 DRIVE Labs“常学常新”系列「终点站」:寻找车位与自动泊车
DRIVE Labs“常学常新”系列「终点站」:寻找车位与自动泊车

DRIVE Labs 系列文章
终点站:寻找车位与自动泊车
|
始 发 站 | 自 动 驾 驶 基 础 功 能 |
第 二 站 | 基 本 路 况 感 知 |
第 三 站 | 读 懂 交 通 标 志 与 信 号 灯 |
第 四 站 | 监 控 车 外 的 风 吹 草 动 |
第 五 站 | 提 高 道 路 状 况 的 可 见 性 |
第 六 站 | 基 于 洞 察 的 智 能 规 划 |
第 七 站 | 为 驾 乘 人 员 的 安 全 保 驾 护 航 |
终 点 站 | 寻 找 车 位 与 自 动 泊 车 |
自动驾驶汽车穿梭过大街小巷,平安经过了各类型的路口,即将到达终点。但随着近年来汽车数量的增加,城市停车场压力逐渐增大,能否找到合适的停车位并安全驶入也对自动驾驶汽车提出了更高要求。DRIVE Labs“常学常新”系列是 NVIDIA DRIVE 团队推出的、以一辆自动驾驶汽车从出发到最终目的地为线索的系列文章,共分 8 期主题,将为大家详细解析自动驾驶汽车如何一路“过关斩将”,以及 NVIDIA 技术与产品在不同场景中提供的支持,以便读者能更好地了解自动驾驶。
本期是第八期“寻找车位与自动泊车”,将为大家介绍自动驾驶汽车如何通过深度神经网络(DNN)和 AI 来“寻找”合适的停车位并实现自动泊车,帮助自动驾驶汽车安全、高效地完成自动驾驶旅程的最后一项任务。
上期文章主要介绍了可保护车辆不受碰撞的安全力场(Safety Force Field,SFF)、可守护驾驶员专注前方道路以实现安全行驶的 AI 软件,以及能够优化夜间行人检测的主动学习方法,本期将为大家介绍可用于识别停车位的 ParkNet DNN 以及可用于提升自动泊车功能的停车标志辅助功能。话不多说,一起来看看吧!
自动驾驶克服了道路上的重重挑战后,来到了驾驶旅程的最终一段—泊车。随着汽车数量的增加和城市建设的限制,寻找合适的车位逐渐成为驾驶员的一大难点。NVIDIA 引入了 AI 和 DNN 以帮助自动驾驶汽车提高车位寻找能力并提升自动泊车的安全与效率水平。
ParkNet DNN 助力“寻找”开放停车位
在寻找停车位?AI 可以提供帮助
任何一个曾经在繁忙的停车场或者拥堵街区绕过圈的人都知道,寻找一个可用的停车位有的时候会很艰难。停车线标记不清、由于视野原因而难以判断车位是否空闲以及与其他正在寻找停车位的人共同“竞争”,都会给自动驾驶汽车带来考验。
为了在这些环境中停车,自动驾驶汽车需要一个视觉感知系统,以在各种条件下检测可用的停车位以及不同形状的停车位。NVIDIA 利用在各种条件下收集的摄像头图像数据,借助 ParkNet DNN 进行深度神经网络处理,来帮助自动驾驶汽车感知可用停车位(如以上视频所示)。
ParkNet DNN 可以在各种条件下检测开放的停车位。现实中的停车位并非都是完美的矩形,它们可能是倾斜带有一定角度的四边形,也可能是垂直或平行的状态,为了解决停车位形状和朝向的几何多样性,NVIDIA 训练 ParkNet DNN 以四边形为标准来识别停车位,包括直角四边形(也就是长方形)、任意角度的四边形等,以赋能自动驾驶汽车感知不同朝向的停车位。
ParkNet DNN 还能分辨停车位的“入口线”,即帮助自动驾驶汽车了解应该从多边形的哪条线进入停车位并停车,以为后续自主泊车提供准确的信息。此外,ParkNet DNN 还能通过五个摄像头环绕感知装置来区分可用停车位和已被其他车辆占用的停车位。
借助 ParkNet DNN 通过五个环绕摄像头感知装置来进行停车位的感知。红线表示四边形停车位的形状检测。绿线表示被定义为停车位入口线的那一侧
自动驾驶汽车还可将通过 ParkNet DNN 获取的 2D 感知结果转化为 3D 坐标以用于下一阶段 — 自主泊车,以实现精确位置预估。
左图:2D 图像形式的 ParkNet 检测和分类结果
右图:将 ParkNet 检测和分类结果转换为 3D 坐标,并以俯视的视角进行可视化呈现
停车标志辅助功能助力优化自动代客泊车
