 RT-Thread 互补滤波器 (STM32 + 6 轴 IMU)
RT-Thread 互补滤波器 (STM32 + 6 轴 IMU)

大致流程:首先用 RT-Thread 的 icm20608 软件包读取 陀螺仪 (Gyroscope) 和 加速度计 (Accelerometer) 的数据,分别计算出估计的角度,再用互补滤波器 (Complementary Filter) 融合两个角度估计、进行校正,其实核心算法的代码就 7 行。最后串口把数据发到电脑上,用 Python + OpenGL 可视化。
Github - STM32 IMU 互补滤波器 (RT-Thread):https://github.com/wuhanstudio/stm32-imu-filter
IMU 传感器 (Inertial Measurement Unit)
我们先介绍下从 I2C 总线读取出传感器原始数值后,如何处理得到加速度和旋转角速度。一个六轴的 IMU 可以测量 x, y, z 三个方向的重力加速度,和绕三个轴的旋转角速度。比如,开发板如果静止放置在桌面上,会测量到 z 方向的重力加速度。
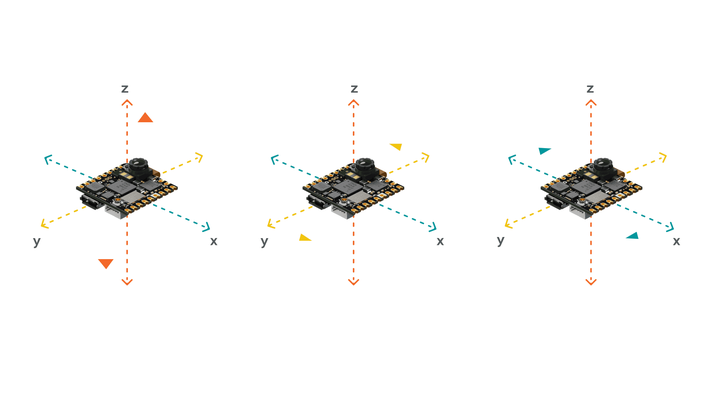
当然,如果开发板静止不动,绕三个轴的旋转速度都是 0。
由于传感器的输出实际上是来自 ADC 的 16 位数字信号,我们需要把它的单位转换成重力加速度 g。例如,我们可以选择测量范围
,默认是

,也就是把传感器的 16 位输出
映射到 [-2g, 2g),于是

也就是下面 icm20608 芯片手册的 Sensitivity Scale Factor。
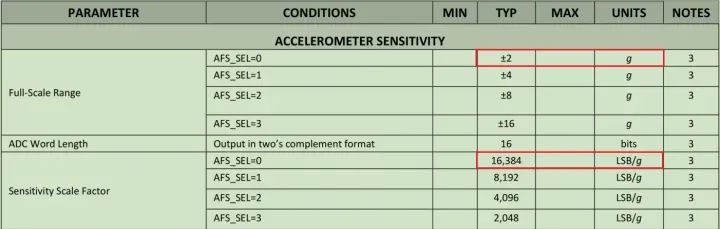
于是在代码里面,将原始的 int16 加速度数据除以 16384。
double aSensitivity = 16384;
accel_x = accel_x / aSensitivity;
accel_y = accel_y / aSensitivity;
accel_z = accel_z / aSensitivity;
同样,我们可以换算出角速度

