 图解大模型系列之:Megatron源码解读1,分布式环境初始化
图解大模型系列之:Megatron源码解读1,分布式环境初始化

一晃过去大半个月,终于有时间来写Megatron的源码解读篇了。
首先,请允许我介绍下封面。明明是Megatron,为什么放Bee啊?还不是因为Megatron长得太丑了。翻遍了网络全都是一坨灰加上两只红色眼睛,实在是有碍阅读心情。。。放个明黄色舒爽下眼睛。
源码阅读类的文章很难写。尤其是对Megatron这样细节丰富,代码结构上又较为松散的项目而言。思考了一下,我决定依然用自己最擅长的【图解】方式,和大家一起阅读源码。在这个系列里,我基本按以下3步骤来做解读:
- 先通过【图解】的方式,说明这块代码在做一件什么事
- 阐述代码整体架构,拆分逻辑
- 细节解读
一、CodeGeeX模型简述
使用Megatron来训练gpt类大模型的项目有很多。在这个系列里,我选择了由THUDM开发的CodeGeeX项目,它是gpt在代码生成方向上的应用,对标于openAI的CodeX。github地址在此。
为什么选择CodeGeeX呢?因为:
- 完全开源。它开源了完整的预训练代码。而很多号称开源的项目,其实只公开了预训练参数。
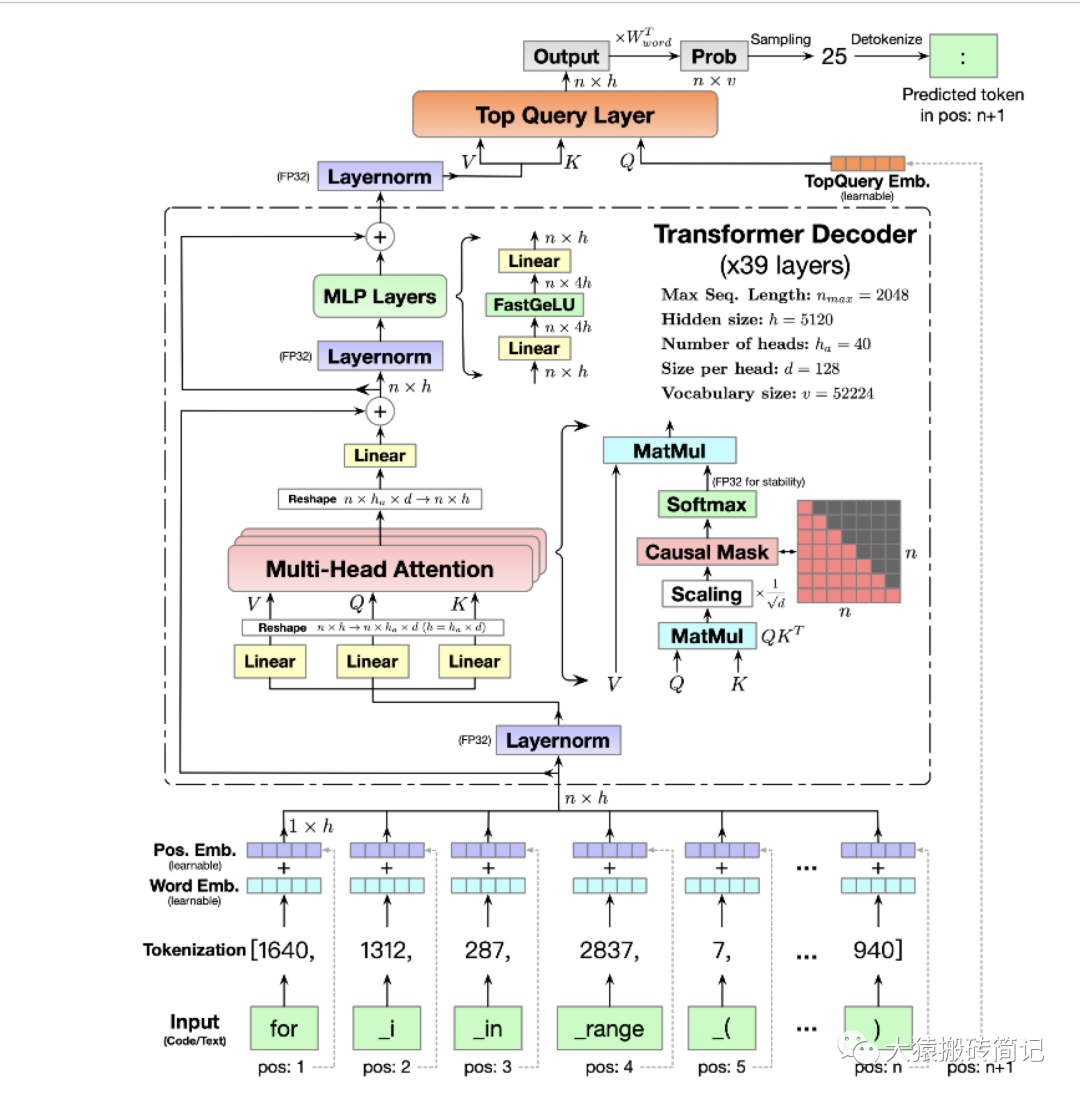
- 简洁精要的模型图。在对应论文中,用两张图就清晰描绘了整个预训练配置和模型架构(精确到混合精度和矩阵维度)。极大提升了源码阅读的效率。
下面我们就放出这两张牛皮的架构图:
模型架构
预训练配置
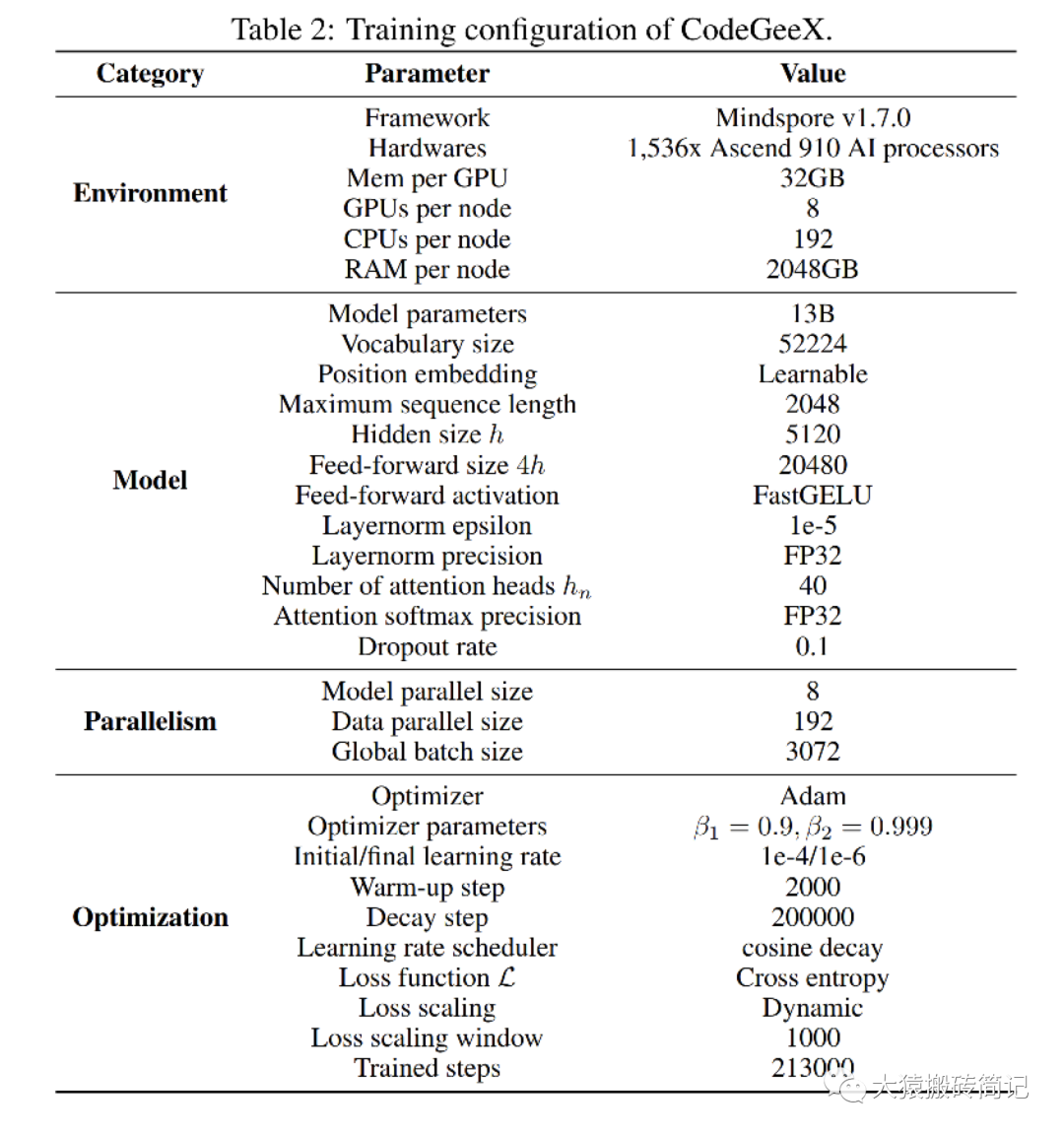
