 焊接机器人经常出现的一些焊接缺陷
焊接机器人经常出现的一些焊接缺陷

焊接机器人常见的焊接缺陷包括焊偏、焊瘤、焊点飞溅、焊渣、咬边和气孔问题。
焊渣:焊渣是由焊接过程中产生的熔融金属或非金属材料的液滴形成的。热材料的液滴会从焊缝处喷出或焊渣并撞击工作台、地板、基材或其他周围区域。当它们冷却时,它们会在着陆的地方形成小圆球。
焊偏:焊接偏差是指焊接机器人在焊接过程中将焊枪偏离焊件,而不是沿着焊缝焊接。如有焊接偏差,焊枪将在焊缝周围焊接,造成焊件损坏。企业将消耗人力物力进行纠正,提高生产成本,延误生产工艺安排。
焊瘤:焊瘤是指在金属物在焊接过程中,通过电流造成金属焊点局部高温熔化,液体金属凝固时,在自重作用下金属流淌形成的像微小疙瘩
焊点飞溅:焊点飞溅多数是由于焊接参数选择不当、焊丝伸展过长或者焊接功率的大小。出现焊点飞溅就需要调整焊接参数和焊丝的长度,调节混合气体比例。
咬边:咬边是指由于焊接参数选择不当或操作方法不正确而造成的焊趾沿母材的沟槽或凹陷。咬边会减小母材的有效截面积,并可能在咬边处引起应力集中,在焊接低合金高强度钢时。咬边的边缘结构硬化,容易产生裂纹。
气孔:出现气孔可能是使用气体保护差、空气湿度太大或者焊件底漆太厚,可能根据焊接条件相应的进行调整。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
焊接
+关注
关注
38文章
3509浏览量
62760 -
焊接机器人
+关注
关注
16文章
351浏览量
15877
发布评论请先 登录
相关推荐
热点推荐
智能焊接机器人当前的技术瓶颈是什么
