 AN-2555:真双极性输入、全差分输出、ADC驱动器设计
AN-2555:真双极性输入、全差分输出、ADC驱动器设计

数据采集和通用测试和测量设备中使用的精密信号链必须适应各种输入电平。信号链可能需要提供高输入阻抗,同时支持增益和衰减,并调整共模电平,以确保信号落在ADC的适当输入范围内。图1中的原理图显示了两级信号调理,可将差分双极性±10 V信号缩放和电平转换为全差分±4.096 V信号,共模电平为ADC所需的2.048 V共模电平。设计目标是在不降低ADC噪声和失真性能的同时实现这种调理。ADC 驱动器通常 电源电压需要超过ADC的输入范围,以允许输入和输出摆幅电压裕量。驱动器通常必须调整和转换第一级输出电压,以匹配ADC的输入电压范围(或者例如,将真正的双极性差分信号更改为从地摆幅至V的差分信号)裁判).
图1中的原理图由LTspice创建,LTspice是一款高性能SPICE III仿真器、原理图捕获和波形查看器,具有增强功能和模型,可简化开关稳压器、线性和信号链电路的仿真。
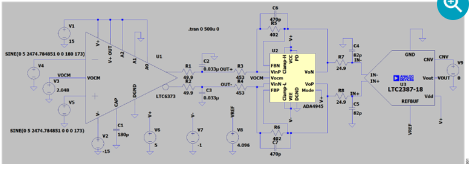
图1.双极性输入、全差分输出ADC驱动器的LTspice原理图
主要设计规格
对于±10 V的真双极性输入信号范围,表1列出了关键设计规格。对于差分±10 V峰值正弦波,该电路输出±4.096 V差分输出信号。
| 参数 | 价值 |
| 输入差分 | ±10 V |
| 输出差分 | ±4.096 V |
| 输出共模电压 (VOCM) | 2.048 伏 |
| +VS/−Vs用品 | ±15 V, +5 V/-1 V |
| 模数转换器全差分 | 18 位 |
| 参考电压 (V裁判) | 4.096 伏 |
| 输入频率范围 | 0 kHz 至 100 kHz |
| 总谐波失真 (THD) | −117分贝 |
| 单噪声比 (SNR) | 95.7分贝 |
设计说明
该电路是一种ADC驱动器电路,具有非常高的输入阻抗,可以定制以驱动宽范围的输入电压,包括单端和差分。该电路的输出信号能够以小于30 ns的采集时间驱动ADC。该电路在保持最佳噪声和失真性能的同时实现了这一目标。图1中的电路由作为输入级的LTC6373可编程增益仪表放大器和全差分放大器ADA4945-1组成。 作为第二级ADC驱动器,LTC2387-18是一款18位、15 MSPS ADC。此外,LTC100输出和ADA6373-4945输入之间有一个1 kHz滤波器以降低噪声,ADA4945-1输出和LTC2387-18输入之间有一个毛刺抑制/降噪滤波器。LTC6373配置为差分至差分放大器,增益为0.5,输出共模电压为2.048 V。ADA4945-1配置为衰减差分至差分驱动器,增益为0.8。ADA4945-1的输出共模电压为2.048 V,与LTC2387-18输入范围兼容。LTC2387-18在每个输入端的输入信号范围为0 V至4.096 V,从而产生 使用内部4.096 V基准电压源时,差分输入信号范围为±4.096 V。
设计提示
如果需要更大或更小的信号范围,则 LTC6373 的增益和 R 的比值F/RG可以更改。例如,如果需要±100 mV信号范围,则RF可以在保持 R 的同时增加G以其原始值。以下公式可用于重新计算 RF:

其中:


由于ADA4945-1的增益带宽更大,因此建议增加其增益,而不是LTC6373。
由R5、C6、R6和C7组成的滤波器降低了ADA4945-1的带宽。较低的带宽导致 LTC2387-18 输入端的噪声较低。通过逐渐增加C6和C7的值进行实验确定,直到SNR停止改善。
滤波器由电阻R7和R8以及电容C4和C5组成,有助于将ADA4945-1输出与ADC输入产生的采样毛刺(如果未缓冲)隔离开来。它限制了提供给ADC输入的信号的带宽,并有助于降低ADC输入端的噪声。
如果驱动器和ADC之间的滤波器没有时间建立,则结果是增益误差。根据应用的不同,小的增益误差可能是可以容忍的,但无法建立也会导致失真,这是必须避免的。精密ADC驱动器工具可用于检查滤波器建立并估计电路SNR和THD性能。
设计程序
初始条件和假设
LTC6373的电源设置为±15 V,ADA4945-1的电源设置为+5 V/−1 V。给定20 V p-p(±10 V)的输入范围和8.192 V p-p(进入ADC)的输出范围,模拟前端(AFE)上的总增益分布如下:

