 能2公里无线遥控的2.4GHz遥控器
能2公里无线遥控的2.4GHz遥控器

工具:
焊枪+焊锡
焊接夹具
螺丝刀
胶水

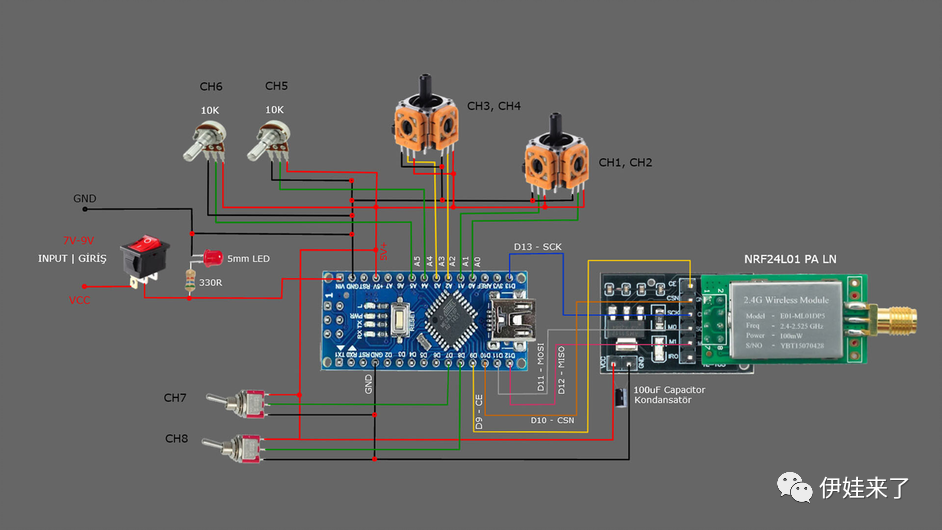
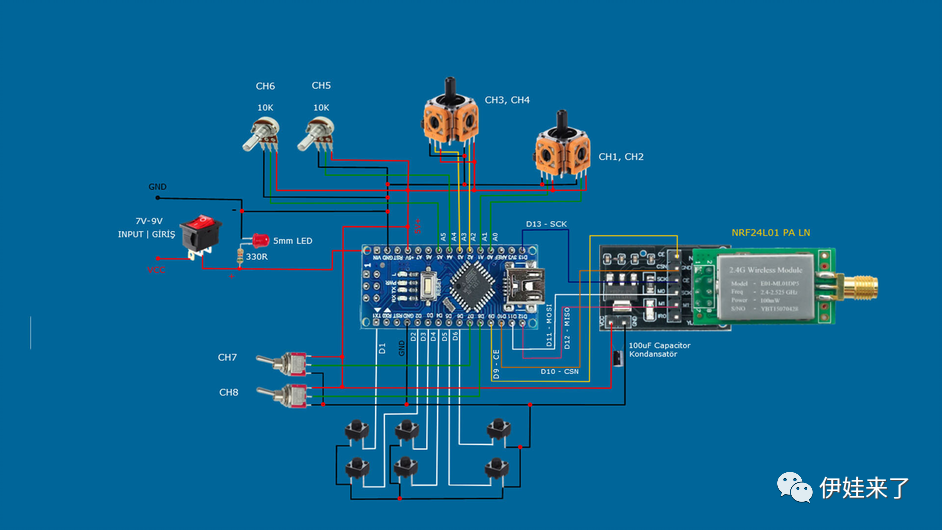
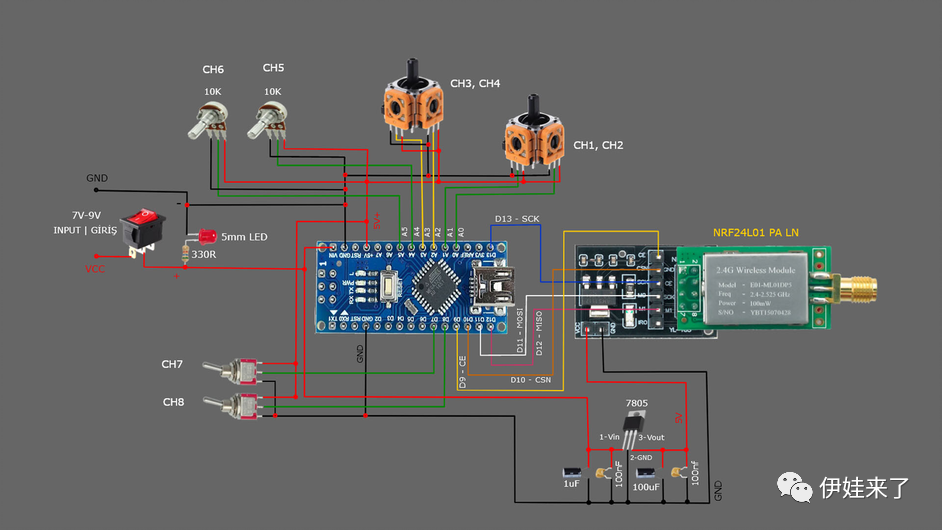
遥控器(发射器):
1 xNRF24L01+PA+LNA2.4G发射接收通信模块
1 x24L01无线模块转接板
1 xArduinoNano板
1 x100nF100纳法电容
2 x双轴按键传感器
2 x2档摇臂开关
1 x7.4v460Mah锂电池
1 x330R电阻
1 x10K电位器
2 x15P2.54mm单排排针插座
1 x54mmX20mmPCB板
1 x7-9V的电池或者1x6节五号电池盒跟电池
若干:PCB板、电线、螺丝
// 8 Channel Transmitter (No Trim) | 8 Kanal Verici (Trim Yok)// Input pin A5 #include #include #include const uint64_t pipeOut = 000322; // NOTE: The same as in the receiver 000322 | Alıcı kodundaki adres ile aynı olmalı RF24 radio(9, 10); // select CE,CSN pin | CE ve CSN pinlerin seçimi struct Signal { byte throttle; byte pitch; byte roll; byte yaw; byte aux1; byte aux2; byte aux3; byte aux4; }; Signal data; void ResetData(){ data.throttle = 0; data.pitch = 127; data.roll = 127; data.yaw = 127; data.aux1 = 0; // Signal lost position | Sinyal kesildiğindeki pozisyon data.aux2 = 0; data.aux3 = 0; data.aux4 = 0;} void setup(){ //Configure the NRF24 module | NRF24 modül konfigürasyonu radio.begin(); radio.openWritingPipe(pipeOut); radio.setAutoAck(false); radio.setDataRate(RF24_250KBPS); // The lowest data rate value for more stable communication | Daha kararlı iletişim için en düşük veri hızı. radio.setPALevel(RF24_PA_MAX); // Output power is set for maximum | Çıkış gücü maksimum için ayarlanıyor. radio.stopListening(); // Start the radio comunication for Transmitter | Verici için sinyal iletişimini başlatır. ResetData(); } // Joystick center and its borders | Joystick merkez ve sınırları int Border_Map(int val, int lower, int middle, int upper, bool reverse){ val = constrain(val, lower, upper); if ( val < middle ) val = map(val, lower, middle, 0, 128); else val = map(val, middle, upper, 128, 255); return ( reverse ? 