 旭日X3派WiringPi安装
旭日X3派WiringPi安装

安装WiringPi
安装git工具,执行以下命令:
sudo apt update sudo apt install git-core
通过git在线获取WiringPi的源代码,执行以下命令:
git clone https://gitee.com/study-dp/WiringPi.git
进入WiringPi目录安装WiringPi。执行以下命令:
cd WiringPi ./build.sh
build.sh 脚本会自动完成WiringPi库的编译与安装。
查看命令帮助信息
命令: gpio -h
root@ubuntu:~# gpio gpio: At your service! Type: gpio -h for full details and gpio readall for a quick printout of your connector details root@ubuntu:~# gpio -h gpio: Usage: gpio -v gpio -h gpio [-g|-1] ... gpio [-d] ... [-x extension:params] [[ -x ...]] ... gpio [-p] ... gpio ... gpio gpio readall gpio unexportall/exports gpio export/edge/unexport ... gpio wfi gpio drive gpio pwmf gpio pwmd gpio i2cd/i2cdetect gpio rbx/rbd gpio wb gpio gbr gpio gbw
主要命令说明:
readall:读取所有管脚的信息,显示管脚名称和Physical,BCM、xPi三种模式的管脚编号
-g: 命令中的pin参数默认使用 BCM序号,如果设置本参数,则使用旭日X3的gpio内部编号( xPi序号),各模式的编号详情请通过 gpio readall获取
-l: 通过 /sys/class/gpio目录下的文件进行管脚操作,否则都是直接通过操作旭日X3的寄存器操作
-p:使用硬件 Physical 编号作为pin的编码模式
mode: 设置管脚的模式,支持以下模式的设置
in,input: 设置管脚为gpio输入
out,output:设置管脚为gpio输出
pwm,pwmTone: 设置管脚为pwm模式
up: 设置管脚上拉
down:设置管脚下拉
tri,off: 管脚关闭上下拉
read: 读取管脚的输入电平
write: 设置管脚的输出电平
toggle:使管脚的输出电平反转
blink: 使管脚进入到闪烁状态
unexportall:通过 /sys/class/gpio目录下的文件释放所有管脚
exports:显示通过 /sys/class/gpio申请的管脚列表
export/edge/unexport:通过通过 /sys/class/gpio对单个管脚进行申请和释放,设置触发模式
wfi:管脚设置为输入模式,并且设置中断响应模式
drive: 设置管脚的电流驱动强度
pwmf: 设置pwm的时钟周期,输入值为频率,例如48000表示48KHz, 取值范围最小48000
pwmd:设置pwm的高电平占空比,取值范围1-100
i2cd/i2cdetect: 显示I2C总线上的设备信息
rbx/rbd: 读取0-7这一组管脚的电平值
原作者:AI搬砖客
原链接:本文转自地平线开发者社区
-
嵌入式
+关注
关注
5186文章
20155浏览量
328970 -
人工智能
+关注
关注
1813文章
49746浏览量
261605
发布评论请先 登录
半年参与3万辆宝马X3生产,人形机器人“进厂打工”真成了