允许一些裕量来适应元件容差和共模的小变化,总增益目标设置为0.4 V/V。LTC6373 支持固定的增益值选择:{0.25, 0.5, 1, 2, ..., 16}。选择两级的增益<1允许ADA4945-1使用较小的电源范围,并降低每级的噪声增益。将LTC6373的增益设置为0.5会导致ADA0-8的增益为4945.1。
LTC6373和ADA4945-1的共模均设置为2.048 V。
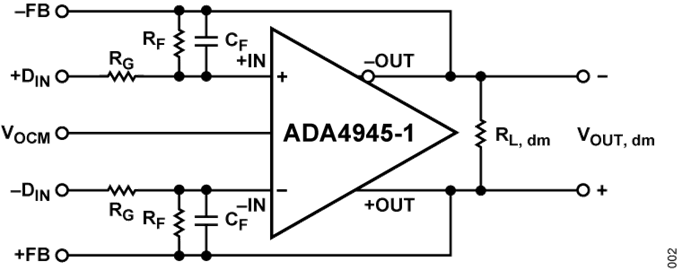
图2.ADA4945-1的电路定义
对于ADC (LTC2387-18),使用V将满标度输入设置为±4.096 V裁判= 4.096 V 和 ±V司 司长= ±4.096 V.
设置驱动放大器 (ADA4945-1) VOCM.
在OCM偏置至4.096 V/2 = 2.048 V。 根据数据手册的输出共模要求进行检查。

对于此应用程序,
其中 VOCM在允许的范围内。VOCM由 V 提供OCMLTC2387-18 的引脚。
设置输入放大器 (LTC6373) 输入和输出限值。
由于增益设置为0.5,因此输出摆幅为

输出摆幅为
对于反向信号极性,±D 的值在简单反转(0.452 V,−4.548 V)。
图3显示了 LTC6373,增益为 0.5。看着 VS= ±15 V曲线,可以看出,当输入共模电压为2.048 V且输出差分电压摆幅在±4.548 V之间时,LTC6373很容易支持此应用。但是,如果使用±5 V电源,则LTC6373可能会在其差分输出电压范围之外工作。所有LTC6373增益的共模范围与差分输出电压曲线在数据手册中提供了。
五世OCM的 LTC6373 也使用 V 设置为 2.048 VOCMLTC2387-18 的引脚,以消除产生另一个偏置点的麻烦。
按如下方式设置放大器增益:

对于此应用程序,

为获得最佳噪声,ADA4945-1数据手册建议R采用499 ΩF和 RG在单位增益设置中。在本例中,RG是 缩放至402 Ω以获得所需的增益。RG由 49.9 Ω 和 453 Ω电阻组成。如果THD比SNR更重要,则可以使用2 kΩ用于RGR为1.62 kΩFTHD 可能提高 3dB,但 SNR 为 4 dB。
设置驱动放大器(ADA4945-1)输出摆幅。
由于驱动器放大器的差分输出摆幅约为VOCM,因此当观察+VFS时,运算放大器输出为−VFS的反向电压。VREF (4.096 V)用于该范围,即使实际最大范围受电路增益限制为4 V。对于此应用,ADA4945-1输出必须能够在0.0 V至4.096 V范围内摆幅。
对于 VOUTdm=+VFS,
根据数据手册中电源轨的要求检查驱动器放大器(ADA4945-1)输出电压摆幅。
根据ADA4945-1数据手册,在1 kΩ负载下,

对于此应用程序,
设置驱动放大器(ADA4945-1)输入摆幅。
对于 VOUTdm= +V司 司长,计算输入共模电压如下:
对于 VOUTdm= −VFS,计算输入共模电压如下:
对于此应用,ADA4945-1输入必须能够在2.02 V至2.07 V范围内摆幅。
检查驱动放大器(ADA4945-1)输入共模。
根据ADA4945-1数据手册,