在下一篇讲解切割模型部分的源码里,我们会配合模型架构图来读。这一篇我们着重讲分布式环境初始化。因此对gpt或codegeex模型架构不熟悉的话,也不影响本文阅读。特别说明的是,根据预训练配置,我们可知codegeex采用的是8头TP,192头DP,共1536块GPU进行训练,采用的训练框架为Megatron + DeepSpeed ZeRO2。
二、预训练代码整体架构
2.1 预训练代码设计与使用规范
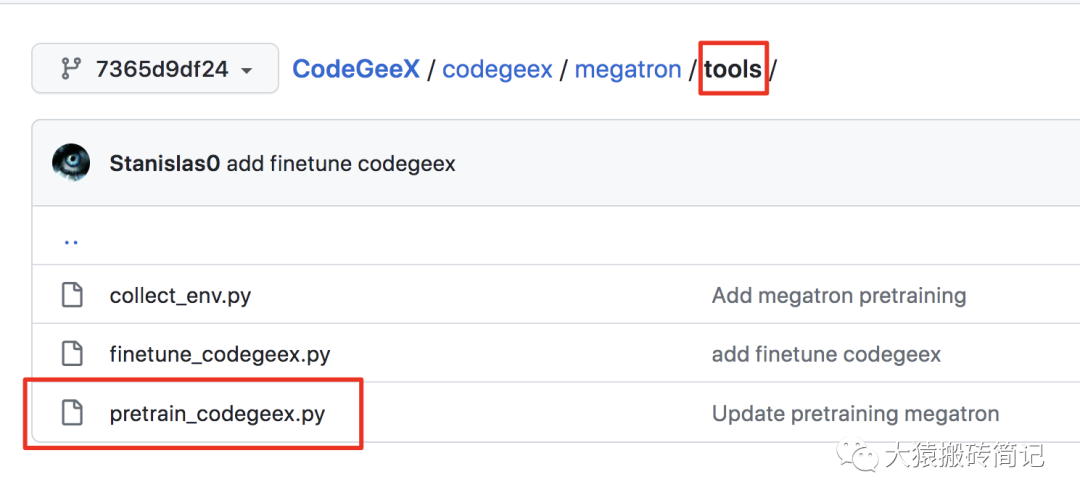
如下图:
- 预训练入口函数在megatron/tools/pretrain_codegeex.py 这个路径下
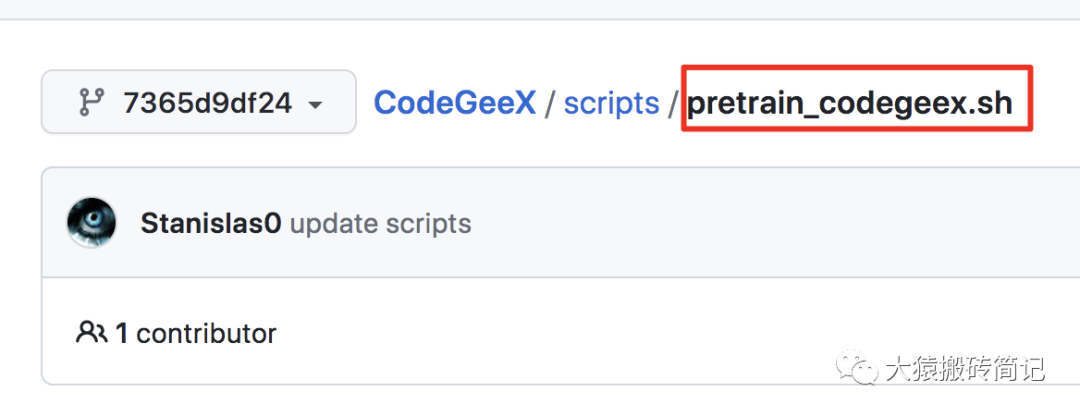
- 启动脚本在pretrain_codegeex.sh这个文件中。
使用Megatron时,一般将预训练函数命名为pretrain_模型名.py的形式,例如pretrain_bert.py、pretrain_gpt.py等。在codegeex这个项目里,该代码位于tools目录下;在NVDIA提供的代码中,则与tools目录同级。放在哪里不重要,梳理出来只是方读者查找阅读。
在pretrain_codegeex.sh这个启动脚本里,定义了模型训练的参数值,包括batch_size、hidden_size等;同时也定义了设置分布式环境的参数值,例如DP/TP/PP组的大小等。
2.2 预训练代码整体设计
在pretrain_codegeex.py中,核心入口函数为pretrain,调用它则开启预训练过程:
if__name__=="__main__":
pretrain(
train_valid_test_datasets_provider,
model_provider,
forward_step,
