 基于Tricore的CANFD入门工程
基于Tricore的CANFD入门工程

汽车嵌入式开发,很多时候,想学一些东西(eg:CANFD),但又不知道如何下手,这应该是大多数刚入行工程师的苦恼。目前项目上,CANFD的使用已经很普遍,而单纯阅读芯片手册,可能无法透彻的理解CANFD,如果想透彻的理解CANFD,结合目标板去实践是不二选择。
官网的MCMCAN_FD_1_KIT_TC375_LK工程用的回环模式,并不能真实发送/接收报文,本文基于官网工程做了二次开发,希望此Demo可以助力大家高效学习CANFD。
本文环境:TC375开发板+Tasking编译器。
1、TC375 CANFD实现注意事项
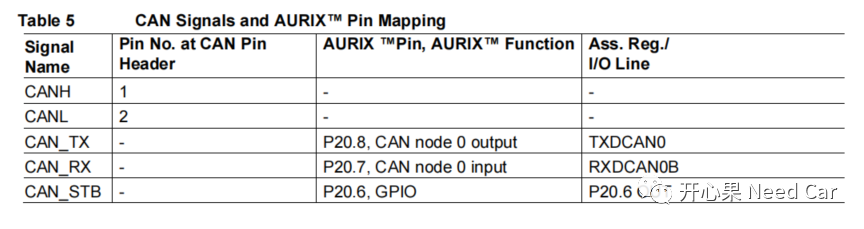
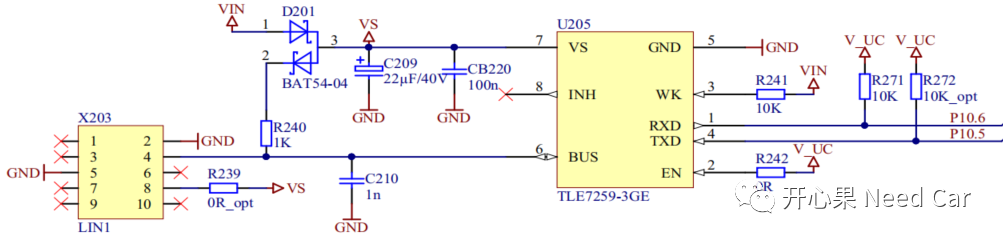
本文对实现过程中的几处细节,展开讨论。 (一)Transceiver的使能 按照手册描述,Transceiver型号为TLE9251V,Transceiver的使能需要拉低P20.6,使其进入Normal工作模式。
对应的代码实现如下:
void GPIO_init(void)
{
IfxPort_setPinMode(&MODULE_P20, 6, IfxPort_Mode_outputPushPullGeneral);
IfxPort_setPinLow(&MODULE_P20, 6);
}
(二)CAN_H、CAN_L Pin配置
代码实现如下:
IFX_CONST IfxCan_Can_Pins Can0PortInfo = {
.txPin = &IfxCan_TXD00_P20_8_OUT,
.txPinMode = IfxPort_OutputMode_pushPull,
.rxPin = &IfxCan_RXD00B_P20_7_IN,
.rxPinMode = IfxPort_InputMode_pullUp,
.padDriver = IfxPort_PadDriver_cmosAutomotiveSpeed1
};
(三)波特率设置
配置代码如下:
.baudRate = {
.baudrate = 500000,
.samplePoint = 8000,
.syncJumpWidth = 2000,
.prescaler = 0,
.timeSegment1 = 3,
.timeSegment2 = 10
},
.fastBaudRate = {
.baudrate = 2000000,
.samplePoint = 8000,
.syncJumpWidth = 2000,