从产业现状看,中国智能焊接机器人已在钢结构、船舶、隧道桥梁、能源等领域实现规模化应用,且在上述行业中渗透率持续上升,呈现出显著的积极发展态势。这将为智能焊接机器人的大规模应用创造有利条件。
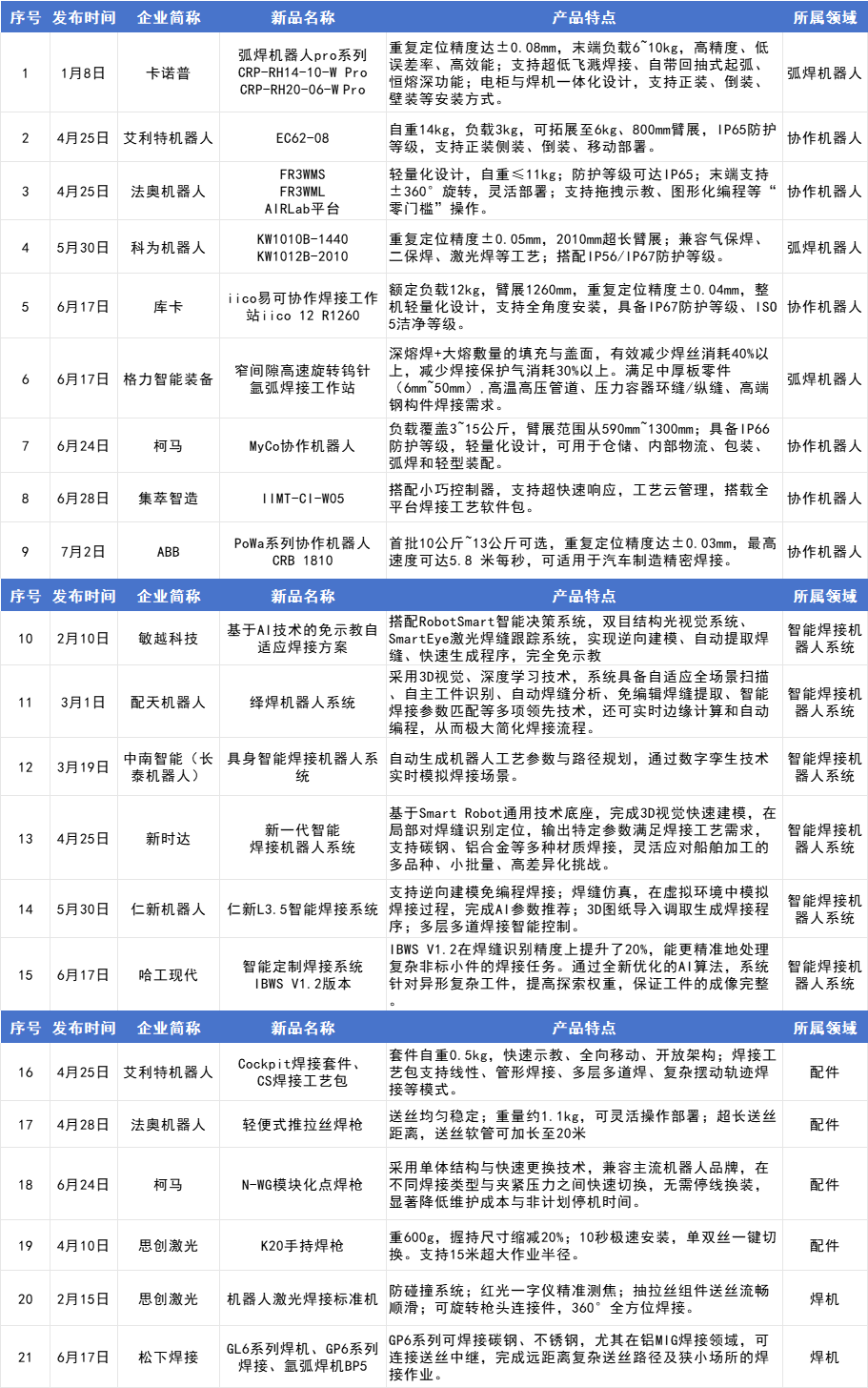
19家企业亮相2025高工焊接机器人技术与应用峰会(上)
近日,由高工机器人、高工机器人产业研究所(GGII),蕴硕物联协办,以“焊启智能新局,应用领航变革”为主题的2025(第四届)高工焊接机器人技术与应用峰会在上海新华联索菲特大酒店盛大启幕。
19家企业亮相2025高工焊接机器人技术与应用峰会(下)
近日,由高工机器人、高工机器人产业研究所(GGII),蕴硕物联协办,以“焊启智能新局,应用领航变革”为主题的2025(第四届)高工焊接机器人技术与应用峰会在上海新华联索菲特大酒店盛大启幕。
焊接机器人新品三大趋势分析
近年来,随着人口红利褪去,新生代劳动力就业意愿的变化,焊工行业面临“用工荒”的挑战,但船舶行业、汽车、钢构、重工等行业的景气度不减,这为焊接机器人的需求应用起量创造了条件。GGII(高工机器人产业研究所)数据显示,2024年全球弧焊机器
昇视唯盛持续推动智能焊接机器人技术升级
近两年,随着船舶、钢结构、核电等行业的蓬勃发展,以及产业链各环节技术的快速提升,焊接机器人迎来了革命性的发展契机。
新时达携手合作伙伴推出智能焊接机器人解决方案
船舶制造业作为典型的重工业领域,长期面临焊接工艺复杂、工件差异化高、小批量生产需求多等挑战。传统焊接机器人依赖固定编程,难以适应动态场景,导致效率瓶颈与人工依赖并存。
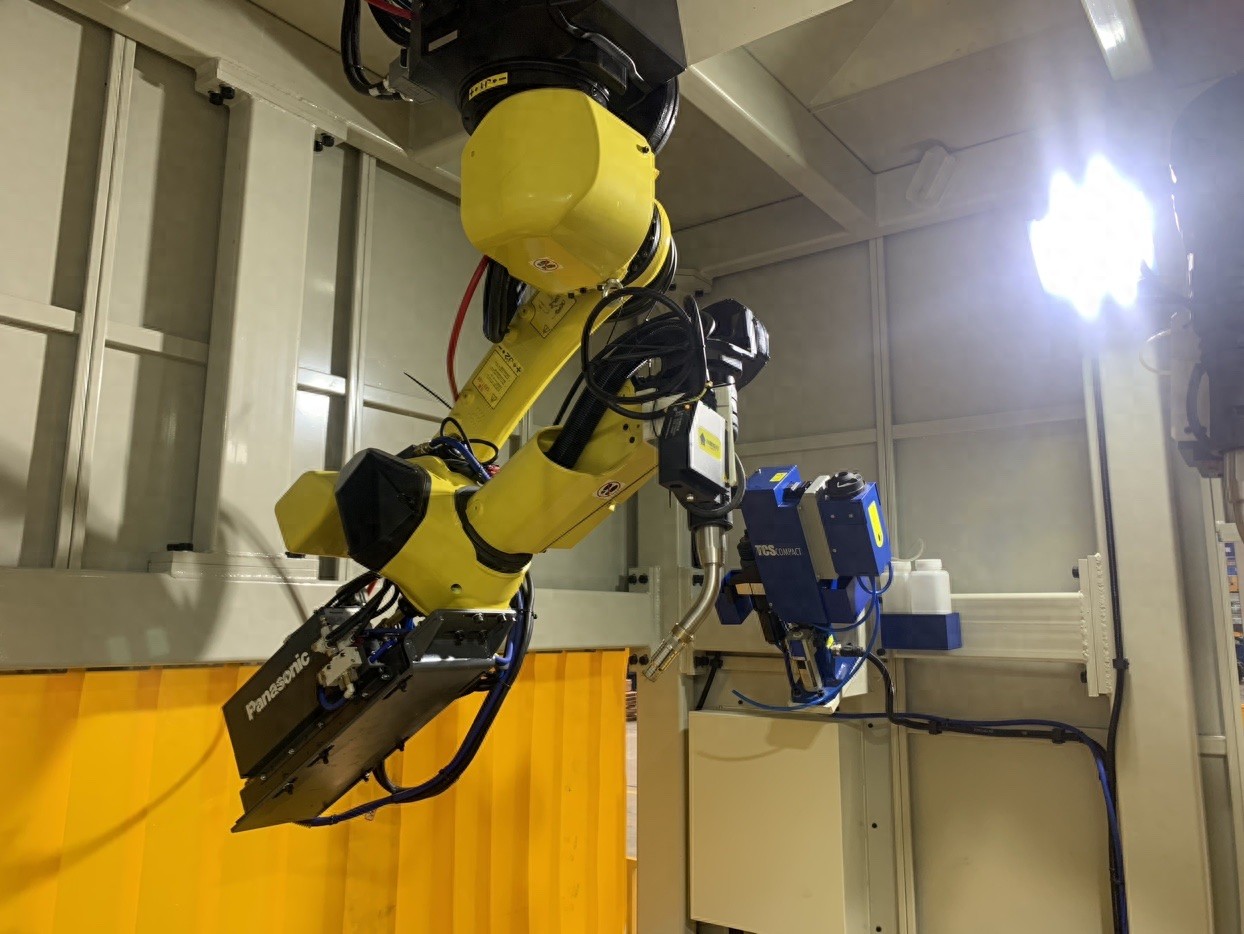
