 Delta型腿机器狗全动作展示
Delta型腿机器狗全动作展示

1. 功能说明
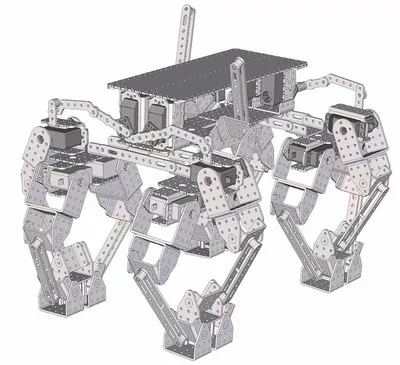
本文示例将实现R322样机Delta型腿机器狗维持身体平衡、原地圆形摆动、原地踏步、蹲起、站立、前进、后退、转向、横向移动、斜向移动等功能。
2. 电子硬件
本实验中采用了以下硬件:
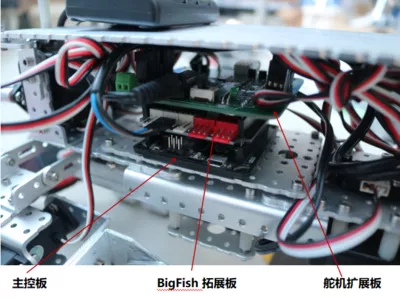
| 主控板 | Basra主控板(兼容Arduino Uno) |
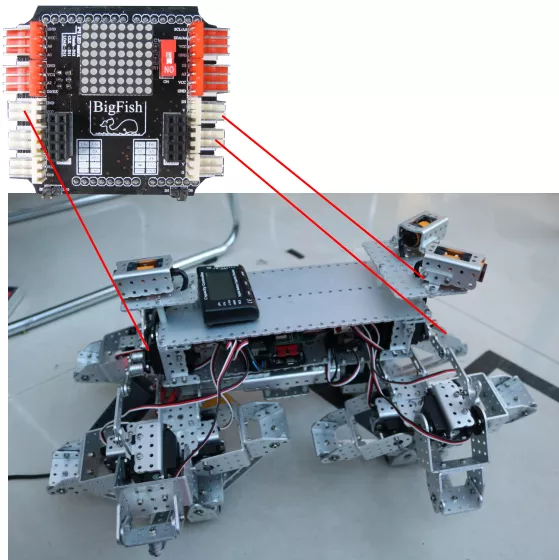
| 扩展板 | Bigfish2.1扩展板 |
| SH-SR舵机扩展板 | |
| 传感器 | 近红外传感器 |
| 六轴陀螺仪 | |
| 电池 | 7.4v锂电池、11.1V动力电池 |
| 其它 | 电压显示器 |
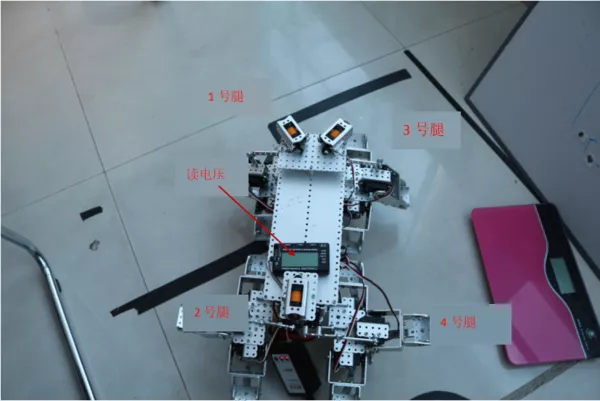
电路连接说明:为了便于识别控制Delta型腿机器狗,我们先对机器狗的腿位置编号(如下图所示):
① 硬件连接:
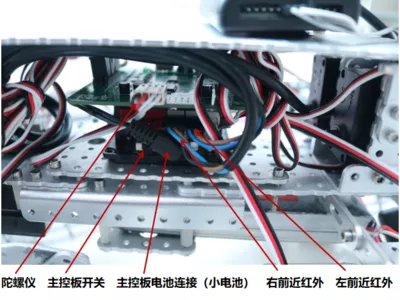
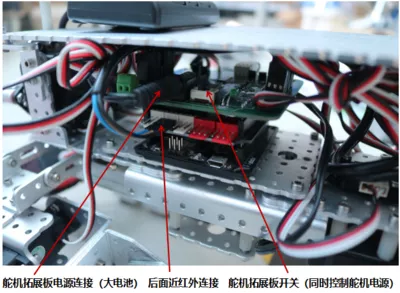
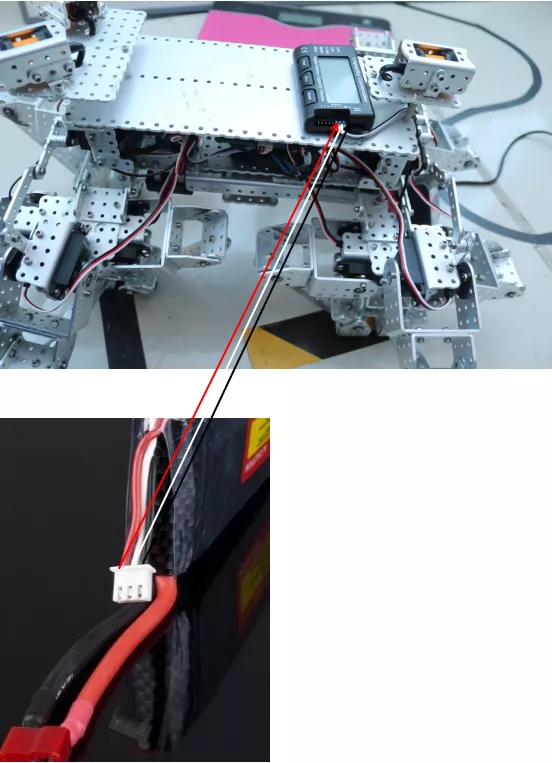
② 电压显示器与大电池连接:
③ 舵机接线位置:上面3个舵机分别连接在Bigfish扩展板的D4、D3、D8端口。
Delta型腿机器狗每条腿有4个舵机,4条腿上总共有16个舵机,将这16个舵机分别连接在SH-SR舵机扩展板的舵机接口上。
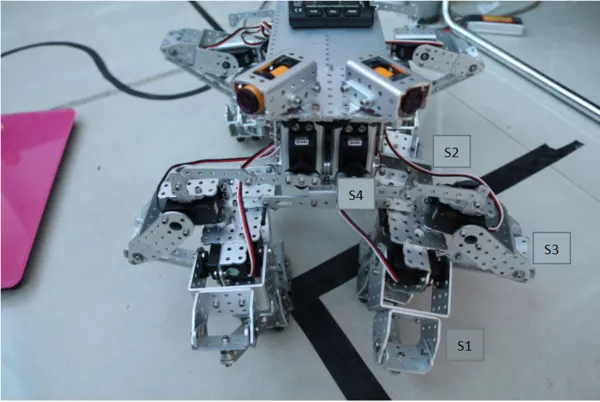
1号腿 :s1连接口9 s2连接口8 s3连接口5 s4连接口6
2号腿 :s1连接口18 s2连接口19 s3连接口20 s4连接口21
3号腿 :s1连接口0 s2连接口2 s3连接口1 s4连接口3
4号腿 :s1连接口27 s2连接口25 s3连接口26 s4连接口24
3. 功能实现
编程环境:Arduino 1.8.19
下面提供一个Delta型腿机器狗全动作展示(维持身体平衡、原地圆形摆动、原地踏步、蹲起、站立、前进、后退、转向、横向移动、斜向移动)的参考例程(parallel_dog_display.ino),程序源代码及样机3D文件资料详见 https://www.robotway.com/h-col-242.html,具体实验效果可参考网站演示视频。
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2023-06-07 https://www.robotway.com/ ------------------------------*/ /***** Copyright 2017 Robot TIme 全动作展示例程 *****/ #include "Tlc5940.h" #include "tlc_servos.h" #include < math.h > #include "types.h" #include "config.h" // 相关函数声明 /***** 红外相关函数 *****/ void IRInit(); //红外初始化 