.prescaler = 1,
.timeSegment1 = 3,
.timeSegment2 = 10,
.tranceiverDelayOffset = 0
},
如上,设置Normal段速率为500Kbps,Data段速率为2000Kbps,采样点均设置80%。
(四)接收过滤配置
配置代码实现如下所示:
.filterConfig = {
.messageIdLength = IfxCan_MessageIdLength_standard,
.standardListSize = 0,
.extendedListSize = 0,
.rejectRemoteFramesWithStandardId = 0,
.rejectRemoteFramesWithExtendedId = 0,
.standardFilterForNonMatchingFrames = IfxCan_NonMatchingFrame_acceptToRxFifo0,
.extendedFilterForNonMatchingFrames = IfxCan_NonMatchingFrame_acceptToRxFifo0
},
g_mcmcan.canFilter.number = 2;
g_mcmcan.canFilter.elementConfiguration = IfxCan_FilterElementConfiguration_storeInRxFifo0;
g_mcmcan.canFilter.type = IfxCan_FilterType_range;
g_mcmcan.canFilter.id1 = 0x166;
g_mcmcan.canFilter.id2 = 0x168;
g_mcmcan.canFilter.rxBufferOffset = IfxCan_RxBufferId_0;
(五)接收报文过滤实现 本文可以接收报文的范围为:0x166~0x168。 代码实现:
void IfxCan_Can_setStandardFilter(IfxCan_Can_Node *node, IfxCan_Filter *filter)
{
/* enable configuration change CCCR.CCE = 1, CCCR.INIT = 1 */
IfxCan_Node_enableConfigurationChange(node->node);
Ifx_CAN_STDMSG *standardFilterElement = ((uint32*)(node->messageRAM.baseAddress + node->messageRAM.standardFilterListStartAddress));