255 - val : val );} void loop(){ // Control Stick Calibration for channels | Her bir kanal için kumanda Kol Kalibrasyonları data.roll = Border_Map( analogRead(A3), 0, 512, 1023, true ); // "true" or "false" for signal direction | "true" veya "false" sinyal yönünü belirler data.pitch = Border_Map( analogRead(A2), 0, 512, 1023, true ); data.throttle = Border_Map( analogRead(A1),570, 800, 1023, false ); // For Single side ESC | Tek yönlü ESC için // data.throttle = Border_Map( analogRead(A1),0, 512, 1023, false ); // For Bidirectional ESC | Çift yönlü ESC için data.yaw = Border_Map( analogRead(A0), 0, 512, 1023, true ); data.aux1 = Border_Map( analogRead(A4), 0, 512, 1023, true ); // "true" or "false" for change signal direction | "true" veya "false" sinyal yönünü değiştirir. data.aux2 = Border_Map( analogRead(A5), 0, 512, 1023, true ); // "true" or "false" for change signal direction | "true" veya "false" sinyal yönünü değiştirir. data.aux3 = digitalRead(7); data.aux4 = digitalRead(8); radio.write(&data, sizeof(Signal));}
// 8 Channel Transmitter & Trims | 8 Kanal Verici ve Trimler #include #include #include #include const uint64_t pipeOut = 000322; // NOTE: The same as in the receiver 000322 | Alıcı kodundaki adres ile aynı olmalı RF24 radio(9, 10); // Select CE,CSN pin | CE ve CSN pinlerin seçimi #define trimbut_1 1 // Trim button 1 / Pin D1 #define trimbut_2 2 // Trim button 2 / Pin D2 #define trimbut_3 3 // Trim button 3 / Pin D3 #define trimbut_4 4 // Trim button 4 / Pin D4 #define trimbut_5 5 // Trim button 5 / Pin D5 #define trimbut_6 6 // Trim button 6 / Pin D6 int tvalue1 = EEPROM.read(1) * 4; // Reading trim values from Eprom | Trim değerlerinin Epromdan okunması int tvalue2 = EEPROM.read(3) * 4; int tvalue3 = EEPROM.read(5) * 4; struct Signal { byte throttle; byte pitch; byte roll; byte yaw; byte aux1; byte aux2; byte aux3; byte aux4;}; Signal data; void ResetData(){ data.throttle = 512; // Signal lost position | Sinyal kesildiğindeki pozisyon data.pitch = 127; data.roll = 127; data.yaw = 127; data.aux1 = 0; data.aux2 = 0; data.aux3 = 0; data.aux4 = 0;} void setup(){ // Configure the NRF24 module | NRF24 modül konfigürasyonu