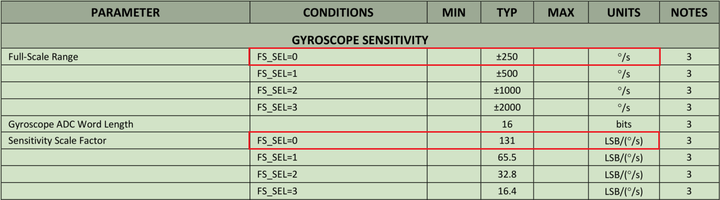
于是在代码里面,将原始的 int16 角速度数据除以 131。
double gSensitivity = 131;
gyrX = gyro_x / gSensitivity;
gyrY = gyro_y / gSensitivity;
gyrZ = gyro_z / gSensitivity;
这样我们就把 ADC 输出的 int16 原始数据分布转换成了加速度单位 g,和旋转角速度单位 °/s.
互补滤波器 (Complementary Filter)
我们可以用 互补滤波器 结合 加速度 和 旋转速度 的测量值,得到更准确的姿态预测。
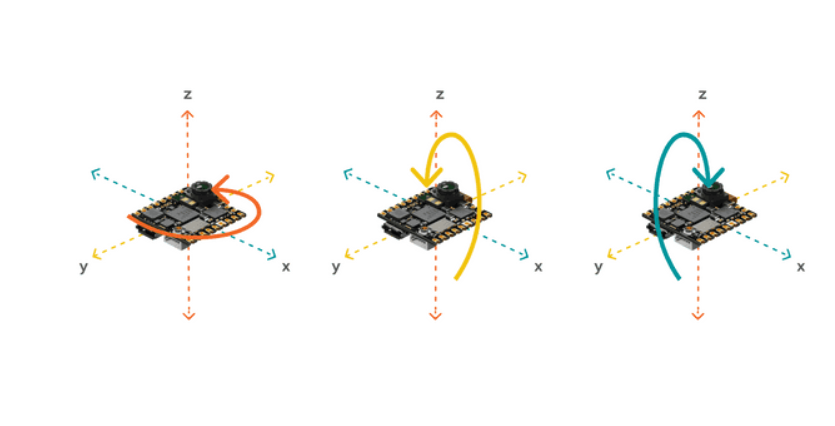
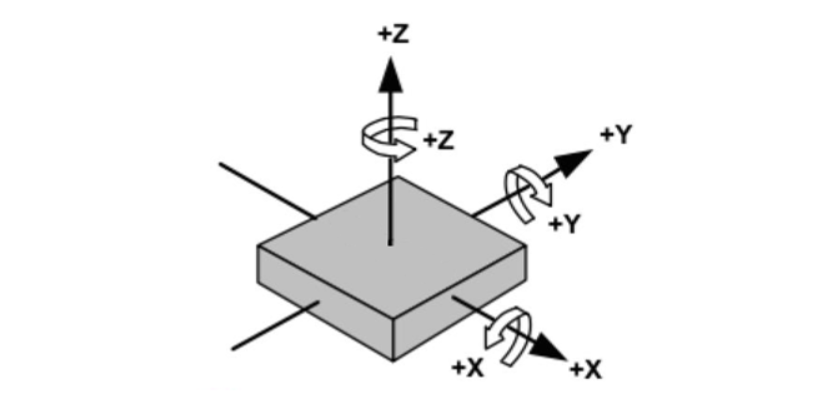
我们使用下面的图中的坐标系,绕 x 轴旋转的角度为 roll,绕 y 轴的旋转方向为 pitch,绕 z 轴旋转方向为 yaw。逆时针旋转为正,顺时针旋转为负。
陀螺仪估计姿态
陀螺仪测量的是瞬间的旋转角速度,所以位置的估计其实就是时间的积分。例如,每过 100ms 测量一次旋转速度,旋转速度 x 时间 = 旋转角度。
// angles based on gyro (deg/s)
gx = gx + gyrX * TIME_STEP_MS / 1000;
gy = gy + gyrY * TIME_STEP_MS / 1000;
gz = gz + gyrZ * TIME_STEP_MS / 1000;
当然,由于环境存在大量噪声,陀螺仪测量数据会存在随机的波动,这些噪声经过积分累积,最后会造成位置的漂移。比如下面这张图,过了很长时间后,虽然开发板是静止的,但是右边的陀螺仪估计的位置,就无法回到原点,这就是长时间的累计误差造成的。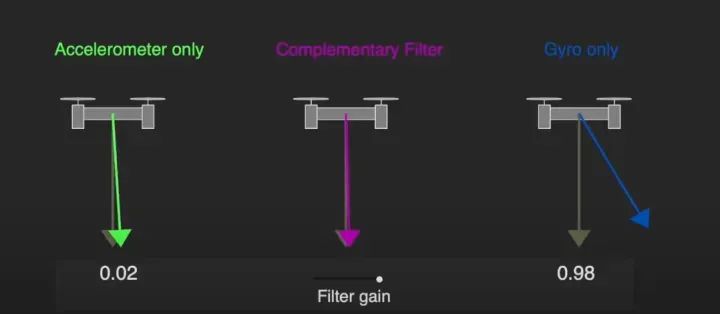
加速度计估计姿态
加速度计不需要积分,我们可以直接对当前加速度角度求 arctan 得到角度:
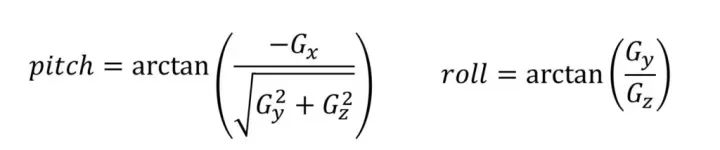
// angles based on accelerometer
ax = atan2(accelY, accelZ) * 180 / M_PI; // roll
ay = atan2(-accelX, sqrt( pow(accelY, 2) + pow(accelZ, 2))) * 180 / M_PI; // pitch
不管我们的开发板绕 z 轴旋转多少度,重力加速度始终朝向地面。因此开发板静止状态,我们无法利用重力加速度知道 z 轴的旋转角度 (yaw),所以上面只计算 roll 和 pitch,最终 z 轴的旋转角度 yaw 会出现累计积分误差。
互补滤波器
我们需要结合2个测量值是因为:旋转速度短时间内比较准确,但是由于环境的噪声会产生一些随机运动,时间长了就会漂移,而加速度短时间内不一定准确,但是最终会维持稳定。
于是我们就可以取长补短,线性叠加2个测量值的估计,给出更准确的估计。
// complementary filter
gx = gx * 0.96 + ax * 0.04;
gy = gy * 0.96 + ay * 0.04;
短时间内,我们相信陀螺仪测量的旋转角速度 (权值: 0.96);长时间内,环境噪声逐渐造成的漂移,由加速度计慢慢进行矫正 (权值: 0.04)。
总结
最后总结一下,其实核心代码一共就 7 行。我们先利用加速度求解姿态,再利用旋转角速度求解姿态,最后用互补滤波器进行一个线性叠加。
// angles based on gyro (deg/s)
gx = gx + gyrX * TIME_STEP_MS / 1000;
gy = gy + gyrY * TIME_STEP_MS / 1000;
gz = gz + gyrZ * TIME_STEP_MS / 1000;
// angles based on accelerometer
ax = atan2(accelY, accelZ) * 180 / M_PI; // roll
ay = atan2(-accelX, sqrt( pow(accelY, 2) + pow(accelZ, 2))) * 180 / M_PI; // pitch
// complementary filter
gx = gx * 0.96 + ax * 0.04;
gy = gy * 0.96 + ay * 0.04;
References
-
https://github.com/mattzzw/Arduino-mpu6050
-
https://github.com/RT-Thread-pa
点击阅读原文查看近期赛事
-
RT-Thread
+关注
关注
32文章
1640浏览量
45210
原文标题:RT-Thread 互补滤波器 (STM32 + 6 轴 IMU)
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
恩智浦亮相RT-Thread 20周年开发者大会
首搭RT-Thread程翧车控平台| RT-Thread程翧 S32K344 快速原型开发平台正式上市!| 产品动态
请问RT-Thread与stm32cubemx联合开发的原理是什么?
2025年RT-Thread开发者巡回培训报名正式启动!