standardFilterElement->S0.B.SFID2 = filter->id2;
/* First ID of standard ID filter element. */
standardFilterElement->S0.B.SFID1 = filter->id1;
/* 001B Store in Rx FIFO 0 if filter matches */
standardFilterElement->S0.B.SFEC = 0x01;
/* 00B Range filter from SF1ID to SF2ID (SF2ID ≥ SF1ID) */
standardFilterElement->S0.B.SFT = 0x00;
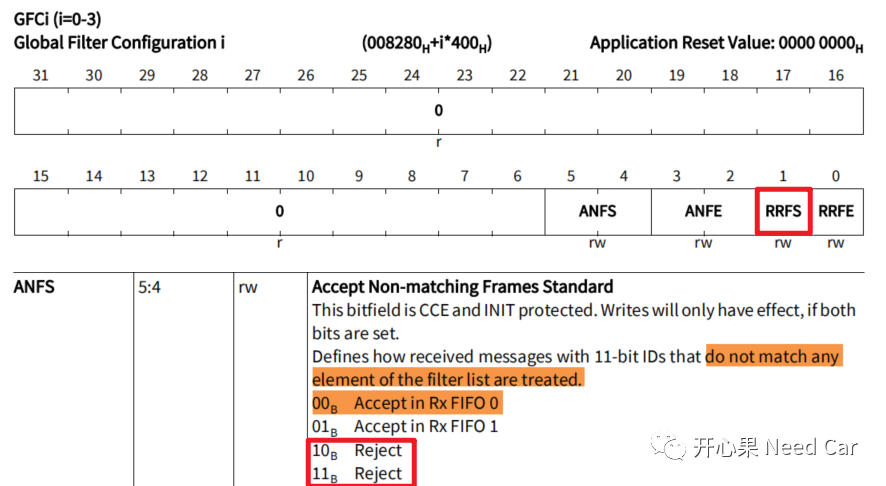
/* Defines how received messages with 11-bit IDs that do not match any
* element of the filter list are treated. (0x03)11B Reject */
node->node->GFC.B.ANFS = 0x03;
/* disable configuration change CCCR.CCE = 0, CCCR.INIT = 0 */
IfxCan_Node_disableConfigurationChange(node->node);
}
CAN报文的接收过滤主要设置两部分:
1、Global Filter Configuration
主要配置GFC寄存器,本文对Standard帧进行过滤处理,如果与设置的接收范围不匹配,则Rejet,设置GFC寄存器的ANFS位域,如下所示:
2、Standard Message ID Filter处理 标准CAN报文的ID过滤处理,即:设置每个邮箱过滤报文的范围或者指定一帧或者两帧CANID,如下所示:
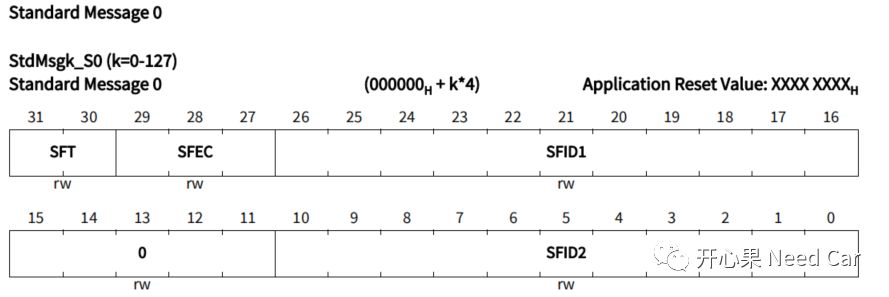
注意:Standard Message 0并不是一个具体的寄存器,而是CAN模块专用的RAM区,由实现者根据需要配置所使用的SRAM大小和起始地址。
而CAN模块SRAM区的切割要按照手册要求划分,如下所示:
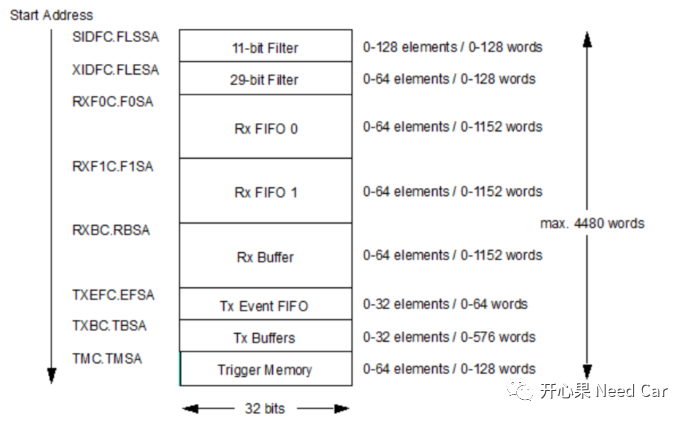
如上的过滤设置好以后,CAN Controller即按如下流程进行标准CAN FD报文的接收。