radio.begin(); radio.openWritingPipe(pipeOut); radio.setAutoAck(false); radio.setDataRate(RF24_250KBPS); // The lowest data rate value for more stable communication | Daha kararlı iletişim için en düşük veri hızı. radio.setPALevel(RF24_PA_MAX); // Output power is set for maximum | Çıkış gücü maksimum için ayarlanıyor. radio.stopListening(); // Start the radio comunication for Transmitter | Verici için sinyal iletişimini başlatır. ResetData(); pinMode(trimbut_1, INPUT_PULLUP); pinMode(trimbut_2, INPUT_PULLUP); pinMode(trimbut_3, INPUT_PULLUP); pinMode(trimbut_4, INPUT_PULLUP); pinMode(trimbut_5, INPUT_PULLUP); pinMode(trimbut_6, INPUT_PULLUP); tvalue1= EEPROM.read(1) * 4; tvalue2= EEPROM.read(3) * 4; tvalue3= EEPROM.read(5) * 4;} // Joystick center and its borders | Joystick merkez ve sınırları int Border_Map(int val, int lower, int middle, int upper, bool reverse){ val = constrain(val, lower, upper); if ( val < middle ) val = map(val, lower, middle, 0, 128); else val = map(val, middle, upper, 128, 255); return ( reverse ? 255 - val : val );} void loop(){ // Trims and Limiting trim values | Trimler ve Trim değerlerini sınırlandırma if(digitalRead(trimbut_1)==LOW and tvalue1 < 630) { tvalue1=tvalue1+15; EEPROM.write(1,tvalue1/4); delay (130); } if(digitalRead(trimbut_2)==LOW and tvalue1 > 280){ tvalue1=tvalue1-15; EEPROM.write(1,tvalue1/4); delay (130); } if(digitalRead(trimbut_3)==LOW and tvalue2 < 630) { tvalue2=tvalue2+15; EEPROM.write(3,tvalue2/4); delay (130); } if(digitalRead(trimbut_4)==LOW and tvalue2 > 280){ tvalue2=tvalue2-15; EEPROM.write(3,tvalue2/4); delay (130); } if(digitalRead(trimbut_5)==LOW and tvalue3 < 630) { tvalue3=tvalue3+15; EEPROM.write(5,tvalue3/4); delay (130); } if(digitalRead(trimbut_6)==LOW and tvalue3 > 280){ tvalue3=tvalue3-15; EEPROM.write(5,tvalue3/4); delay (130); } // Control Stick Calibration for channels | Her bir kanal için kumanda Kol Kalibrasyonları data.roll = Border_Map( analogRead(A3), 0, tvalue1, 1023, true ); // "true" or "false" for signal direction | "true" veya "false" sinyal