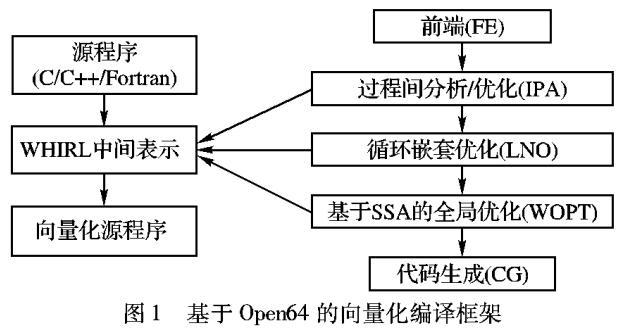
 什么是针对GPU单指令多数据流的编译优化算法
什么是针对GPU单指令多数据流的编译优化算法

1.单指令多数据流
首先来看一段简单的if-else语句:
if(A)
{
B = 1;//Instruction S1
C = 2;//Instruction S2
}
else
{
B = 3;//Instruction S3
C = 4;//Instruction S4
}
假设代码中每条语句转换成指令后分别是S1、S2、S3、S4.
如果在CPU的单指令单数据流中,A=true时会取指令S1和S2执行,A=false时会取指令S3和S4执行,不存在A=true和A=false同时存在的这种情况。
但是在GPU的单指令多数据流(SIMD)中却存在A=true和A=false同时存在的情况。
如下图所示是GPU单指令多数据流的执行情况:
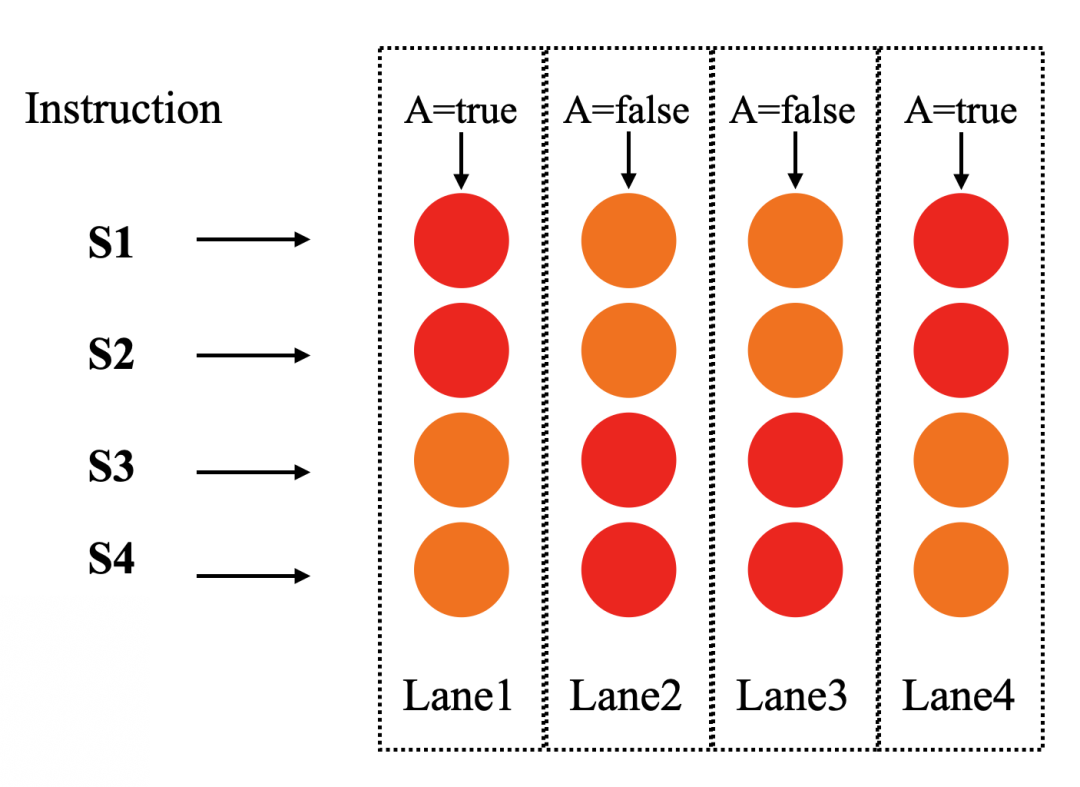
GPU单指令多数据流
从图中可以看到,GPU共有4个通道lane1、lane2、lane3、lane4,分别对应4笔不同的数据。这四个通道共享同一组指令S1、S2、S3、S4(如图中左边所示)。但是在4个不同的lane中,A的值在不同的lane中有时是true,有时是false。红色表示执行该指令,橙色表示不执行该指令。
如果按照CPU单指令单数据流的方式去编译,生成的汇编指令是大概这样的:
goto !A , Labe1;//如果A为false,跳转
mov B , 1;//指令S1
mov C , 2;//指令S2
Lable1:
mov B , 3;//指令S3
mov C , 4;//指令S4
可以看到goto指令会根据A的值进行跳转,GPU中A的值在不同的lane中取值不同,不同的lane根据自己的A值进行跳转是行不通的。因为所有的lane共享同一组指令,不可能有的lane在执行S1、S2语句,有的lane在执行S3、S4语句。
所以GPU的指令应该转换成顺序执行,类似于下面这种。
(p0) mov B , 1;//指令S1
(p0) mov C , 2;//指令S2
(p1) mov B , 3;//指令S3
(p1) mov C , 4;//指令S4
此时不同的lane都会按照顺序取值S1,S2,S3,S4,但是具体的lane中会根据前面的p寄存器的取值确定是否执行该指令。例如对于同一条指令S1,根据A的输入,有的lane是执行的(红色),有的lane是不执行的(橙色)。