使用停车标志辅助功能提升自动代客泊车功能
自动泊车涉及一系列复杂的感知和决策算法,传统上依赖高精地图来检索停车信息。然而,地图覆盖率和较差或过时的本地化信息可能会限制此类系统。同时除了像物理标志这样的明确线索外,现实中还存在着许多携带停车信息的隐含标志,这也会对自动停车系统带来识别压力。除此之外,系统还必须理解和解释不同地区的停车规则。
因此,对自动驾驶汽车而言,配备能够帮助其了解停车规则的复杂性并做出相应反应的停车标志辅助(PSA)系统则显得尤为重要。以上视频就为大家展示了 NVIDIA DRIVE AV 软件堆栈如何利用最先进的 DNN 和计算机视觉算法来提高真实场景中自动停车的覆盖率和鲁棒性,以改善现实场景中的自动泊车。
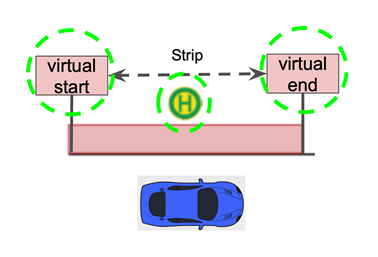
NVIDIA DRIVE AV 软件堆栈首先利用 WaitNet DNN、wait perception 堆栈以及 SignNet DNN 等技术实时检测、跟踪和分类各种停车交通标志和道路交叉口。而后,将这些感知结果输入 PSA 系统,PSA 系统接收到检测到的停车标志和道路交叉口后,会将对象抽象为一个“启动停车标志”或“终点停车标志”,并形成停车带:
-
启动停车标志体现了新停车带的潜在起点
-
终点停车标志表示一个或多个现有停车带的终止位置
形成停车带
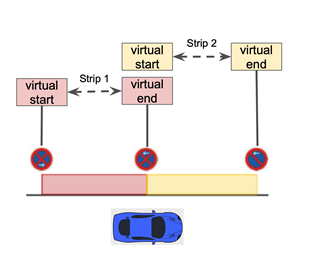
上图显示了 PSA 系统如何将标志和道路交叉口抽象为停车带。该图显示,单个标志可以生成多个虚拟标志。例如,中间的符号作为最左边符号的“结束”符号,作为最右边符号的“开始”。此外,PSA 系统还可以利用交通标志的语义将停车带分为禁止停车、禁止停留、允许停车和未知状态(如下图所示)。
禁止停车区旁的汽车
下图展示了 PSA 系统的主要功能工作流。在帧 A 中,PSA 系统能检测到“停车区开始”标志,并创建新的停车带。汽车行驶一段时间后,能检测到“停车区结束”标志,该标志与该停车带的开始标志相匹配。最后,PSA 系统将所有激活的停车带存储在其存储器中,并根据停车带所隐含的交通规则向驾驶员发出当前停车状态的信号。
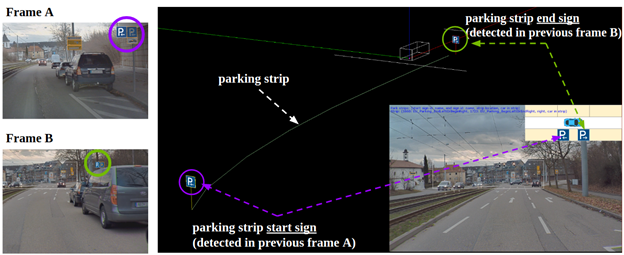
PSA 的高水平工作
基于 NVIDIA DRIVE AGX 运行的 PSA 系统仅需几毫秒,就能够以惊人的准确性实现复杂的决策,以帮助自动驾驶汽车提升自动泊车功能。
以上就是本期全部内容。本次的自动驾驶之旅到这里就暂告一段落了,该系列文章是以一辆自动驾驶汽车的出行为导引,为大家介绍了 NVIDIA 在自动驾驶各场景中所提供的解决方案与技术支持,希望大家喜欢!欢迎大家点击“阅读原文”,观看更多 NVIDIA DRIVE Labs & Dispatch 视频,持续关注 NVIDIA 在自动驾驶领域的技术进展。
-
英伟达
+关注
关注
23文章
4128浏览量
99780
原文标题:DRIVE Labs“常学常新”系列「终点站」:寻找车位与自动泊车
文章出处:【微信号:NVIDIA_China,微信公众号:NVIDIA英伟达】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
四信智慧公交与自动泊车——“人-车-路-云”深度协同的出行新范式
豪恩汽电自动泊车系统助力广汽埃安N60正式上市

不是顶配算力,元戎如何用高通8650率先实现“车位到车位”?

PB331在车位诱导系统的应用
Infineon HybridPACK™ Drive G2:牵引逆变器的卓越之选
开源鸿蒙领学课堂——山东·泰安站圆满举办

光庭信息与为旌科技自动泊车PoC项目通过主机厂验收
开源鸿蒙领学课堂——新疆·乌鲁木齐站圆满举办

看似简单的自动泊车需要哪些技术支撑?

新能源汽车自动泊车超声波传感器铝电解电容供电稳定

DigiKey 赞助由 Silicon Labs 主办的 Works With 开发者系列活动

贸泽电子开售Silicon Labs全新xG26系列无线SoC和MCU
探索工业自动化核心:ZMC 系列 EtherCAT 主站控制器




评论