rt-thread studio 2.2.9如何使用最新的RT-Thread v5.2.0 released?
STM32cubeMX生成配置rt-thread引用问题求解
【好书推荐】RT-Thread第20本相关书籍!《嵌入式实时操作系统RT-Thread原理与应用》| 技术集结
RT-Thread编译太慢怎么解决?
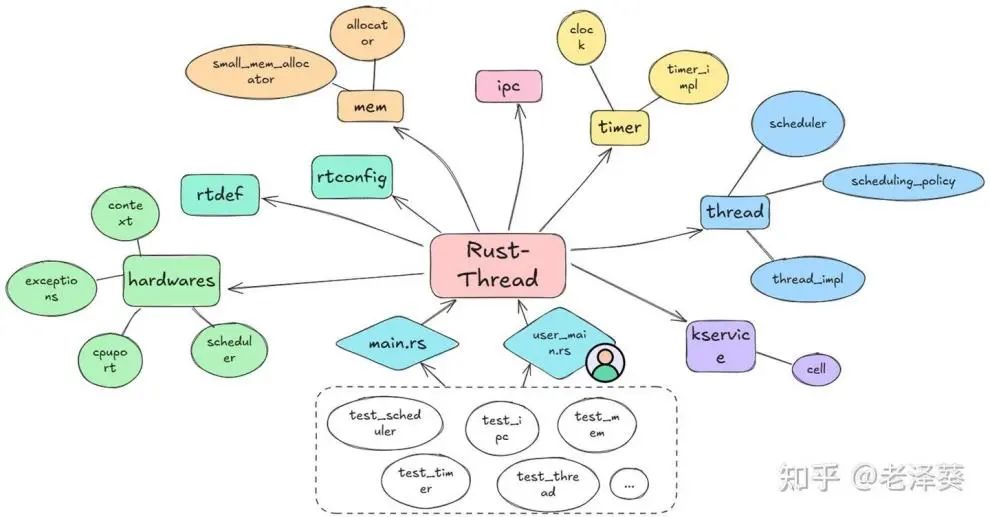
RT-Thread 遇上 Rust:安全内核 RusT-Thread 的诞生
RT-Thread荣获2025优秀开源项目 | 新闻速递

深度剖析 RT-Thread 线程调度流程

揭秘RT-Thread上的AUTOSAR CP系统
如何在rt-thread studio上开发STM32H747IIT6?
2025 RT-Thread全球技术大会议程正式发布!
RT-Thread审核团招募: 深度参与开源RTOS社区治理与演进



评论