一句话总结就是:GPU是单指令多数据流(SIMD)架构,当多笔数据过来时,不一定同时跳转,本文介绍的if-conversion算法能够消除所有的跳转指令,可以将控制依赖转换为数据依赖。
2.if-conversion算法
总共分四步:
- 计算直接后继支配节点
- 计算控制依赖CD
- 计算R&K函数
- Augment K
首先要计算直接后继支配节点,因为在控制依赖CD的计算中需要用到。
什么是控制依赖CD,一个简单的例子就是if语句中的block y是受if语句所在的block x所控制的。此时CD(y) = x, 称为y控制依赖于x。
R&K分别对应寄存器p的use与def,即寄存器p的使用与定义。
R(x):表示分配给block x的谓词寄存器。block x的执行与否受R(x)中的寄存器控制。也可以说是p的use,即寄存器p用于block x。
K(p):表示谓词寄存器p需要在K(p)中的block中定义。也就是寄存器的def,即寄存器p在那个block定义。
2.1 直接后继支配节点
首先要弄清楚两个概念:后继支配节点、直接后继支配节点。
后继支配节点:如果从节点y到出口节点的每一条路径都经过节点x,则x为y的后继支配节点。
记作:x pdom y
直接后继支配节点:x pdom y,不存在节点z,使得x pdom z 且 z pdom y。则x为y的直接后继支配节点。
记作:x ipdom y
计算后继支配节点的迭代算法:
change = true;
//init pdom set
pdom(exit_block) = {exit_block}
pdom(0:eeit_block-1) = {all blocks}
//iterate flow graph
while(change)
{
change = false;
for( each block n) with post order
{
tmp = {all blocks};
//求节点n所有直接后继节点的共同后继支配节点
for(each n's successor block p)
{
tmp = tmp & pdom(p);//求交集
}
//n的后继支配节点包括他本身
tmp = tmp | {n};
if(tmp!=pdom(n))
{
pdom(n) = tmp;
change = true;
}
}
}
求后继支配节点的算法一句话概括:节点n的后继支配节点包括他本身,以及他所有直接后继节点的共同后继支配节点。