华为路由 X3 Pro火了!业界首发Wi-Fi7+和透明天线,1299元起

安谋发布“周易”X3 NPU,破局AI算力,智绘未来蓝图
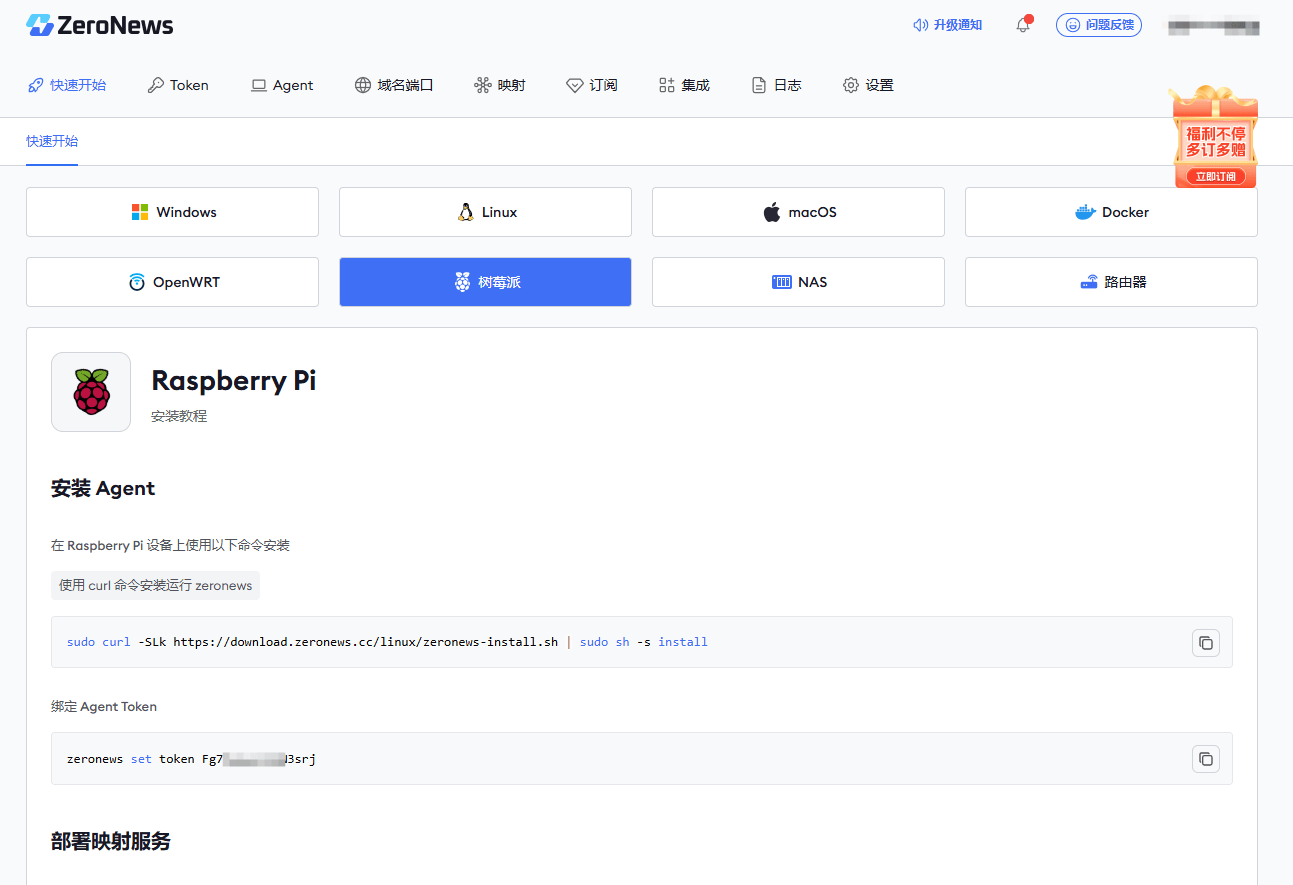
基于树莓派(RaspberryPi)构建高效实时监控系统
奇瑞风云X3系列双车上市
树莓派会中病毒嘛?需要安装杀毒软件吗?

基于树莓派的工业级 3D 打印机!
用树莓派“揪出”家里的耗电怪兽!
韵乐Vinal X3/X5卡拉OK音频处理器调音软件简介
RDK X3 带飞的智能护理系统:让机器人秒变贴心小棉袄

HMC-XTB110 无源x3倍频器,24-30GHz输入技术手册
九号公司Segway Navimow X3割草机器人获TÜV莱茵"高效割草"Quality-mark认证


deepin 23+树莓派让小车动起来






 工商网监
工商网监
评论