args_defaults={"tokenizer_type":"GPT2BPETokenizer"},
)
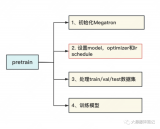
如下图,pretrain函数主要包含以下4个内容:
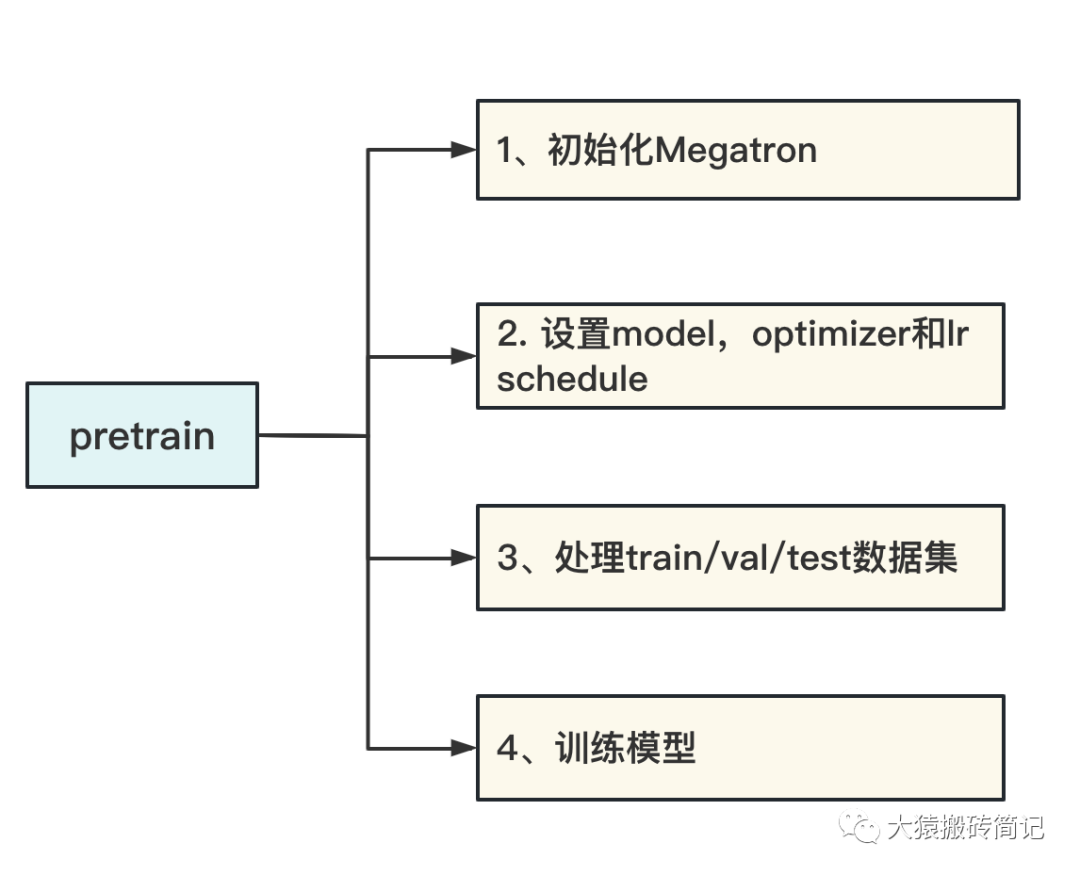
- 初始化Megatron:设置分布式训练环境。主要目的是设置DP/TP/PP进程组,并为每一个进程分配GPU。
- 设置model,optimizer和lr schedule:在CPU上定义好模型,再将其按照第1步中定义好的分布式框架,把模型切割并搬运到GPU上。
- 处理train/val/test数据集:按第1步定义好的分布式框架,对数据集进行切分。
- 训练模型:在分布式环境中定义每个step的训练方式。
Megatron源码解读系列,也按上述逻辑分成4个部分。本篇将着重介绍第一部分:初始化Megatron。
三、初始化Megatron
3.1 初始化在做一件什么事
在阅读代码之前,我们先看初始化到底在完成一件什么事。
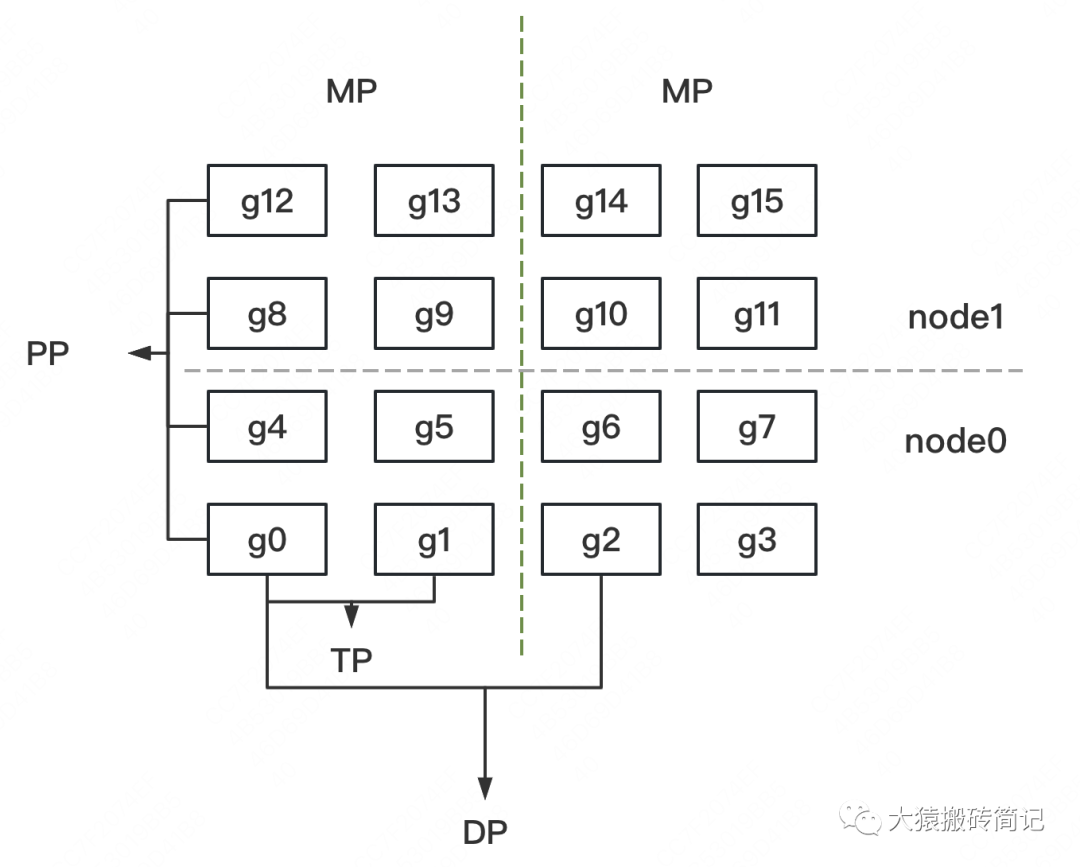
假设我们有2台机器(node0和node1),每台机器上有16块GPU,GPU的编号为0~15。
我们使用这16块GPU,做DP/TP/PP混合并行,如下图:
-
MP:模型并行组(Model Parallism)。假设一个完整的模型需要布在8块GPU上,则如图所示,我们共布了2个model replica(2个MP)。MP组为:
[[g0, g1, g4, g5, g8, g9, g12, g13], [g2, g3, g6, g7, g10, g11, g14, g15]] -