计算直接后继支配节点的算法:
//remove itself from it's pdom set
for each node n
{
pdom(n)-={n};
}
for each node n with post order
{
for each s in pdom(n){
//移除直接后继支配节点的后继支配节点
for each t in set( pdom(n)-s ){
if( t is in pdom(s) )
pdom(n)-={t}
}
}
}
后继支配节点 = 直接后继支配节点 + (直接后继支配节点)的后继支配节点
前面已经求出了后继支配节点,因此在后继支配节点中移除(直接后继支配节点)的后继支配节点,即可得到直接后继支配节点。
下图是一个计算直接后继支配节点的例子:
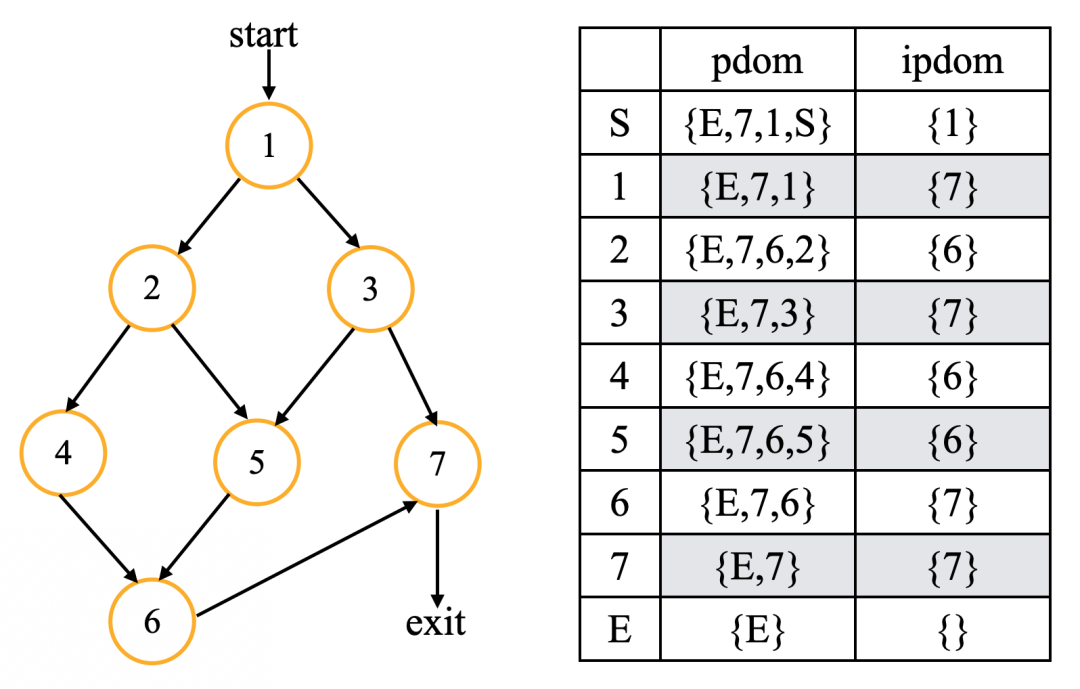
直接后继支配节点
2.2. CD
CD是Control Dependent的缩写。直接上英文定义可能更准确一些,详细证明可参考文章末尾给出的论文,公众号后台回复SIMD关键字即可下载。
Y is control dependent on X iff
(1) there exists a directed path P from X to Y with any Z in P (excluding X and Y) post-dominated by Y
(2) X is not post-dominated by Y.
计算CD的算法:
pdom(x) = {y in N: y pdom x}
ipdom(x) = {y in N: y ipdom x}
for [x,y,label] in E such that y not in pdom(x)
{
Lub = ipdom(x);
if !label
x = -x
t = y;
while(t!=Lub)
{
CD(t) = CD(t) U {x}//U表示求并集
t = ipdom(t);
}
}
上述伪代码中的!label表示由block x到block y的执行条件为false。
计算CD的算法用一句话概括:对于[x,y,label],在支配节点树中,从ipdom(x)到y的路径上的所有节点都控制依赖于x,不包括ipdom(x)。
以[1,2,true]为例,ipdom(x) = 7,从下面的后继支配节点树可知,7到2经过的节点有6,2(不包括7),因此节点6和2都控制依赖于节点1.
