 “麦克斯韦”断电了?NASA X-57项目将在不进行电动飞行的情况下结束
“麦克斯韦”断电了?NASA X-57项目将在不进行电动飞行的情况下结束

在历经了多年的各种技术问题和挫折后,美国国家航空航天局(NASA)于6月23日决定将在不进行试飞的情况下,于2023年9月底结束X-57“麦克斯韦”(Maxwell)电动飞机演示项目。
X-57“麦克斯韦”项目将在没有实现电动飞行的情况下结束。
在宣布这一决定的同时,X-57项目还透露发现了需要很长时间才能修复的“故障”。X-57项目的首席研究员肖恩·克拉克表示:“在此前对电动机进行详细分析和适航评估时,发现其在飞机飞行时有一些未在地面测试期间被发现的潜在故障模式。该电动机设计有几个特殊的故障模式,并可能会在飞行中停车,以此对飞行员造成安全隐患。”
X-57项目的工作人员目前仍在分析和试图解决这一问题,并拒绝透露该问题相关的更多细节。克拉克表示:“我们正在通过大规模的重新设计来修复电动机,但这需要很长时间才能完成和实施”。
这也促使X-57最终将在没实现电动飞行演示的情况下落幕。
1.X-57项目概况
X-57“麦克斯韦”的命名是为纪念著名的物理学家麦克斯韦。该验证机基于4座的“泰克南”(Tecnam)P2006T涡桨飞机改造而来,目的是验证全电动飞机技术和分布式动力增升技术,后者是一架常规布局的轻型双发飞机,机体结构重量很轻,因此被选作为基准机。
X-57项目的根本任务是技术突破,这也符合X系列试验机的一贯宗旨,研究的重点主要涉及气动布局和能源系统。
在气动设计方面,主要研究内容包括机翼设计、螺旋桨设计和附面层控制技术。为了兼顾高速特性和低速特性,最终的机翼设计方案进行了折中考虑。高速飞行时,靠大展弦比和翼尖螺旋桨实现高效巡航,这两个设计特征都可以减小机翼的诱导阻力。低速飞行时,机翼前缘的高升力推进器运转,使机翼上方气流加速,同时还有改善附面层状态的环量分布的能力,借此获得很高的升力系数,实现较短的起飞和着陆距离。
整个项目的关键是验证分布式电推进技术,还包括电动机设计制造、电机热管理技术、高能电池集成技术、电能分配与管理技术等等。
X-57项目的研究的重点主要涉及气动布局和能源系统。
虽然X-57与P2006T都采用常规布局,但X-57的机翼和气动力发生了很大变化。一是为提升气动效率而增大了机翼的展弦比。二是将两个动力螺旋桨移至翼尖,在提供巡航推进力的同时,也寄希望螺旋桨的旋流能够抵消翼尖涡,降低诱导阻力。三是在机翼前缘沿翼展方向分布式加装了12个电动螺旋桨,每侧机翼各6个,这些被称为“高升力推进器”,用于在起降阶段增加机翼的升力,改善起降性能。在巡航阶段,这些“高升力推进器”并不运作,螺旋桨桨叶也会折叠起来,以减小阻力。
按原本的计划,X-57项目主要分为四个阶段,NASA称之为“构型演进”,简称“Mod”,四个阶段分别为Mod I、Mod II、Mod III和Mod IV。
Mod I阶段:主要工作有两部分,测试P2006T飞机基本性能并研究电力推进概念,包括明确研发需求,进行飞机结构与子系统分析、设计与测试和分布式电推进系统的相关评估,会用地面试验台测试安装分布式高升力系统的机翼。
Mod II阶段:将P2006T的两台Rotax活塞发动机换为电动机,这一阶段全机的构型并未改变,只是将发动机在原位替换。目的是测试电动机、电池和仪表的性能,建立全电动系统的设计方法和对全电动系统的安全性进行验证。
Mod III阶段:将采用较薄的大展弦比复合材料机翼替换P2006T飞机的原始机翼,并将电动机和螺旋桨移至翼尖。机翼上安装了分布式发动机的短舱,但没有安装电机和螺旋桨。该阶段的目标是验证全机的高速性能,研究大展弦比机翼和翼尖推进方案的减阻效果。
Mod IV阶段:加装分布式电机和螺旋桨,主要研究低速性能,测试12个“高升力推进器”的效能,并与原始机型进行对比分析。
