 一种智能社区垃圾桶压缩系统的设计
一种智能社区垃圾桶压缩系统的设计
摘 要:
以提高垃圾桶内有效利用空间为目标,采用HT66F70A单片机作为主控制器,设计了一种智能社区垃圾桶压缩系统,其包括自动压缩模块、无线收发模块、自动报警模块、重力检测模块、超声波测距模块、红外感应模块以及外围辅助电路等,集检测、报警及压缩等多种功能于一体,可对垃圾桶进行智能化管理,垃圾达到一定高度后,基于传感器的分析自动压缩,垃圾桶满时能发送信息给终端设备及时提醒工作人员处理。
0
引言
垃圾桶作为一种常见的垃圾容纳工具,在家庭、酒店和社区等场合应用广泛[1]。随着时代的进步,人类生活水平不断提高,垃圾桶形式及用途也不断更新发展,提高垃圾桶内的有效利用空间成为现代人类生活的迫切需要,设计一种智能社区垃圾桶自动压缩系统,将产生良好的社会效益和经济效益。本文从机械结构设计、压缩板计算校核和单片机控制系统等三方面介绍智能社区垃圾桶压缩系统的设计。
1
智能垃圾桶的机械结构设计
智能垃圾桶的机械结构包括倾斜机构、压缩机构和升降机构等三部分。
1.1 倾斜机构设计
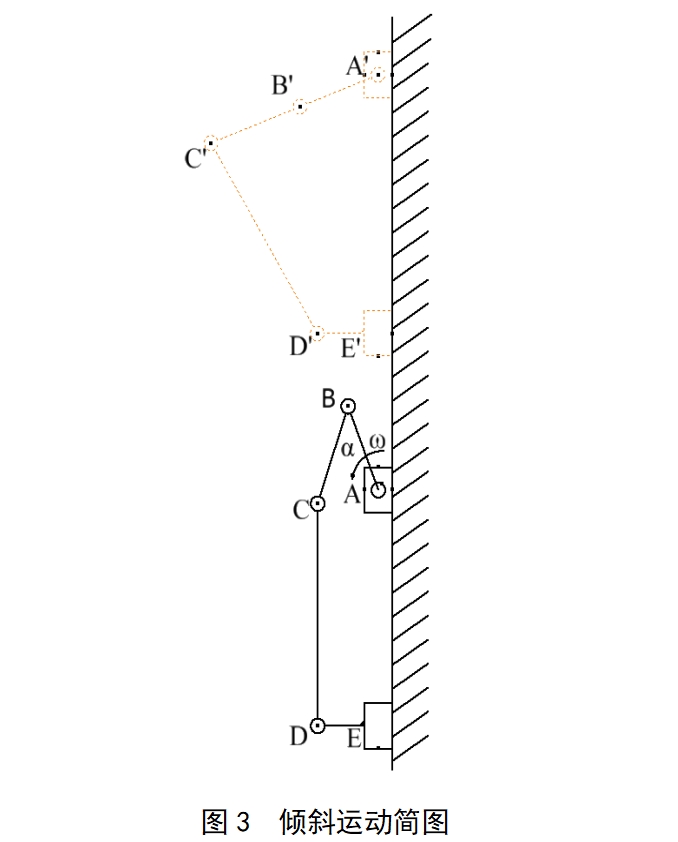
由倾斜机构和垃圾桶本身组成了一个四连杆机构,其运动简图如图3所示。DE为固定结构,保持水平,AB为倾斜机构短杆,而BC为倾斜机构长杆,CD为垃圾桶,倾斜机构ABC初始角度α保持在40°,在上升期间,由于地球引力,倾斜机构A′B′C′所组成的角度α逐渐变大,直至α=α’=180°,即∠ABC=180°,短杆与长杆重合成为一条直线。AE代表升降机构中的齿条,跟随垃圾桶升降。
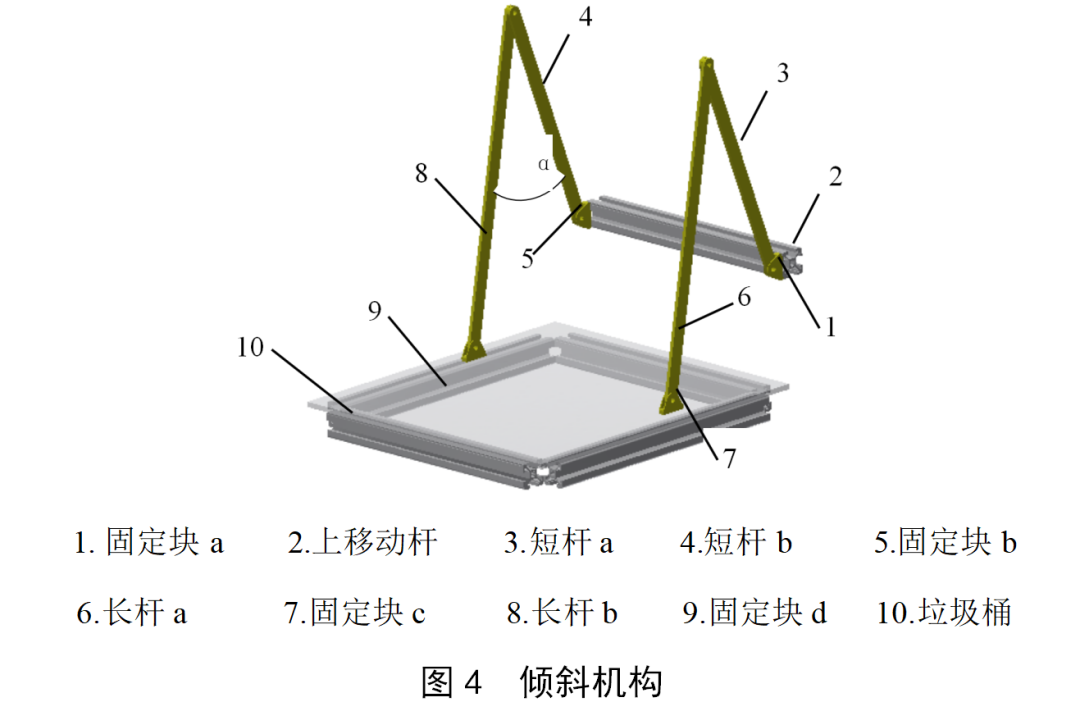