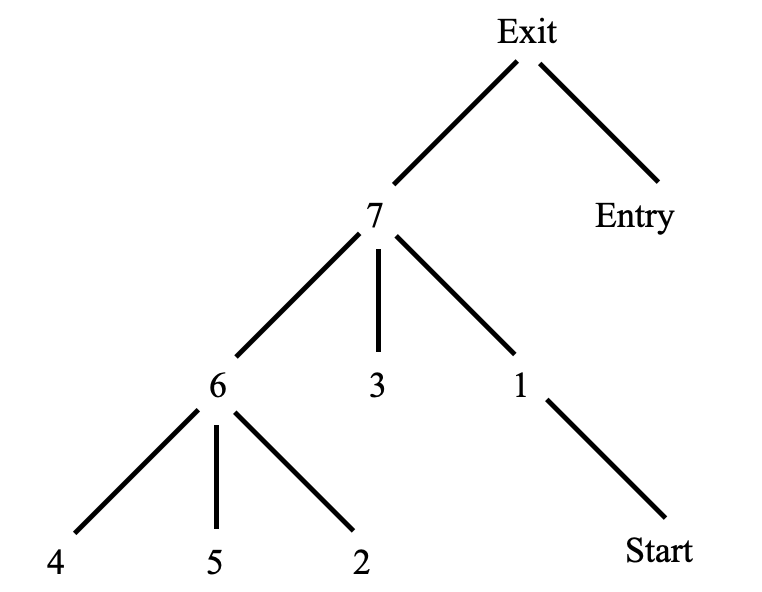
后继支配节点树
下图是CD计算的结果:整篇文章都使用同一个控制流图作为实例
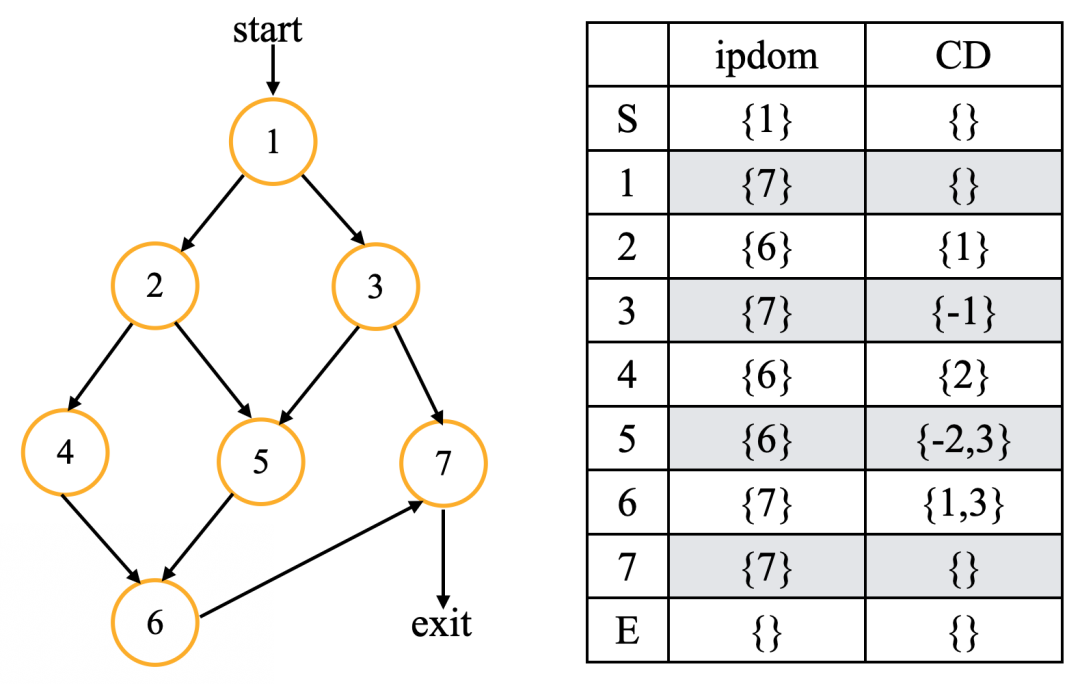
CD计算结果
2.3. 计算R&K
p = 1;
for x in N
t = CD(x);
if t in K
{
//性质2
R(x) = q such that K(q) = t;
}
else
{
K(p) = t;
R(x) = p++;
}
性质1:每一个block x有且仅有一个对应的p = R(x)
性质2:对于两个不同的block,如果它们的控制依赖都为k(p),则这两个block对应的寄存器都为p(对应上述算法中的if语句)
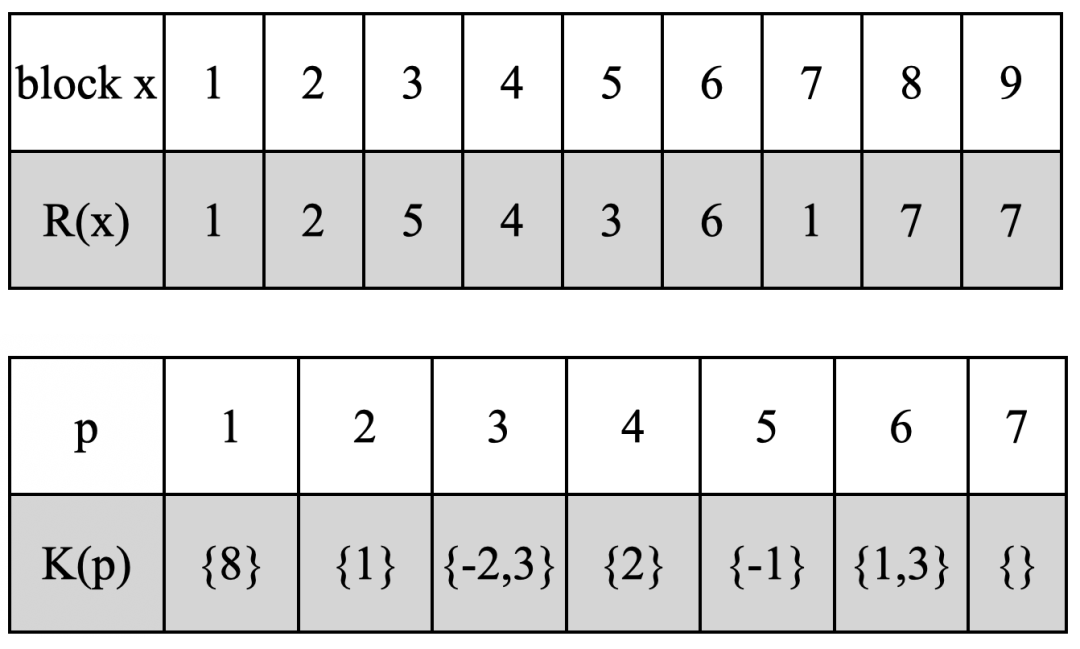
R与K的计算结果
2.4. Augment K
k(p)表明p需要在哪些block初始化,但是存在一条路径,刚好没有经过k(p),这个时候p没有被初始化。因此需要在start节点对p进行初始化。
主要是针对类似的if语句嵌套:
//原始的控制流
if(condition1)
{
block1
if(codition2)
{
block2
}
else