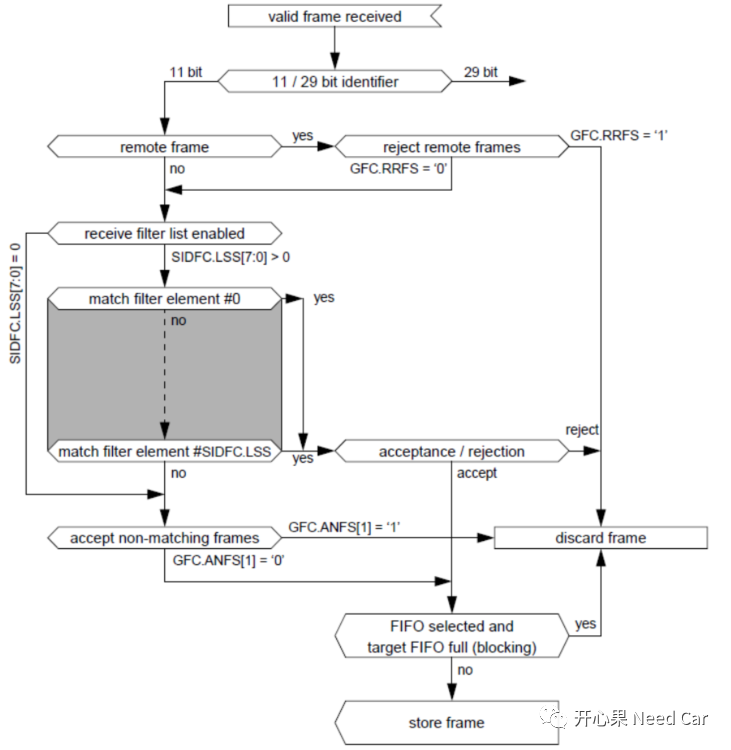
如上图,当接收设置了过滤以后,会对接收到的报文进行匹配,如果匹配则接收。当然,也可以不配置接收过滤,任意一帧报文均接收,但是,这样会增加CPU的开销。
2、CANFD对应的CAN_H、CAN_L波形
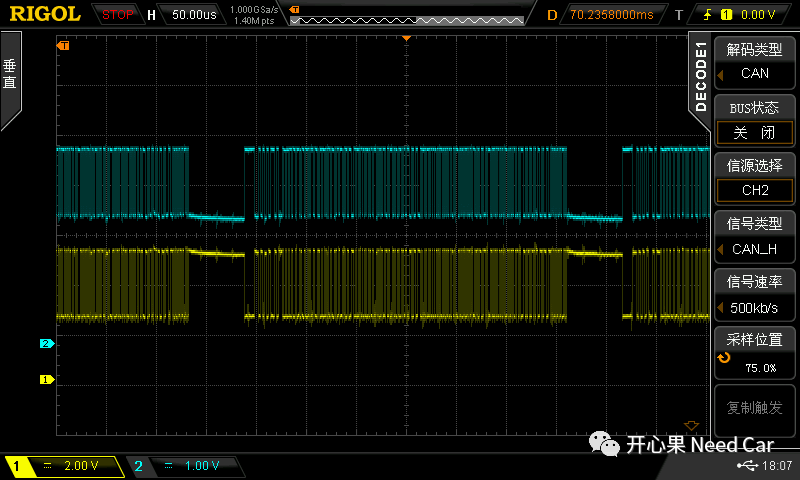
在500Kbps/2000Kbps通信速率下,一帧64Byte数据长度的CANFD报文(CANID 0x55),数据内容0x55或者0xAA,大概需要320us,如下所示:
利用示波器的Decode功能,对CAN报文进行解码,示例如下:
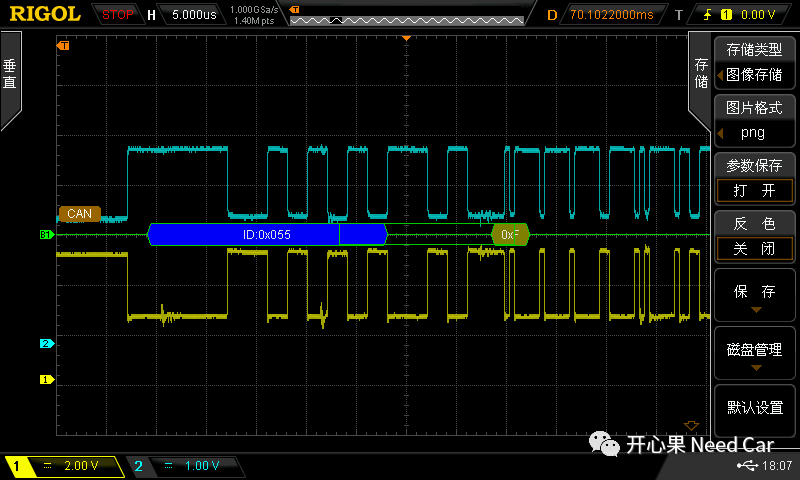
对应发送的报文如下所示,CAN ID = 0x55,可以对应如上的解析。

提示:本文使用的示波器不能解析CANFD,只能解析CAN,如上图,仅仅对Normal段的解析有效。 (一)一帧CAN报文的传输用时
如下图,一帧报文传输用时是一个范围,统计如下所示:
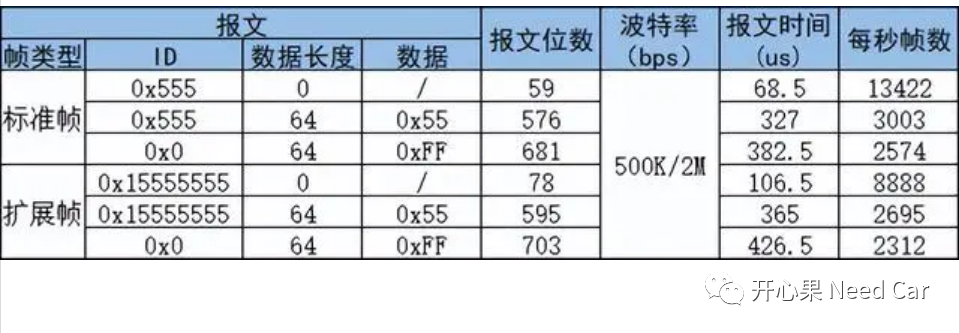
注释:上图来源群内小伙伴的分享,具体出处不详,此处分享做学习使用。 解释:为了确保数据传输的可靠,CAN在传输数据时,每5个相同位会插入一个反向位,也就是位填充(bit stuffing),eg:000001B,这里的1就是因为传输的0超过5个时,插入的反向位。所以,由于一帧CAN报文传输数据的变化,所以,一帧CAN报文传输用时会在一个范围内动态变化,如果CAN ID是0x555(10101010101B)或者0xAA(00010101010B),同时,数据段数据都是0x55或者0xAA,则这帧报文几乎不用额外插入反向位,因此用时更短。如果传输的数据是0x00(00000000B)或者0xFF(11111111B),则需要插入大量的反向位,因此,传输用时更长。
-
嵌入式
+关注
关注
5212文章
20766浏览量
338802 -
CAN
+关注
关注
59文章
3107浏览量
473838 -
编译器
+关注
关注
1文章
1673浏览量
52076 -
TriCore
+关注
关注
0文章
15浏览量
12113 -
CANFD
+关注
关注
0文章
106浏览量
5978
原文标题:基于Tricore的CANFD入门工程
文章出处:【微信号:谈思实验室,微信公众号:谈思实验室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
开发者分享:轻松搞起CANFD

玩转先楫CANFD外设系列之一:轻松搞起CANFD




评论