倾斜机构如图4所示,可移动四连杆机构由上下移动杆、短杆、长杆和垃圾桶组合而成,随着垃圾桶升起,由于垃圾桶自身和装入其中的垃圾的重量,短杆与长杆所组成的α会逐渐变大,使垃圾桶倾斜。
1.2 压缩机构设计
压缩机构运动简图如图5所示。MN为丝杆,O为压缩板,压缩板相当于一个滑块在丝杆上做直线运动。压缩机构由步进电机、丝杆、支撑杆、压缩板和轴承座构成,采用双电机为原动力,将旋转运动转化为直线运动。 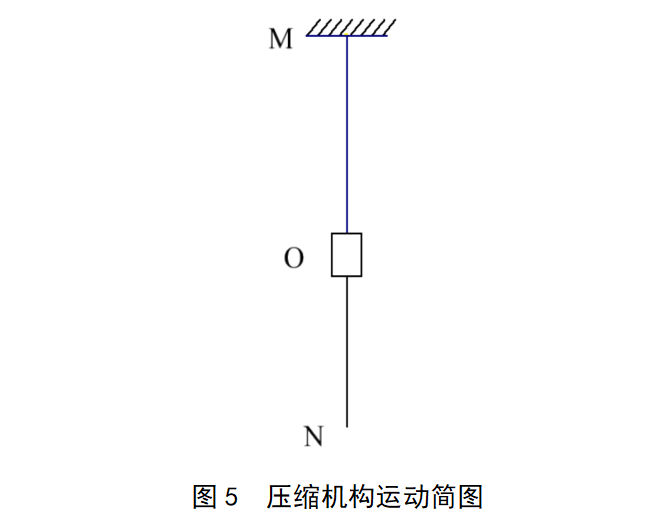
1.3 升降机构设计
升降机构运动简图与压缩机构运动简图5类似,其升降机构都是由齿轮齿条来实现运动过程。
垃圾桶倾卸垃圾前需升高到一定高度,这就需要用到升降机构,垃圾桶满工作人员来倾卸垃圾,按下上升按钮,大功率直流电机带动齿轮同步转动,齿轮转动使与之啮合的齿条上升,齿条两端固定在上、下两根移动杆上,垃圾桶底部和下移动杆连接,桶身上部则由倾斜机构连接到上移动杆,齿条上升带动垃圾桶整体一起上升。垃圾桶下降也是根据同样的原理,按下下降按钮,只要让直流电机反方向转动即可。
升降机构由导轨、上/下移动杆、固定杆、电机、齿轮齿条构成。固定杆的作用是装载直流电机,即固定住齿轮高度,当齿轮齿条相对运动时,实质上是让齿条产生位移量[2]。
2
压缩板计算校核
压缩板材料为亚克力板,尺寸规格为230 mm×230 mm×5 mm,在受力计算校核中将其视为一根横梁,两端固定在丝杆上,主要受到丝杆对其产生的力,压缩板上下移动,将其简化为一端固定,一端可移动的简支梁模型来分析,如图6所示。
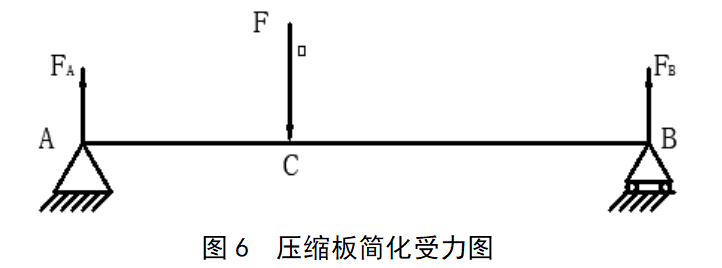