{
block3
}
}
上面的控制流最终会转化成如下的顺序执行,只是每个block会有一个p寄存器去guard。
最终会转化为这样:
//转换后的顺序执行,是否执行受p寄存器控制
(p1) block1;//p2与p3都会在block1中初始化
(p2) block2;
(p3) block3;
原始的控制流中p2与p3都会在block1中初始化,如果block1没有执行,那么p2与p3就没有被初始化。因此需要在开始节点处将p2与p3初始化为false。
为什么初始化为false而不是true?因为block1没有执行,说明block2与block3也不应该执行,所以初始化为false。
上述过程是为什么要做Augment K,实际上Augment K要做的只有一件事:找到未初始化的寄存器p,在start节点处将p初始化为false。
在程序中找到为初始化的变量很简单,从后向前做活跃变量分析,如果变量在入口处还是活跃的,则该变量没有被初始化。
因为从后向前做活跃变量分析的时候,变量的每次定义都会被Kill掉(公式1),如果在程序的入口处都没有被Kill掉说明该变量是没有被初始化过的。
(公式1)
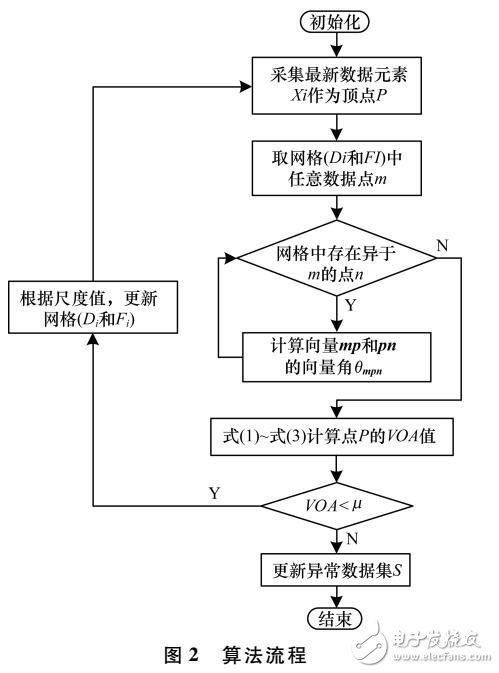
(公式2)
