if(l1==1 && h1==1 && h2==0 && l2==1 && l3==0 && l4==1)//8
{
while(l3==0);
if(flag_mode == 1)
{
S_buff[S_wei] = 6;
display_SZ(2,S_wei,SZ[6]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 6;
display_SZ(3,4,SZ[6]);
}
}else if(l1==1 && h1==1 && h2==0 && l2==1 && l3==1 && l4==0)//9
{
while(l4==0);
}else
{
h1=1;
h2=1;
h3=0;
if(l1==0 && h1==1 && h2==1 && h3==0 && l2==1 && l3==1 && l4==1)//11
{
while(l1==0);
if(flag_mode == 1)
{
S_buff[S_wei] = 7;
display_SZ(2,S_wei,SZ[7]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 7;
display_SZ(3,4,SZ[7]);
}
}else if(l1==1 && h1==1 && h2==1 && h3==0 && l2==0 && l3==1 && l4==1)//12
{
while(l2==0);
if(flag_mode == 1)
{
S_buff[S_wei] = 8;
display_SZ(2,S_wei,SZ[8]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 8;
display_SZ(3,4,SZ[8]);
}
}else if(l1==1 && h1==1 && h2==1 && h3==0 && l2==1 && l3==0 && l4==1)//13
{
while(l3==0);
if(flag_mode == 1)
{
S_buff[S_wei] = 9;
display_SZ(2,S_wei,SZ[9]);
S_wei++;
}else if(flag_mode == 2)
{
Answer[Tit_Now-1] = 9;
display_SZ(3,4,SZ[9]);
}
}else if(l1==1 && h1==1 && h2==1 && h3==0 && l2==1 && l3==1 && l4==0 )//14
{
while(l4==0);
if(flag_mode == 2)
{
if(Tit_Now< 5)
{
Tit_Now++;
display_SZ(3,0,SZ[Tit[(Tit_Now-1)*2]]);
display_SZ(3,1,SZ[Tit_Now+10]);
display_SZ(3,2,SZ[Tit[(Tit_Now-1)*2+1]]);
display_SZ(3,3,SZ[16]);
display_SZ(3,10,SZ[Tit_Now]);
display_SZ(3,4,SZ[Answer[Tit_Now-1]]);
}
}
}
else
{
h3=1;
h4=0;
if(l1==0 && h1==1 && h2==1 && h3==4 && l2==1 && l3==1 && l4==1)//11
{
while(l1==0);
if(flag_mode == 1)
{
S_wei = 0;
CLear_N(1);
CLear_N(2);
display_HZ(1,0,HZ0[4]);
display_HZ(1,1,HZ0[5]);
display_HZ(1,2,HZ0[6]);
display_HZ(1,3,HZ0[7]);
display_HZ(1,4,HZ0[8]);
display_HZ(1,5,HZ0[9]);
display_HZ(1,6,HZ0[15]);
flag_mode = 0;
}
}else if(l1==1 && h1==1 && h2==1 && h3==4 && l2==0 && l3==1 && l4==1)//12
{
while(l2==0);
if(flag_mode == 1)
{
S_buff[S_wei] = 0;
display_SZ(2,S_wei,SZ[0]);
S_wei++;
}
}else if(l1==1 && h1==1 && h2==1 && h3==4 && l2==1 && l3==0 && l4==1)//13
{
while(l3==0);
if(flag_mode==2)
{
SEND_A();
flag_mode = 3;
}
}else if(l1==1 && h1==1 && h2==1 && h3==4 && l2==1 && l3==1 && l4==0 )//14
{
while(l4==0);
if(flag_mode == 0)
{
flag_mode = 1;