void enableIR(); //红外使能 void disableIR(); //关闭红外 void updateIR(); //红外避障更新动作 /***** 平衡相关函数 *****/ void switchAdjustStat(uint stat); //切换平衡调节模式 不调节/原地调节/行进间调节 void readGyroSerial(); //读取陀螺仪串口消息 void adjustAct(); //平衡调节动作 /****** 腿部动作相关函数 *****/ void setTurnLeftFlag(bool flag); //修改左转状态标志位 void setTurnRightFlag(bool flag); //修改右转状态标志位 void leg1(); //更新1号腿(左前)位置 void leg2(); //更新2号腿(左后)位置 void leg3(); //更新3号腿(右前)位置 void leg4(); //更新4号腿(右后)位置 bool calc(Point3d p, bool leg1, bool leg2, bool leg3, bool leg4); //逆解计算函数 /***** 整机动作相关函数 *****/ void dogReset(Point3d initPos, uint waitTime); //复位动作 void dogInit(); //初始化动作 void upDown(float x, float y, float z1, float z2, uint times); //蹲起动作 void drawCircle(float ox, float oy, float z, float r, uint times); //原地圆形摆动动作 void stepping(float x, float y, float z1, float z2, uint times); // 原地踏步动作 void liftShoulder(uint height, uint times); //原地摆臂动作 //动作周期计数器 int cycleCount; //复位计数器 void resetCycleCount() { cycleCount = -1; } void updateCycleCount() { cycleCount++; } //当前运动状态 dogMode currentMode; //切换运动状态 void setMode(dogMode mode) { if (mode == currentMode) return; if (mode == DOG_MODE_TURN_LEFT) { setTurnLeftFlag(true); setTurnRightFlag(false); } else if (mode == DOG_MODE_TURN_RIGHT) { setTurnLeftFlag(false); setTurnRightFlag(true); } else { setTurnLeftFlag(false); setTurnRightFlag(false); } if (mode == DOG_MODE_BACK) //后退时关闭红外传感器 { disableIR(); } else if (mode == DOG_MODE_STOP) //静止后开始原地姿态调节 { switchAdjustStat(ADJUST_STAT_LEG); dogReset({0, 0, Leg_Init_Z_Pos}, 200); } currentMode = mode; } void updateMode() { if (cycleCount == MOTION_TIMES + 1) setMode(DOG_MODE_BACK); if (cycleCount == 3 * MOTION_TIMES) setMode(DOG_MODE_LEFT); if (cycleCount == 4 * MOTION_TIMES) setMode(DOG_MODE_RIGHT); if (cycleCount == 5 * MOTION_TIMES) setMode(DOG_MODE_RIGHT_FRONT); if (cycleCount == 6 * MOTION_TIMES) setMode(DOG_MODE_RIGHT_BACK); if (cycleCount == 7 * MOTION_TIMES) setMode(DOG_MODE_LEFT_BACK); if (cycleCount == 8 * MOTION_TIMES) setMode(DOG_MODE_LEFT_FRONT); if (cycleCount == 9 * MOTION_TIMES) setMode(DOG_MODE_TURN_LEFT); if (cycleCount == 10 * MOTION_TIMES) setMode(DOG_MODE_TURN_RIGHT); if (cycleCount == 11 * MOTION_TIMES) setMode(DOG_MODE_STOP); } void setup() { //陀螺仪连接串口,波特率115200 Serial.begin(115200); //舵机驱动板初始化 Tlc.init(0); tlc_initServos(); // Note: this will drop the PWM freqency down to 50Hz. //红外传感器初始化 IRInit(); //大狗身体初始化 dogInit(); //原地摆臂动作一次 liftShoulder(40, 1); delay(500); //原地做圆形摆动3周 drawCircle(0, 0, -120, 60, 3); delay(500); //原地蹲起3次 upDown(0, 0, -160, -90, 3); delay(500); //原地踏步6次 stepping(0, 0, -150, -100, 6); delay(500); resetCycleCount(); enableIR(); switchAdjustStat(ADJUST_STAT_TRACK); setMode(DOG_MODE_FRONT); } void loop() { //姿态调节 adjustAct(); if (currentMode == DOG_MODE_STOP) return; //静止模式不进行后续动作 updateMode(); //切换运动模式 //计算4条腿运动位置 leg1(); leg4(); leg2(); leg3(); //更新所有舵机位置 Tlc.update(); //检测红外传感器信息 updateIR(); } //串口与陀螺仪通信 void serialEvent() { readGyroSerial(); } 审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器狗
