 视觉纹理导航,亦称Visual SLAM导航
视觉纹理导航,亦称Visual SLAM导航

视觉纹理导航,亦称Visual SLAM导航,通过自动导引车车载视觉传感器获取运行区域周的图像信息来实现导航的方法。视觉导航是以地面纹理为特征信息的视觉导航AGV。
硬件上需要视觉工控机、下视摄像头、补光灯和遮光罩等来支持该种导航方式的实现,可利用丰富的地面纹理信息,并基于相位相关法计算两图间的位移和旋转,再通过积分来获取当前位置。
该方式通过移动机器人在移动过程中摄像头拍摄地面纹理进行自动建图,再将在运行过程中获取的地面纹理信息,与自建地图中的纹理图像进行配准对比,以此估计移动机器人当前位姿,实现移动机器人的定位。
优点:
• 与二维码对比:无需铺设标记物,保持地面清洁。
• 与激光SLAM对比:已有下对环境要求较相当苛刻。
缺点:
• 采集纹理库,工作量大。
• 与二维码导航暂不融合。
• 技术还在完善,暂不广泛推广。
深圳市不止技术有限公司是激光雷达行业知名企业,团队自2016年底就开始了多款激光雷达方案的研发,并创造了30多件发明专利,是一家能提供单点、单线到多线全系列、dtof、itof全品类激光雷达方案定制化的公司.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
AGV
+关注
关注
28文章
1585浏览量
43851 -
激光雷达
+关注
关注
983文章
4597浏览量
197411
发布评论请先 登录
相关推荐
热点推荐
低成本组合导航系统:让精准导航不再昂贵
在无人系统、精准农业和自动驾驶快速发展的今天,高精度导航早已成为刚需。然而,传统高端导航系统动辄数万甚至数十万元的成本,让许多中小型企业和创新团队望而却步。如今,这一局面被彻底打破——ER-GNSS

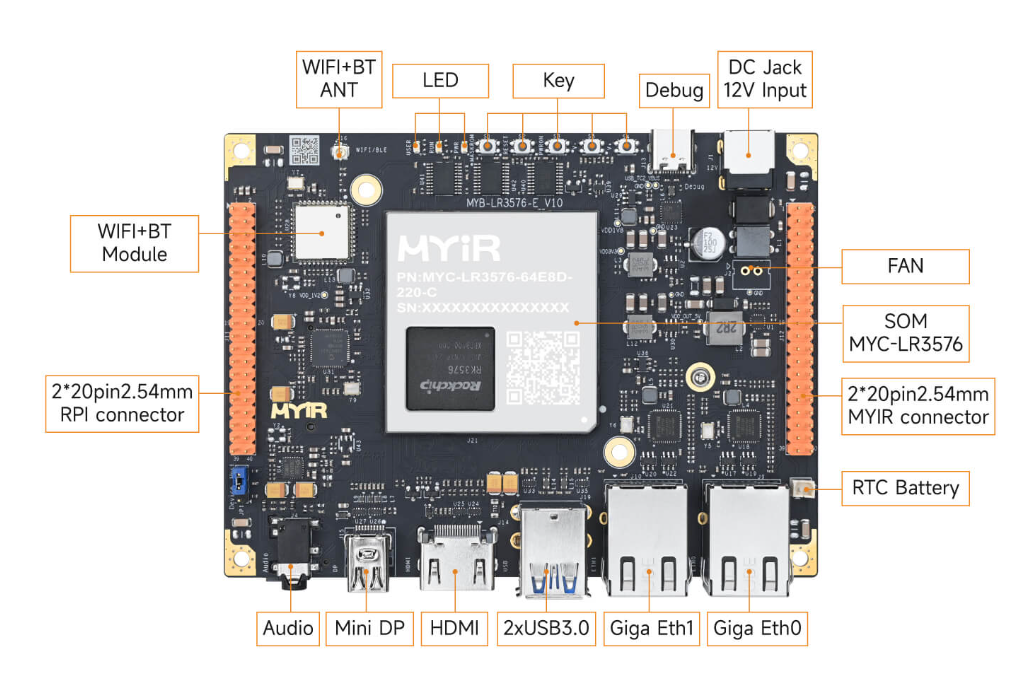
ROS2 SLAM建图与导航实战--基于米尔RK3576开发板
前言
文档定位与目标读者
本文档面向具备一定ROS基础、希望深入理解并在实际项目中部署ROS2 Humble + SLAM Toolbox + Nav2完整建图与导航系统的机器人工程师。我们将从
发表于 03-12 17:55
RK3576 + ROS2 SLAM建图与导航实战
RK3576开发板逐步构建一个功能完备的自主移动机器人系统,涵盖环境搭建、机器人建模、SLAM建图、自主导航以及生产级系统的优化与排错。为什么选择SLAMToolbo
面向视觉语言导航的任务驱动式地图学习框架MapDream介绍
在视觉语言导航(VLN)中,地图长期作为独立模块构建,并通过固定接口交由导航策略使用。无论是BEV网格、拓扑图还是语义记忆模块,这些表示大多脱离策略学习而设计。结果是,机器人即使掌握场景的信息,也仍可能绕行甚至偏离目标,因为地图