TP:张量并行组(Tensor Parallism)。对于一个模型的每一层,我们将其参数纵向切开,分别置于不同的GPU上,则图中一共有8个TP组。TP组为:
[[g0, g1], [g4, g5],[g8, g9], [g12, g13], [g2, g3], [g6, g7], [g10, g11], [g14, g15]] -
PP:流水线并行组(Pipeline Parallism)。对于一个模型,我们将其每一层都放置于不同的GPU上,则图中一共有4个PP组。PP组为:
[[g0, g4, g8, g12], [g1, g5, g9, g13], [g2, g6, g10, g14], [g3, g7, g11, g15]] -
DP:数据并行组(Data Parallism)。经过上述切割,对维护有相同模型部分的GPU,我们就可以做数据并行,则图中共有8个DP组。DP组为
[[g0, g2], [g1, g3], [g4, g6], [g5, g7], [g8, g10], [g9, g11], [g12, g14], [g13, g15]]
明确了分组设计,我们再来看下面几个问题。
(1)分组的原则是什么?
- MP设定原则:MP其实由TP+PP共同决定。在开始训练前,需要我们根据实际模型,预估训练时显存消耗(特别注意峰值显存),来为模型安排GPU资源。
- TP、DP和PP设定原则:在这三种并行模式的原理篇中,我们分析过三者的通讯量。一般而言,TP>DP>PP。通讯量大的尽量放入一台机器内,因为机器内带宽高。所以在图例中,TP和DP不跨机,PP跨机。再提一点,在使用Megatron时,很多项目是不用PP,仅用TP+DP的,此时一般将TP放入一台机器内,令DP跨机(比如codegeex)
(2)分组的目的是什么?