本算法中只需要对p寄存器进行活跃变量分析,use和def分别对应已经求出的R与K。
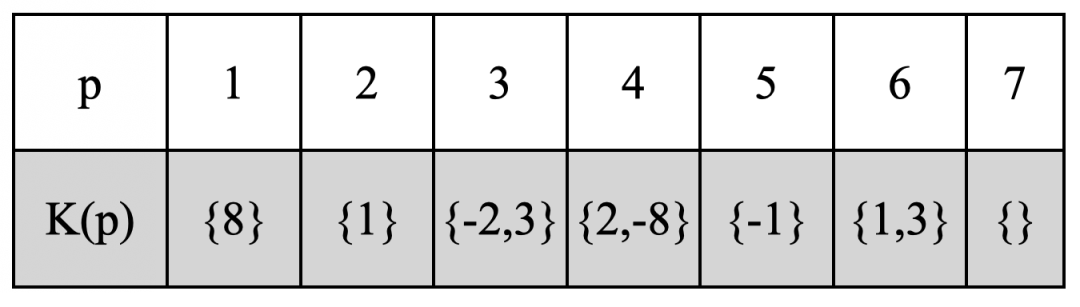
Augment K结果
四个步骤做完后最终的结果如下:
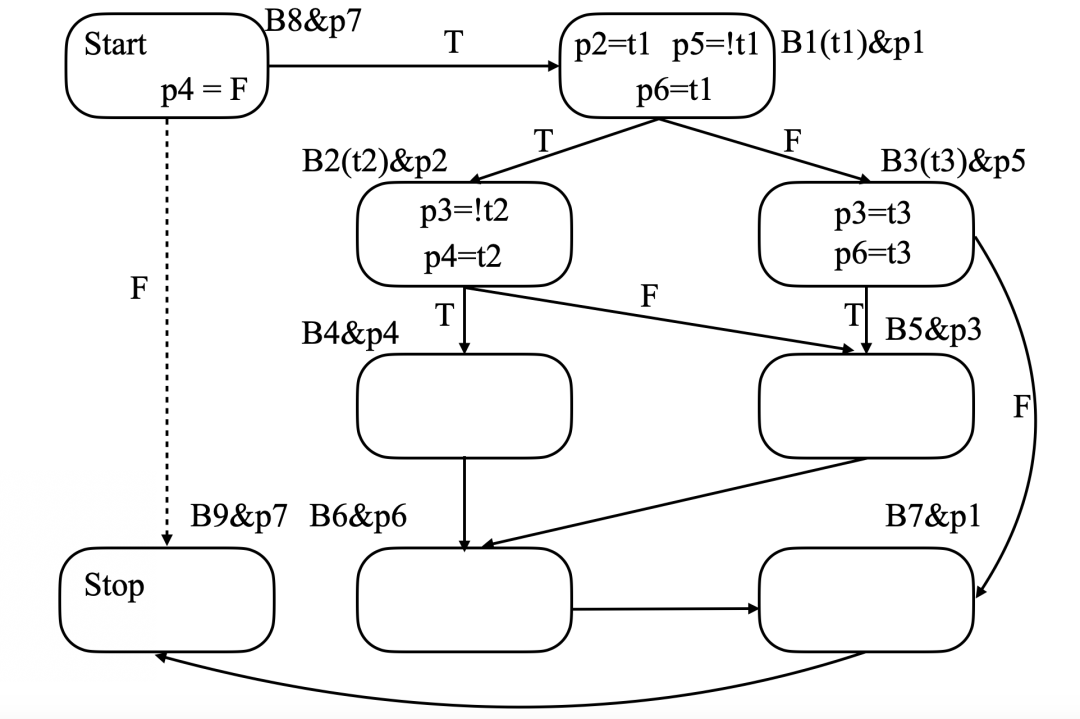
p寄存器分配的最后结果
图中B2(t2)p2表示寄存器p2控制B2,条件t2与B2相关联。
3.后记
刚接触if-conversion算法的时候觉得挺复杂的,在写文章的过程中对整个算法的理解又有了更深刻的理解,有一种无法言喻的喜悦。
-
cpu
+关注
关注
68文章
11382浏览量
226566 -
指令
+关注
关注
1文章
624浏览量
37721 -
数据流
+关注
关注
0文章
131浏览量
16609
发布评论请先 登录
有限通信资源下多数据流连接的降载算法
大多数为单指令周期
sse指令集
什么是因特网数据流单指令序列扩展?
网络数据流存储算法分析与实现
一种动态调度与静态优化的数据流编译系统

数据流编程模型优化
发掘函数级单指令多数据向量化的方法
改进的多数据流协同频繁项集挖掘算法
一种支持单双模式选择的SIMD编译优化算法

基于角度方差的数据流异常检测算法
DSP的并行指令分析和冗余优化算法



评论