告别导航盲区!MEMS组合导航系统,精准定位
在无人机飞行、智能无人车行驶、水下航行器作业等场景中,导航的精准度、连续性和稳定性直接决定作业效率与安全,复杂的隧道、城市峡谷、电磁干扰环境,往往成为传统导航设备的 “失灵盲区”。ER-GNSS

组合导航不知道怎么选,看这里
单一导航难适配复杂作业?MEMS组合导航来帮你,通过融合卫星定位与惯性测量技术,以“1+1>2”优势破解全行业导航难题。 我司组合导航提供三种方案可选,从01到03到05,搭载从
组合导航核心问题解答
组合导航的信息感知核心—基于MEMS技术的微型化传感器 MEMS微机电技术,可将MEMS陀螺仪与MEMS加速度计集成在毫米级芯片上,使组合导航体重、数量缩小几个级别,这是组合导航能被轻松集成于狭小
还在为导航成本高而烦恼?组合导航开启低成本新时代
ER-GNSS/MINS-05低成本组合导航系统的出现,彻底打破了这一僵局——它以创新技术实现硬件成本直降,同时通过深度优化平衡精度、可靠性与稳定性,为行业提供了一套“性能不妥协、成本可控制”的全参数导航解决方案,重新定义了低成本导航
MEMS组合导航系统能否成为多领域导航的“全能王者”?
在现代化作业场景中,高精度、高可靠性的导航系统已成为各领域不可或缺的核心设备。ER-GNSS/MINS-01 MEMS组合导航系统作为一款将卫星定位与惯性测量技术融合的创新产品,犹如一颗璀璨的新星

组合导航系统如何实现多源融合破解单一导航局限
无论是自动驾驶汽车、无人机巡检,还是精准农业、飞行记录仪,高精度、高可靠的导航都是核心需求。然而,传统导航技术各有短板:卫星导航(GNSS):信号易受遮挡(如城市峡谷、隧道),且易受干扰或欺骗。惯性

为什么选择组合导航?它有哪些优势?
在现代导航技术中,单一的导航系统往往难以满足高精度、高可靠性的需求。全球导航卫星系统(GNSS)虽然能提供全球覆盖的定位信息,但在城市峡谷、隧道或电磁干扰环境下,其信号容易丢失或受到干扰。而微惯性

低成本组合导航能实现精准导航定位
在自动化、无人系统和精准农业等领域,高精度导航是核心需求,但传统高端组合导航系统的高成本往往让许多用户望而却步。ER-GNSS/MINS-05作为一款低成本组合导航系统,通过技术优化与精准性能平衡

组合导航系统中的惯性导航系统是什么?
在现代导航技术领域,惯性导航系统(INS)扮演着至关重要的角色,特别是在与全球导航卫星系统(GNSS)结合使用时,能够提供连续、可靠且高精度的定位、速度和姿态信息。
组合导航系统中的惯性导航系统是什么?
在现代导航技术领域,惯性导航系统(INS)扮演着至关重要的角色,特别是在与全球导航卫星系统(GNSS)结合使用时,能够提供连续、可靠且高精度的定位、速度和姿态信息。 惯性导航系统的基本



评论