-
分配进程:
- 确认分组方案后,在每块GPU上启动一个进程(process),每个进程独立执行自己所维护的那部分模型的计算,实现并行训练。
- 进程0~15,为一个进程大组(group),其下的每一个DP/MP/PP组,为一个进程子组(subgroup)
- 组间通讯:确认好DP/TP/PP组,并分配好进程后,我们就能进一步设置不同进程间的通讯方案。例如属于一个DP组的g0和g2需要进行梯度通讯,属于一个PP组的g4和g8需要进行层间输出结果的通讯。
总结来说,初始化Megatron做了如下事:
- 定义模型的切割框架
- 在此框架上,初始化进程,分配GPU,设置进程组(DP/TP/PP)
3.2 代码整体解读
明确了初始化代码要做的事情,现在可以来看代码实现了。
回pretrain函数,它的第一行就通过initialize_megatron执行了分布式初始化:
defpretrain(
train_valid_test_dataset_provider,
model_provider,
forward_step_func,
valid_forward_step_func=None,
extra_args_provider=None,
args_defaults={},
):
initialize_megatron(
extra_args_provider=extra_args_provider,args_defaults=args_defaults
)
...
initialize_megatron 函数位于megatron/initialize.py 文件中,我们直接来看它的核心函数_initialize_distributed。代码如下:
def_initialize_distributed():
"""Initializetorch.distributedandmpu.
|Node1|Node2|
____________|p1|p2|p3|p4|
local_rank|0|1|0|1|
rank|0|1|2|3|
node:物理结点,1台机器或者1个容器。图中2个物理结点
rank:进程在全局上的序号。图中4个进程
local_rank:进程在node上的序号。
torch.cuda.device_count():当前进程所在的node上可使用的GPU的数量
device:GPU在某个node上的编号
该函数作用:
1、设置分布式环境:初始化进程,分配GPU,并设置进程大组(group)
2、制定DP/TP/PP分组策略,设置进程子组(subgroup)
3、设置DeepSpeedZeRO-R,对activation进行优化
"""
args=get_args()
device_count=torch.cuda.device_count()#当前进程所在的node上可使用的GPU的数量
iftorch.distributed.is_initialized():#如果已创建好分布式环境
ifargs.rank==0:#在0号进程上打印出“创建完毕”的日志
print(
"torchdistributedisalreadyinitialized,"
"skippinginitialization...",
flush=True,
)
args.rank=torch.distributed.get_rank()#取得当前进程的全局序号
args.world_size=torch.distributed.get_world_size()#取得全局进程的个数
else:#如果未创建好分布式环境
ifargs.rank==0:
print(">initializingtorchdistributed...",flush=True)
#1.初始化进程,分配GPU,并设置进程大组(group)
ifdevice_count>0:
device=args.rank%device_count# 1块进程1个GPU。device为GPU编号。例如图例中的进程9,其所在机器上有8块卡。因此进程9使用的gpu编号为8%9=1
ifargs.local_rankisnotNone:
assert(
args.local_rank==device
),"expectedlocal-ranktobethesameasrank%device-count."
else:
args.local_rank=device
ifargs.force_deviceisnotNone:
print(
f">forcefullysetthedeviceto{args.force_device},originally{device}"
)
device=args.force_device
torch.cuda.set_device(device)#为当前进程分配GPU
#设置进程大组
init_method="tcp://"
master_ip=os.getenv("MASTER_ADDR","localhost")#获取rank=0进程的ip
master_port=os.getenv("MASTER_PORT","6000")#获取rank=0进程的端口
init_method+=master_ip+":"+master_port
print(
f">(rank={args.rank})initializingprocessgroup:"
f"world_size={args.world_size}"
f"backend={args.distributed_backend}"
f"init_method={init_method}",
flush=True,
)
timeout=datetime.timedelta(minutes=args.dist_timeout)
torch.distributed.init_process_group(
backend=args.distributed_backend,
world_size=args.world_size,
rank=args.rank,
init_method=init_method,
timeout=timeout
)
print(f">(rank={args.rank})processgroupinitialized")
#2、制定DP/TP/PP分组策略,设置进程子组(subgroup)
ifdevice_count>0:
ifmpu.model_parallel_is_initialized():
print("modelparallelisalreadyinitialized")
else:
mpu.initialize_model_parallel(#megatron/mpu/initialize.py
args.tensor_model_parallel_size,
args.pipeline_model_parallel_size,
args.virtual_pipeline_model_parallel_size,
)
#设置DeepSpeedZeRO-R,对activation进行优化
ifargs.deepspeedandargs.deepspeed_activation_checkpointing:
setup_deepspeed_random_and_activation_checkpointing(args)
总体来说,这个代码实现了3个目的:
- 设置分布式环境:初始化进程,分配GPU,并设置进程大组(group)。也即例子中的0~15号进程同属一个分布式进程大组
- 制定DP/TP/PP分组策略,设置进程子组(subgroup)
- 设置DeepSpeed ZeRO-R,对activation进行优化
我们来逐一讲解。
3.3 代码细节:torch.distributed,设置分布式环境
设置进程大组的目的是告知程序,从全局上看,有哪些进程共同组成了分布式训练系统。我们先明确几个术语:
|Node1|Node2|
____________|p1|p2|p3|p4|
local_rank|0|1|0|1|
rank|0|1|2|3|
node:物理结点,1台机器或者1个容器。图中2个物理结点
rank:进程在全局上的序号。图中4个进程
local_rank:进程在node上的序号。
torch.cuda.device_count():当前进程所在的node上可使用的GPU的数量
device:GPU在某个node上的编号
特别说明,在2.2的图例中,我们用g0~g15表示GPU编号,但更准确地应理解为进程编号。GPU的编号与local_rank一样,是相对于node而言的,即0~8,0~8。