点A和点B分别是压缩板与两丝杆的固定位置,其中,AB的长度为200 mm;力F为压缩板对垃圾所施加的力,FA和FB是丝杆给予压缩板的反力,点C是垃圾主要受力的集中点,假设AC长度为m,F=4 N。 根据平衡方程ΣM=0,对点B进行分析,ΣMB=0,即:

解得:

对A点进行分析,ΣMA=0,即:

解得:

求得:

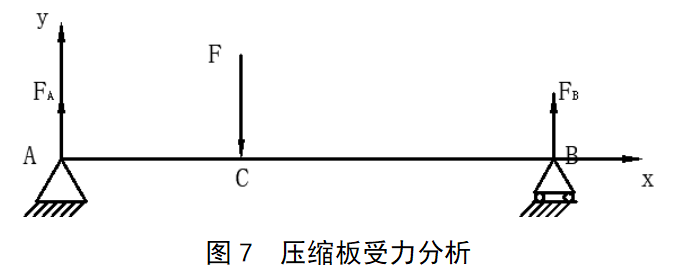
以压缩板左端A点为原点坐标,直线AB为x轴,过A点垂直于AB建立y轴,建立平面直角坐标系,如图7所示。
根据剪力和弯矩的计算方法,如图8所示,求得这一截面上的Fs和M分别为:
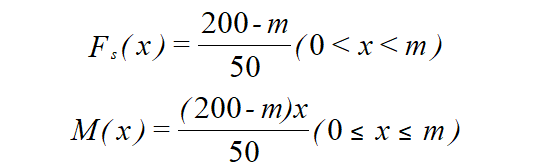
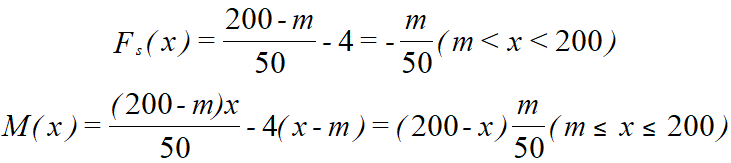
以上两式为压缩板在AC段中的剪力方程和弯矩方程。而在BC段剪力方程和弯矩方程为:
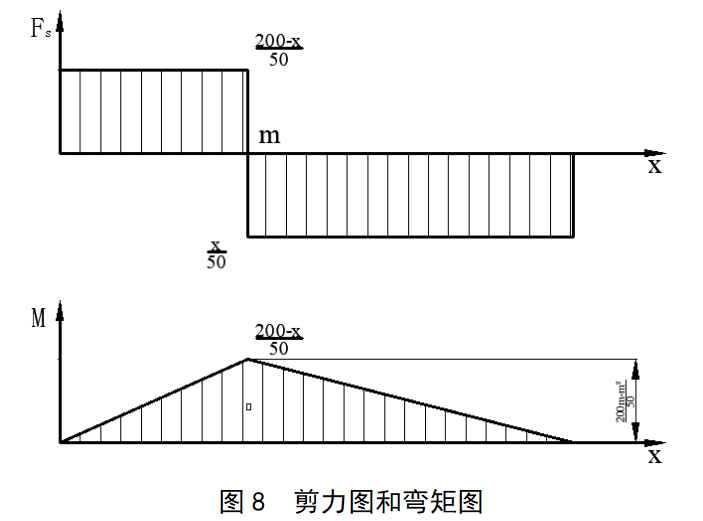
Fs在m=100时左右两边相等,当m无限接近于0和200时,剪力达到最大值,该最大值为4 N,远远小于材料的断裂疲劳强度;从弯矩方程来看,弯矩的大小不仅与m有关,还与截面距离点A的长度x有关,结合弯矩图可以看出,无论x取何值,弯矩最大处总是与参数m的值即F的受力点有关。当m=100时,弯矩最大为200 kN·m,小于压缩板材料的抗弯强度,因此压缩板可正常使用。
3
单片机控制系统
采用HT66F70A单片机作为整个系统的核心,控制垃圾桶的各项功能,使其独立准确地完成各项工作。HT66F70A是HT66Fx0A系列的其中一款单片机,共有8组IO口,分别命名为PA、PB、…、PH,每组含有8个IO端口,用组名加上数字命名,从数字0开始,分别是PA0、PA1、…、PA7,其引脚图如图9所示,每个引脚都具有复用功能,编写程序时应对3个IO口的寄存器和引脚共用寄存器进行初始化设置。