display_HZ(1,0,HZ0[10]);
display_HZ(1,1,HZ0[11]);
display_HZ(1,2,HZ0[12]);
display_HZ(1,3,HZ0[13]);
display_HZ(1,4,HZ0[14]);
display_HZ(1,5,HZ0[15]);
display_HZ(1,6,HZ0[16]);
CLear_N(2);
}else if(flag_mode == 1)
{
SEND_X();
}
}
}
}
}
}
void main()
{
UsartInit(); // 串口初始化
init();
Delay_xms(10);
display_HZ(0,0,HZ0[0]);
display_HZ(0,2,HZ0[1]);
display_HZ(0,4,HZ0[2]);
display_HZ(0,6,HZ0[3]);
display_HZ(1,0,HZ0[4]);
display_HZ(1,1,HZ0[5]);
display_HZ(1,2,HZ0[6]);
display_HZ(1,3,HZ0[7]);
display_HZ(1,4,HZ0[8]);
display_HZ(1,5,HZ0[9]);
display_HZ(1,6,HZ0[15]);
//display_SZ(1,6,SZ[2]);
while(1)
{
KEY_Scan();
}
}
void Usart_rec() interrupt 4
{
unsigned char datt;
if(RI == 1)
{
RI=0;
datt=SBUF;//出去接收到的数据
if(R_mode == 1)
{
R_buff[R_wei] = datt;
Tit[R_wei] = datt;
R_wei++;
if(R_wei == 10)
{
R_wei = 0;
R_mode = 0;
Tit_Now = 1;
display_SZ(3,0,SZ[Tit[0]]);
display_SZ(3,1,SZ[11]);
display_SZ(3,2,SZ[Tit[1]]);
display_SZ(3,3,SZ[16]);
display_SZ(3,10,SZ[Tit_Now]);
flag_mode = 2;
}
}
if(datt == 'D')
{
display_HZ(2,4,HZ0[17]);
display_HZ(2,6,HZ0[18]);
}else if(datt == 'X')
{
display_HZ(2,4,HZ0[19]);
display_HZ(2,6,HZ0[20]);
}else if(datt == 'T')
{
R_mode = 1;
}
}
}
void Timer0() interrupt 1 //参考上图 定时器1时为3
{
TH0=0XFC; //给定时器赋初值,定时1ms TH1
TL0=0X18; //TL1
dis_tim++;
if(dis_tim==1000)
{
dis_tim=0;
if(flag_mode == 2)
{
if(ALL_time!=0)
{
ALL_time -- ;
}else
{
SEND_A();
flag_mode = 3;
}
display_SZ(3,13,SZ[ALL_time/10]);
display_SZ(3,14,SZ[ALL_time%10]);
}
}
}
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6074文章
45337浏览量
663370 -
Proteus
+关注
关注
79文章
1692浏览量
110122 -
服务器
+关注
关注
13文章
10094浏览量
90866 -
仿真系统
+关注
关注
1文章
105浏览量
21622
发布评论请先 登录
相关推荐
热点推荐
51单片机双机通信
本帖最后由 诺言proteus 于 2013-5-7 10:39 编辑
谁有51单片机双机通信啊?要基于proteus的仿真图,和运行程序.asm或者.c的。一经录用。重谢啊!!
发表于 12-30 07:40
基于Proteus的嵌入式应用系统仿真中的源码调试
基于Proteus的嵌入式应用系统仿真中的源码调试
0 引 言 Proteus是功能最强的嵌入式系统(
发表于 12-22 17:49
•2389次阅读
(全套)基于PROTEUS电路及单片机系统设计与仿真
PROTEUS简介 PROTEUS ISIS 原理图输入 电路仿真与分析 人性化测量方法 高级电路设计与仿真 微处理器系统
发表于 09-10 10:08
•125次下载
双机串行通信的详细中文资料概述
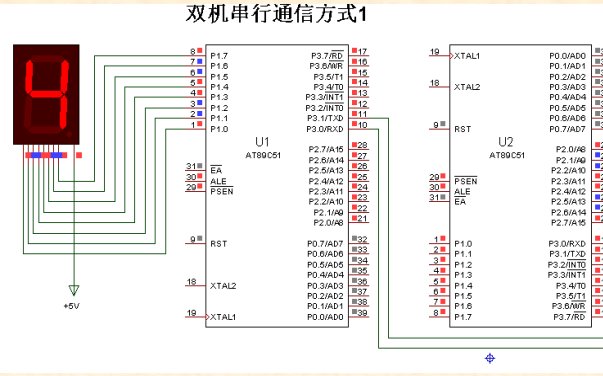
本文档的主要内容介绍的是双机串行通信的详细中文资料概述主要包括了2个部分:1 编制双机串行通信方式1程序,2 Keil编译调试和Proteus虚拟仿真
发表于 06-20 08:00
•24次下载






 工商网监
工商网监
评论