我们借助torch.distributed 来实现这一步,它是pytorch用于设置分布式训练环境的偏底层API(distributed communication package)。如果你看过pytorch的文档,可能会发现对于该API的阐述比较抽象。所以我把它单独拎出来做说明。
init_method="tcp://"
master_ip=os.getenv("MASTER_ADDR","localhost")#获取rank=0进程的ip
master_port=os.getenv("MASTER_PORT","6000")#获取rank=0进程的端口
init_method+=master_ip+":"+master_port
print(
f">(rank={args.rank})initializingprocessgroup:"
f"world_size={args.world_size}"
f"backend={args.distributed_backend}"
f"init_method={init_method}",
flush=True,
)
timeout=datetime.timedelta(minutes=args.dist_timeout)
torch.distributed.init_process_group(
backend=args.distributed_backend,
world_size=args.world_size,
rank=args.rank,
init_method=init_method,
timeout=timeout
)
print(f">(rank={args.rank})processgroupinitialized")
我们聚焦于torch.distributed.init_process_group,该函数实现了设置进程大组(group)的功能,它主要由以下几个概念组成:
-
backend:直译为后端。但本质上是在定义IPC通信机制(对数据实现reduce, gather, broadcase等通信操作)。取值有
gloo,nccl等。粗暴来说,使用CPU时,用gloo;使用GPU时,用nccl。 - world_size:全局进程数。例如图例中的world_size = 16。
- rank:当前进程在全局上的序号。例如图例中进程序号的取值范围0~15,我们需要对每个进程操作init_process_group,将其纳入进程大组中。
- init_method:这个概念较难理解,官方文档也写得比较抽象。通俗来说,这个参数指明了一个地址,进程组内的进程通过该地址中存放的信息进行交流。这些信息包括:哪些进程间应该相互通讯;各进程的计算进度如何等。还是以图例说明,g1和g3属于一个DP组,当它们把各自梯度算完后,需要对梯度做AllReduce。g1算完自己的梯度后,它就会去这个地址下,声明自己已算完,并去查找自己应该和谁通讯,通讯方是否已算完等信息。借助这个地址中存储的信息,进程组内的进程就能相互知道彼此状态,并联系彼此。一般来说,为避免冗余,这个信息只存一份,存在rank 0 进程上(rank 0进程又称为master进程)。
- store:默认值为None。它的作用和init_method一样,只不过init_method指定的是一个地址,指定后在该地址下创建存储交流信息的数据对象,这个数据对象就是store。也就是说,store显式地指明了交流信息的内容。因此store和init_method是互斥的,即store非空时,会忽略init_method。
- timeout:设置每个进程等待的时间。进程间的计算速度不一样,还是以DP组的g1和g3为例,可能g1都算完梯度了,g3还在执行forward。在等待g3算梯度的过程中,g1可能会timeout。因此这个参数就用于设置每个进程的最大等待时间。
现在回头再看这个代码片段,是不是好理解很多~torch.distributed.init_process_group 非常重要,它贯穿了Megatron,也是使用pytorch做分布式训练不可略过的一环。关于torch.distributed的更多信息,推荐大家阅读官方文档,以及这篇blog。
3.4 代码细节:设置DP/TP/PP组
设置完进程大组(group)后,我们就可以进一步设置进程子组(subgroup)了,也即设置DP/TP/PP组。
mpu.initialize_model_parallel(#megatron/mpu/initialize.py
args.tensor_model_parallel_size,
args.pipeline_model_parallel_size,
args.virtual_pipeline_model_parallel_size,
)
核心函数initialize_model_parallel 在megatron/mpu/initialize.py 下。mpu的含义是model parallisim utils,也就是和模型并行设置相关的函数,都放在这个目录下,它接收3个参数:
- tensor_model_parallel_size:每个TP组的进程数量。例如图例中是2
- pipeline_model_parallel_size:每个PP组的进程数量。例如图例中是4
- virtual_pipeline_model_parallel_size:每个virtual PP组的进程数量。这是NVIDIA对Megatron做后续迭代时提出的一种优化方法。我们之后会单独开一篇文章来讲解。这里可暂时忽略(不是必须参数,可以传None值)。
你可能会问,为什么不设置DP相关的size?回想2.2中设计分布式的过程,我们根据TP+PP就可确认MP,进而推出DP。也就是定好了TP和PP,DP_size就能根据 world_size // (TP_size * PP_size)计算得出。因此不用定义。
我们来看具体代码:
definitialize_model_parallel(
tensor_model_parallel_size_=1,
pipeline_model_parallel_size_=1,
virtual_pipeline_model_parallel_size_=None,
):
"""
Initializemodeldataparallelgroups.
Arguments:
tensor_model_parallel_size:numberofGPUsusedtoparallelizemodeltensor.
pipeline_model_parallel_size:numberofGPUsusedtoparallelizemodelpipeline.
Let'ssaywehaveatotalof16GPUsdenotedbyg0...g15andwe
use2GPUstoparallelizethemodeltensor,and4GPUstoparallelize
themodelpipeline.Thepresentfunctionwill
create8tensormodel-parallelgroups,4pipelinemodel-parallelgroups
and8data-parallelgroupsas:
8data_parallelgroups:
[g0,g2],[g1,g3],[g4,g6],[g5,g7],[g8,g10],[g9,g11],[g12,g14],[g13,g15]
8tensormodel-parallelgroups:
[g0,g1],[g2,g3],[g4,g5],[g6,g7],[g8,g9],[g10,g11],[g12,g13],[g14,g15]
4pipelinemodel-parallelgroups:
[g0,g4,g8,g12],[g1,g5,g9,g13],[g2,g6,g10,g14],[g3,g7,g11,g15]
2model-parallelgroup:
[g0,g1,g4,g5,g8,g9,g12,g13],[g2,g3,g6,g7,g10,g8,g14,g15]
Notethatforefficiency,thecallershouldmakesureadjacentranks
areonthesameDGXbox.Forexampleifweareusing2DGX-1boxes
withatotalof16GPUs,rank0to7belongtothefirstboxand
ranks8to15belongtothesecondbox.