桶盖压缩机构采用电机控制驱动机械结构,而单片机的IO口无法直接驱动电机,采用L298N专用电机驱动芯片,其不仅可同时驱动两个两相电机,也可驱动一个四相电机[3]。采用PWM调速的方法对电机进行调速,开关管在一个周期内的导通时间为t,周期为T,则电机两端的平均电压U=Vcc·t/T=αVcc(其中,α=t/T为占空比,Vcc为电源电压),电机的转速与电机两端的电压成比例,电机两端的电压与控制波形的占空比成正比,因此电机的速度与占空比成比例,占空比越大,电机转得越快。
4
结语
智能社区压缩垃圾桶桶盖由红外感应控制,不用时关闭,能有效抑制垃圾散发气味,防止其他动物乱翻垃圾桶,也有利于里面的压缩机构安全操作;内置压缩机构通过其他传感器的检测,控制压缩机构行程,合理利用空间,减少人力、物力的消耗;短信收发模块会在垃圾桶满后自动发短信到手持终端上,提醒人及时处理,节约资源。该设计适用于不同工况的公共区域,其独特的智能压缩系统大大提升了垃圾桶的利用率及工作效率,具有良好的市场前景和利用价值。
审核编辑:刘清
-
传感器
+关注
关注
2526文章
48110浏览量
740108 -
单片机
+关注
关注
6001文章
43977浏览量
620862 -
控制器
+关注
关注
112文章
15234浏览量
171206 -
无线收发模块
+关注
关注
6文章
53浏览量
31850
原文标题:一种智能社区垃圾桶压缩系统的设计
文章出处:【微信号:机电信息杂志,微信公众号:机电信息杂志】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论