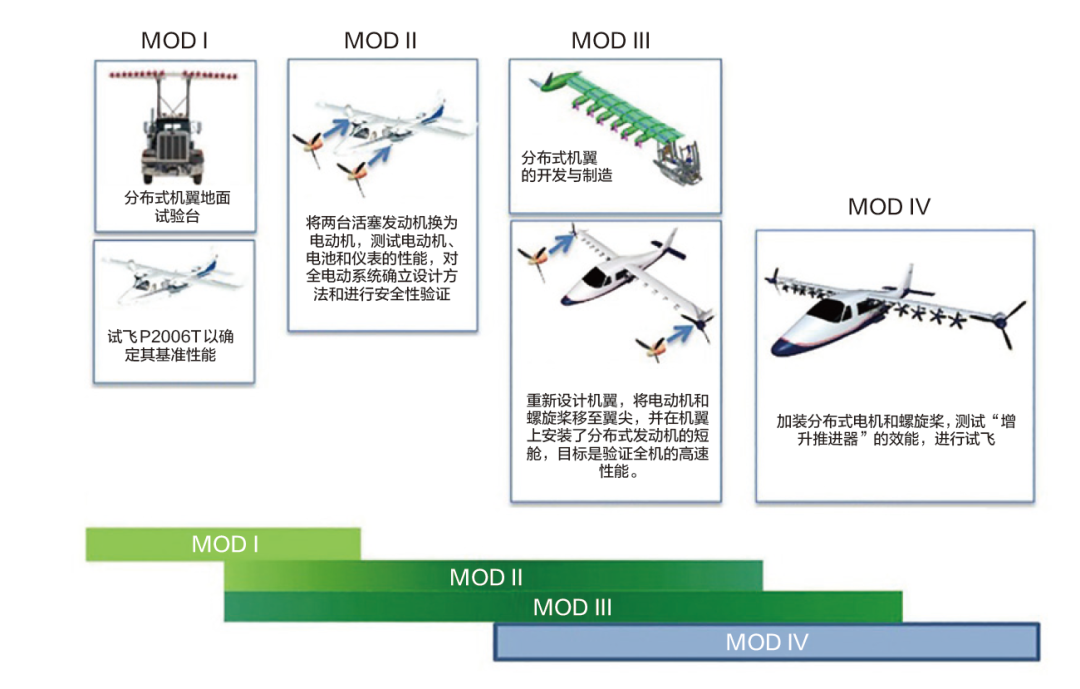
X-57的4个研究阶段及其构型。
2.X-57项目的发展
2015年,NASA对一架P2006T飞机进行了试飞,收集了升力、推力、巡航效率、能源使用和乘坐体验等数据。从2016年7月开始,用于X-57项目的P2006T机身和机翼开始在实验系统航宇公司的工厂改装,并与缩比复材公司共同负责将电力系统集成到P2006T机身。
NASA测试分布式高升力系统的地面试验台。
NASA阿姆斯特朗研究中心在2018年1月使用的“Airvolt”测试台开始对巡航电动机进行地面测试;2019年完成Mod III和Mod IV阶段的大展弦比机翼的载荷测试。NASA兰利研究中心于2020年在低速气动声学风洞中完成了“高升力推进器”的测试。
最初,NASA计划最快在2018年进行X-57 Mod II的电动首飞。但是由于存在电池系统、电气控制系统和电磁干扰等技术问题,以及之后的新冠疫情的爆发,使得该项目的进度大大落后于计划,目前仍停留在Mod II阶段。
在2023年6月15日举行的AIAA航空论坛上,X-57项目表示发现了使用的工业级滚珠轴承存在问题,迫使飞机重新设计了电动机,不过目前尚不清楚滚珠轴承问题是否与潜在的电机停车有关。
NASA格伦研究中心系统工程师戴夫·阿万尼森表示,X-57的两台推进电动机中选择的滚珠轴承等级“低于航空标准”,由此导致了无法预见的问题。由于滚珠轴承存在偏差,也导致在其他方面存在“超乎预期的振动”。 目前,由于种种故障与意外造成的监督延误,使NASA已经放弃了Mod III和Mod IV的配置,转而利用剩余时间尝试使修改Mod II,即便Mod II版本也将不会飞行。NASA选择将利用剩余的时间完成一些预期的技术验证,并发表相关论文去分享技术成果。
//3.小编浅见
看到X-57将以这种形式结束,还是感到几分意外,但或许也是情理之中。
一方面,在强调可持续航空的当下,电动飞机无疑是重要的发展方向。而随着近年来的不断发展,可持续航空燃料(SAF)、氢动力以及混合动力似乎是当下更为可行的选择。许多航空公司与发动机制造商的已经开始了SAF的试运营,Zeroavia的氢燃料验证机也多次成功试飞,这些或许比纯电动飞机有着更快、更现实的发展。
另一方面,全球电动飞机的发展或许比预想的要更快,尤其是在空中出租车领域。经过了几年的大浪淘沙,目前还留存在该领域的乔比航空、Lilium、Volocopter等公司都在逐渐杀出自己的道路,各型飞行器的动力模式也都各具特点,使得相关的电推进、电动机设计制造、热管理、高能电池集成等技术的发展比预期的更快。
-
电力
+关注
关注
8文章
2440浏览量
53154 -
电动机
+关注
关注
75文章
4211浏览量
101922 -
推进器
+关注
关注
1文章
35浏览量
5277
原文标题:“麦克斯韦”断电了?NASA X-57项目将在不进行电动飞行的情况下结束
文章出处:【微信号:CloudBrain-TT,微信公众号:云脑智库】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
S32K3 - 在什么情况下预计会发生STATUS_C40_IP_ERROR?
严格电磁场仿真的方法

麦克斯韦(Maxwell)的遗产 一位微波工程师的心得体会

禾赛科技推出RISC-V激光雷达主控芯片费米C500
禾赛科技激光雷达已累计交付超200万台
海微科技智能仓库2.0项目正式启动
rt-thread studio中创建不了gd32项目是怎么回事?
射频的起点:从麦克斯韦方程组说起
湃睿科技助力金源自动化PLM2.0项目圆满验收

电动汽车电机控制系统的测试 艾德克斯可编程电源和负载
信号走线长度:辐射发射的隐形 “操盘手”




评论