"""
iftorch.distributed.get_rank()==0:
print(
">initializingtensormodelparallelwithsize{}".format(
tensor_model_parallel_size_
)
)
print(
">initializingpipelinemodelparallelwithsize{}".format(
pipeline_model_parallel_size_
)
)
#Getworldsizeandrank.Ensuresomeconsistencies.
asserttorch.distributed.is_initialized()#确保torch已经做了分布式初始化
world_size=torch.distributed.get_world_size()#得到全局进程的总数
tensor_model_parallel_size=min(tensor_model_parallel_size_,world_size)
pipeline_model_parallel_size=min(pipeline_model_parallel_size_,world_size)
ensure_divisibility(#后者表示一个完整模型所占的gpu数,我们要保证前者能被后者整除
world_size,tensor_model_parallel_size*pipeline_model_parallel_size
)
#在codegeex中,TP_size=8,PP_size=1,world_size=1536,因此DP_size是1536/(8*1)=192
data_parallel_size=world_size//(#根据TP_size和PP_size,求出DP_size
tensor_model_parallel_size*pipeline_model_parallel_size
)
num_tensor_model_parallel_groups=world_size//tensor_model_parallel_size#TP的组数
num_pipeline_model_parallel_groups=world_size//pipeline_model_parallel_size#PP的组数
num_data_parallel_groups=world_size//data_parallel_size#DP的组数
ifvirtual_pipeline_model_parallel_size_isnotNone:
global_VIRTUAL_PIPELINE_MODEL_PARALLEL_RANK
global_VIRTUAL_PIPELINE_MODEL_PARALLEL_WORLD_SIZE
_VIRTUAL_PIPELINE_MODEL_PARALLEL_RANK=0
_VIRTUAL_PIPELINE_MODEL_PARALLEL_WORLD_SIZE=(
virtual_pipeline_model_parallel_size_
)
rank=torch.distributed.get_rank()#获取当前进程的全局rank
#Buildthedata-parallelgroups.(设置DP组)
global_DATA_PARALLEL_GROUP#保存DP组,如[[0,2],[1,3]...],数字表示进进程的全局序号
assert_DATA_PARALLEL_GROUPisNone,"dataparallelgroupisalreadyinitialized"
all_data_parallel_group_ranks=[]
foriinrange(pipeline_model_parallel_size):
start_rank=i*num_pipeline_model_parallel_groups
end_rank=(i+1)*num_pipeline_model_parallel_groups
forjinrange(tensor_model_parallel_size):
ranks=range(start_rank+j,end_rank,tensor_model_parallel_size)
all_data_parallel_group_ranks.append(list(ranks))
group=torch.distributed.new_group(ranks)#设置DP组
ifrankinranks:
_DATA_PARALLEL_GROUP=group
#Buildthemodel-parallelgroups.(设置MP组)
global_MODEL_PARALLEL_GROUP#保存MP组
assert_MODEL_PARALLEL_GROUPisNone,"modelparallelgroupisalreadyinitialized"
foriinrange(data_parallel_size):
ranks=[
data_parallel_group_ranks[i]
fordata_parallel_group_ranksinall_data_parallel_group_ranks
]
group=torch.distributed.new_group(ranks)#设置MP组
ifrankinranks:
_MODEL_PARALLEL_GROUP=group
#Buildthetensormodel-parallelgroups.(设置TP组)
global_TENSOR_MODEL_PARALLEL_GROUP#保存TP组
assert(
_TENSOR_MODEL_PARALLEL_GROUPisNone
),"tensormodelparallelgroupisalreadyinitialized"
foriinrange(num_tensor_model_parallel_groups):
ranks=range(
i*tensor_model_parallel_size,(i+1)*tensor_model_parallel_size
)
group=torch.distributed.new_group(ranks)#设置TP组
ifrankinranks:
_TENSOR_MODEL_PARALLEL_GROUP=group
#Buildthepipelinemodel-parallelgroupsandembeddinggroups
#(firstandlastrankineachpipelinemodel-parallelgroup).(设置PP组与embedding组)
global_PIPELINE_MODEL_PARALLEL_GROUP#设置PP组
global_PIPELINE_GLOBAL_RANKS
assert(
_PIPELINE_MODEL_PARALLEL_GROUPisNone
),"pipelinemodelparallelgroupisalreadyinitialized"
global_EMBEDDING_GROUP
assert_EMBEDDING_GROUPisNone,"embeddinggroupisalreadyinitialized"
foriinrange(num_pipeline_model_parallel_groups):
ranks=range(i,world_size,num_pipeline_model_parallel_groups)
group=torch.distributed.new_group(ranks)#设置PP组
ifrankinranks:
_PIPELINE_MODEL_PARALLEL_GROUP=group
_PIPELINE_GLOBAL_RANKS=ranks
#Setupembeddinggroup(toexchangegradientsbetween
#firstandlaststages).
iflen(ranks)>1:
embedding_ranks=[ranks[0],ranks[-1]]
else:
embedding_ranks=ranks
group=torch.distributed.new_group(embedding_ranks)#设置embedding组
ifrankinembedding_ranks:
_EMBEDDING_GROUP=group
总结来说,我们采用torch.distributed.new_group(ranks)在进程大组下设置子组。ranks是list of list,表示对进程序号的划分,例如设置DP组,则ranks为[[0,2], [1,3]...],以此类推。我们将划分结果存在全局变量中(例如_DATA_PARALLEL_GROUP),方便我们在后续切割模型时使用。
同时,我们定义以下函数,使得对于任意一个进程,我们都能查到它在DP/TP/PP组中的局部序号(local_rank),以及它对应的DP/TP/PP组的world_size。这也是为后续切割模型使用:
#这里展示和TP组相关的查询操作。其余组也是类推。详细代码一样都在megatron/mpu/initialize.py中
defget_tensor_model_parallel_group():
"""Getthetensormodelparallelgroupthecallerrankbelongsto."""
assert(
_TENSOR_MODEL_PARALLEL_GROUPisnotNone
),"intra_layer_modelparallelgroupisnotinitialized"
return_TENSOR_MODEL_PARALLEL_GROUP
defset_tensor_model_parallel_world_size(world_size):
"""Setthetensormodelparallelsize"""
global_MPU_TENSOR_MODEL_PARALLEL_WORLD_SIZE
_MPU_TENSOR_MODEL_PARALLEL_WORLD_SIZE=world_size
defget_tensor_model_parallel_rank():
"""Returnmyrankforthetensormodelparallelgroup.
my_rank指的就是local_rank,例如[g2, g3]这一个TP组,rank为2,3;local_rank为0,1
"""
global_MPU_TENSOR_MODEL_PARALLEL_RANK
if_MPU_TENSOR_MODEL_PARALLEL_RANKisnotNone:
return_MPU_TENSOR_MODEL_PARALLEL_RANK
returntorch.distributed.get_rank(group=get_tensor_model_parallel_group())
最后,你可能想问,为什么还有一个embedding_group?