+关注
关注
3文章
194浏览量
11069
发布评论请先 登录
相关推荐
热点推荐
通过肩部动作操控机器人
在6月6日举行的2018年以色列教育科技峰会上,特拉维夫大学学生展示人机接口研发进展。学生通过肩部动作操控桌上的机器人举手、行走和转向。相关仪器通过学生身上传感器,不仅能将肢体动作信号
发表于 11-09 16:01
ANYmal机器人具有腿和脚,可跨越障碍物
ANYmal机器人的实验版本具有腿和脚,苏黎世联邦理工学院步行,有腿的机器人可能擅长于越过障碍物,但车轮在光滑地面上行驶仍然更有效率。这就是苏黎世联邦理工学院的工程师向其现有的ANYm
发表于 08-30 08:02
波士顿机器狗电机控制相关资料推荐
开始接触到像波士顿机器狗这样的项目一只狗12个电机4条腿每个腿上3个1个是控制胯转动1个控制大腿也就是整条腿动的1个是控制小腿打弯的主控用l
发表于 09-03 06:25
一只完全由PCB制造的智能机器狗
得不切割 PCB自己用卷轴锯(或类似工具),但这不会花费你超过几个小时。智能机器狗展示PS:在发布这个项目的时候,我没有一个好的可靠的代码可以在这个机器人上使用,所以我不会分享它,但我
发表于 07-05 06:16
小米机器狗二代来了,比上一代更瘦、更快、更强!NVIDIA主控+全志MR813+全志R329协处理器
能看、能听、能感知,CyberDog2确实如雷军所调侃的那样,它比从前“更狗了”。
在刚刚结束的秋季新品发布会上,小米发布了最新的仿生四足机器人CyberDog2,虽然没有在发布会现场进行实物展示
发表于 09-06 09:39
波士顿动力对机器狗进行了更新换代——能够感应人体动作进行模仿
如机器狗的设计与发明,就是一项大胆的创新,近期波士顿动力又搞了一个神秘的测试,这款新型机器狗进行了更新换代,不仅保留着初代机器
腿+轮式动力!瑞士四足机器人展示最佳混合步态、运动更灵活
腿+轮式动力!瑞士四足机器人ANYmal展示最佳混合步态,运动更灵活,机器人,四足机器人,步态,轮子,车轮
发表于 02-20 13:44
•3000次阅读
波士顿动力机器狗学会了“三狗一组”跳大绳
跳完集体舞、引得马斯克赞叹不已后,波士顿动力的机器狗Spot,又有了新才艺。 安装了机械臂的Spot Arm,甚至学会了“三狗一组”跳大绳: 起跳动作,对于
波士顿动力Spot机器狗获新技能:玩跳绳游戏
据外媒CNET报道,波士顿动力公司的Spot机器狗已经拥有跳舞、探索矿井及帮助医疗工作者等多项技能。而Spot机器狗正在不断学习新的技巧,现在它们有了一个机械臂和一个新的编程界面,有了
阿尔法机器狗如此受欢迎的魅力是什么
要说2021年的大事件,蔚蓝科技自主设计研发的阿尔法机器狗成功打破世界纪录。此前预售的阿尔法机器狗C系列已经陆续发货,不少用户开始“秀狗”。
发表于 03-23 16:50
•2191次阅读

瑞士苏黎世联邦理工学院新型四足机器人单腿完成开关门、移动任务
据本周五出版的Popular Science杂志报道,近日瑞士苏黎世联邦理工学院机器人系统实验室的科研团队展示了新研究进展:他们训练了自家的机器狗,让其用单



评论