汽车产线焊接机器人项目应用分享-阿童木单双张检测器
一、项目背景客户作为一家专注于焊接机器人研发与生产的企业,承接了一项汽车零部件焊接的重要项目。在该项目的生产线上,所使用的材料为厚度1.2m
汽车焊接机器人的智能控制系统研究进展
汽车制造业作为全球工业的重要组成部分,其生产效率和产品质量直接影响到整个行业的竞争力。在这一过程中,焊接技术的应用尤为关键,而焊接机器人作为现代汽车制造中的重要工具,其智能化水平的提升对于提高生产
如何选择超声波焊接机
在现代工业生产中,超声波焊接技术因其高效、环保和精确的特点而被广泛应用于塑料制品的连接。选择一台合适的超声波焊接机对于提高生产效率和产品质量至关重要。 1. 焊接需求分析 在购买超声波
精准对接:焊接机器人视觉定位系统如何革新制造工艺
随着制造业的自动化水平不断提高,焊接工艺也在向更高效、更精确的方向发展。尤其是在自动化焊接领域,视觉定位系统的引入为焊接机器人提供了前所未有的精度和灵活性。今天一起了解
视觉定位在焊接机器人中的作用
随着制造业对精度、效率和自动化程度的要求不断提高,焊接机器人在现代工业生产中扮演着越来越重要的角色,广泛应用于汽车制造、工程机械、家电等多个行业。而视觉定位技术作为焊接机器人不可或缺的关键组成部分
焊接机器人视觉定位:精准制造的核心技术
在现代制造业中,自动化与智能化已经成为提升生产效率、保证产品质量的关键因素,焊接机器人在生产过程中扮演着越来越重要的角色。视觉定位技术作为焊接机器人实现精准制造的关键环节,正不断推动自动化焊接工艺的升级和革新,成为精密制造领域不





 工商网监
工商网监
评论