在GPT类模型中,输入层和输出层共享一个word_embedding(可参见第一部分中codegeex的架构图)。因此,在计算完梯度,更新embedding权重前,输入和输出层需要进行通讯,保证word_embedding完全一致。也即PP组中的第一个和最后一个进程需要通讯。我们知道设置进程子组的目的就是进一步划分通讯组,因此这里再添加一个embedding_group。
3.5 代码细节:DeepSpeed ZeRO-R
到目前为止,对于初始化,我们设置了全局的分布式,完成了进程大组的设置;同时根据DP/TP/PP设计划分了进程子组。NVIDIA Megatron初始化部分的代码,其实已经结束了。
但是,在实际应用中,通常采用DeepSpeed-Megatron的方式,借助微软DeepSpeed库,通过ZeRO技术,帮助我们更好节省显存。例如codegeex就采用了ZeRO2 + Megatron的方式进行训练。
总结来说,在Megatron中使用ZeRO的方法很简单,按照这篇官方教程,秉持着万物皆可wrap的原则,在原始代码特定的几个位置,把DeepSpeed提供的API包进去,就能帮我们在训练中管理显存了。使用ZeRO-R,对activation做显存管理,是一个可选项。当activation大小成为显存瓶颈时,可以按照教程指导,在初始化Megatron的代码里引入这部分优化:
#设置ZeRO-R
ifargs.deepspeedandargs.deepspeed_activation_checkpointing:
setup_deepspeed_random_and_activation_checkpointing(args)
那么ZeRO-R是怎么对显存优化起作用的呢?
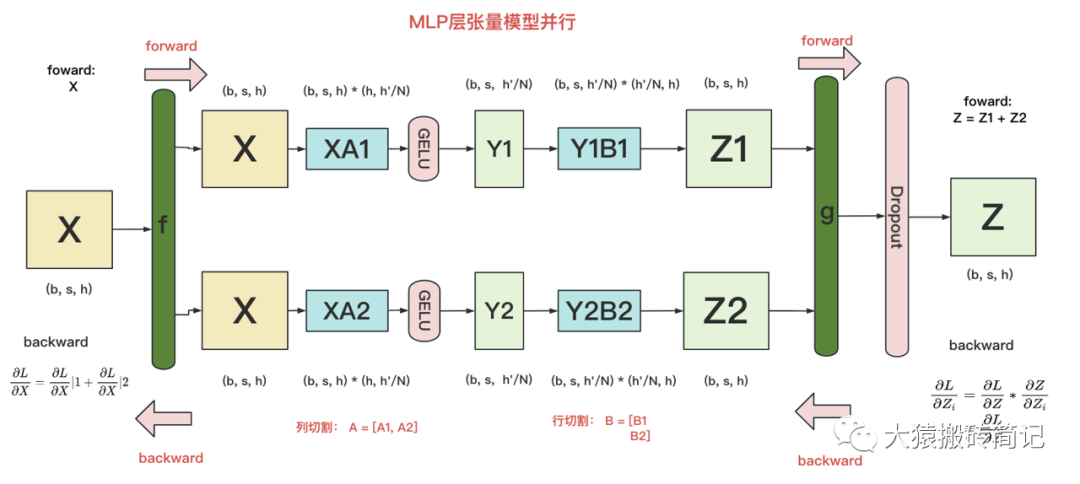
与ZeRO1,ZeRO2和ZeRO3是在DP组中做显存优化不同,ZeRO-R是在TP组中特别针对activation做显存优化。回想一下,在DP组里输入数据X各不相同,对应的activation也不相同。这时对activation做切割是没意义的。只有在输入X相同的情况下,才有意义对activation进行不用时切割存储,用时再gather回来的操作。
回顾Megatron每一层的计算,在TP组中,各GPU上的模型部分计算完毕后,需要经过一次AllReduce将聚合后的结果取回,然后才能进行下一层计算。此时,不同的GPU都拥有了同一个输入X,也意味着在后续计算中会产生相同的activation,这时我们就能通过ZeRO-R来避免冗余了。如下图,提供了TP下transfomer MLP层的计算:
关于初始化Megatron,就讲解到这了,本文列举了核心代码,各位读者可去官方github上,阅读更多细节。在下一篇里,我们将进入预训练的第二部分:模型切割,这也是整个Megatron的核心。这部分代码细节较多,代码架构上也比较分散,我依然会通过图解+细节解读的模式,和大家一起阅读~
-
gpu
+关注
关注
28文章
5321浏览量
136206 -
源码
+关注
关注
8文章
689浏览量
31558 -
大模型
+关注
关注
2文章
3862浏览量
5295
原文标题:图解大模型系列之:Megatron源码解读1,分布式环境初始化
文章出处:【微信号:GiantPandaCV,微信公众号:GiantPandaCV】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
AI Ceph 分布式存储教程资料大模型学习资料2026
如何基于分布式软总线进行“三步走”极简开发
HarmonyOS教程—分布式运动健康应用(智能穿戴端)
HarmonyOS分布式应用框架深入解读
分布式电源的相关资料推荐
【开发样例】OpenHarmony分布式购物车
分布式对象调试中的事件模型
LINUX系统引导和初始化-LINUX内核解读
objc源码中NSObject如何进行初始化
stm32初始化流程图解析
探究超大Transformer语言模型的分布式训练框架

图解大模型训练之:Megatron源码解读2,模型并行
基于PyTorch的模型并行分布式训练Megatron解析




评论