满足数据手册要求。
对于此应用程序,

满足申请要求。
设计模拟
精密ADC驱动器工具提供了一个专门的仿真环境,工程师可以在其中快速确定驱动放大器和R-C滤波器选择对ADC信号链整体性能的影响。
使用图4所示的精密ADC驱动器工具,可以估算建立时间、噪声和THD性能。精准 ADC 驱动器工具目前不允许将 LTC6373 添加到原理图中。因此,仅仿真驱动LTC4945-1的ADA2387-18性能。驱动器工具建议最小电源电压为+4.6 V和−0.5 V。驱动程序工具警告所选驱动程序会显著降低整体噪音性能。RF和 RG是驾驶员噪音的最大贡献者。驱动器工具不允许在 R 上添加电容器F如所示应用程序所示。电容器可降低驱动器噪声。设计目标与仿真结果的汇总如表2所示。
| 参数 | 设计目标 | 模拟 |
|
信噪比 总谐波失真 |
95.7分贝 −117分贝 |
91.9分贝 −116分贝 |
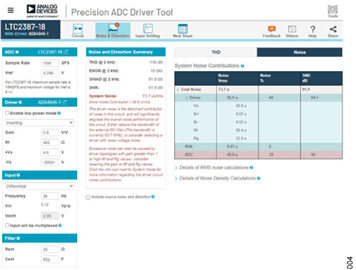
图4.精密ADC驱动器工具:噪声和THD结果
测量结果
测得的ADC SNR性能比ADA0-4数据手册典型规格−4945.1 dB低95.7 dB,THD性能比数据手册典型规格−3 dB低8.117 dB,如图5所示。
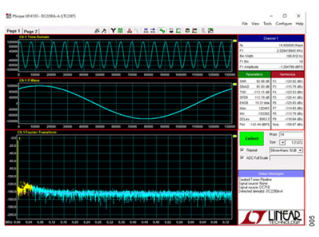
图5.图1所示电路的实测性能
设计目标与仿真结果的总结如表3所示。通过提高ADA3-4945 R,THD性能最多可提高1 dBG至 2 kΩ 和 RF至 1.62 kΩ。根据ADC驱动器工具,这种增加会导致SNR性能下降4 dB。由用户决定THD或SNR性能是否更重要。所有数据均以14 MSPS数据速率传输。在15 MSPS时,由于ADC采集周期小,THD会显著降低。
| 参数 | 设计目标 | 量过的 |
|
信噪比 总谐波失真 |
95.7分贝 −117分贝 |
95.3分贝 −113.2分贝 |
如图6所示,当输入频率高于100 kHz时,THD超过−15 dB。当输入频率高于90 kHz时,SNR低于90 dB。该数据是在25°C下拍摄的。 在较低或较高的温度下,性能可能会更早开始下降。电路处理的变化也可能导致不同的电压,性能开始下降。
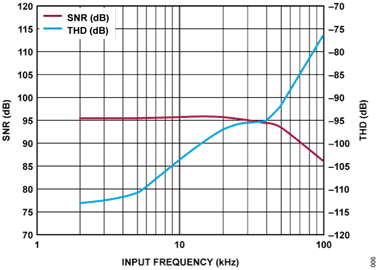
图6.信噪比和总谐波失真与输入频率的关系
设计设备
| 参数 | 价值 |
| 输入失调电压最大值 | 50 μV |
| 偏置电流最大值 | −2.5 μA |
| 增益带宽产品典型值 | 145兆赫 |
| 噪声电压典型值 | 5 nV/√赫兹 |
| 每个放大器的典型静态电流 | 180 微安 |
| 电源电压范围最小值/最大值 | 3 V/10 V |
| 参数 | 价值 |
| 输入失调电压最大值 | 464 μV |
| 偏置电流最大值 | 0.0005毫安 |
| 增益带宽产品典型值 | 7兆赫 |
| 噪声电压典型值 | 26.4 nV/√赫兹 |
| 每个放大器的典型静态电流 | 4.4毫安 |
| 电源电压范围最小值/最大值 | 9 V/36 V |
| 参数 | 价值 |
| 分辨率 | 20 位 |
| 最大采样频率 | 1 兆微安全 |
| 输入类型(单端或差分) | 全差分 |
| 在在跨度五最低/在。.MAX | 5 V |
| 信噪比典型值 | 104分贝 |
| THD 典型值 | −125分贝 |
| 数据接口 (I2C, 串行外设 接口 (SPI),并行) | SPI |
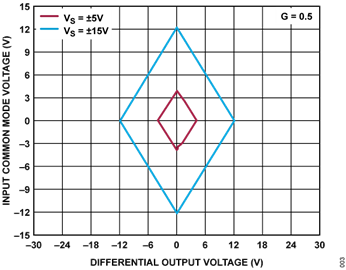
图3.输入共模范围与差分输出电压的关系
审核编辑:郭婷
-
放大器
+关注
关注
146文章
14300浏览量
221030 -
驱动器
+关注
关注
54文章
9016浏览量
153371 -
adc
+关注
关注
100文章
7407浏览量
553818
发布评论请先 登录
真双极性输入、全差分输出ADC驱动器电路设计方案

LTC2337-18:18位,500ksps,±10.24V真双极全差分输入ADC,带100dB SNR数据表

LTC2336-18:18位,250ksps,±10.24V真双极全差分输入ADC,带100dB SNR数据表
LTC2338-18:18位,1Msps,±10.24V真双极全差分输入ADC,带100dB SNR数据表

ADS921x具有全差分ADC输入驱动器的双路同步采样18位10MSPS SAR ADC数据表
ADC驱动器的理想之选:低噪声全差分运放SC7516





 工商网监
工商网监
评论