yönünü belirler data.pitch = Border_Map( analogRead(A2), 0, tvalue2, 1023, true ); data.throttle = Border_Map( analogRead(A1),570, 800, 1023, false ); // For Single side ESC | Tek yönlü ESC için // data.throttle = Border_Map( analogRead(A1),0, 512, 1023, false ); // For Bidirectional ESC | Çift yönlü ESC için data.yaw = Border_Map( analogRead(A0), 0, tvalue3, 1023, true ); data.aux1 = Border_Map( analogRead(A4), 0, 512, 1023, true ); data.aux2 = Border_Map( analogRead(A5), 0, 512, 1023, true ); data.aux3 = digitalRead(7); data.aux4 = digitalRead(8); radio.write(&data, sizeof(Signal));}
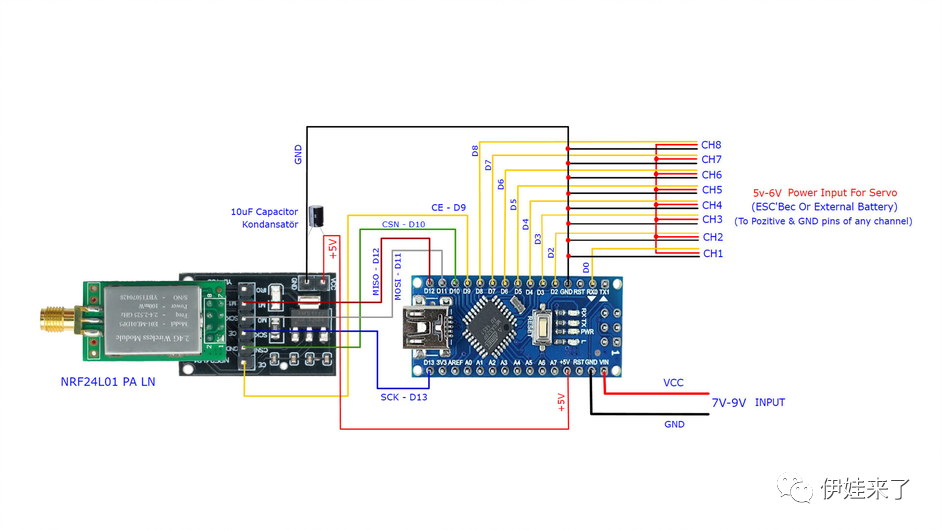
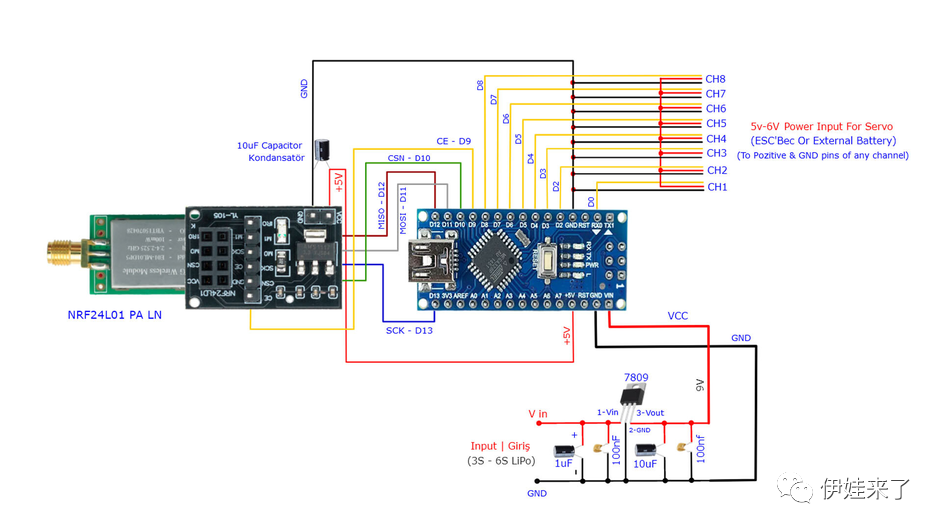
控制电机(接收器):
1xNRF24L01+PA+LNA2.4G发射接收通信模块
1x24L01无线模块转接板
1xArduinoNano板
1x100nF100纳法电容
2x15P2.54mm单排排针插座
3x8P单排排针
1x54mmX20mmPCB板
1x7-9V的锂电池
1x无刷电机+电子调速器(测试用,也可换舵机)
6x轻触开关
若干:PCB板、电线
// 8 Channel Receiver | 8 Kanal Alıcı
#include #include #include #include
int ch_width_1 = 0;int ch_width_2 = 0;int ch_width_3 = 0;int ch_width_4 = 0;int ch_width_5 = 0;int ch_width_6 = 0;int ch_width_7 = 0;int ch_width_8 = 0;
Servo ch1;Servo ch2;Servo ch3;Servo ch4;Servo ch5;Servo ch6;Servo ch7;Servo ch8;
struct Signal {
byte throttle;byte pitch;byte roll;byte yaw;byte aux1;byte aux2;byte aux3;byte aux4;};
Signal data;
const uint64_t pipeIn = 000322;RF24 radio(9, 10);
void ResetData(){
data.throttle = 0;data.roll = 127;data.pitch = 127;data.yaw = 127;data.aux1 = 0; // Define the inicial value of each data input. | Veri girişlerinin başlangıç değerleridata.aux2 = 0;data.aux3 = 0;data.aux4 = 0;}
void setup(){ // Set the pins for each PWM signal | Her bir PWM sinyal için pinler belirleniyor. ch1.attach(0); ch2.attach(2); ch3.attach(3); ch4.attach(4); ch5.attach(5); ch6.attach(6); ch7.attach(7); ch8.attach(8);
ResetData(); // Configure the NRF24 module | NRF24 Modül konfigürasyonu radio.begin(); radio.openReadingPipe(1,pipeIn); radio.setAutoAck(false); radio.setDataRate(RF24_250KBPS); // The lowest data rate value for more stable communication | Daha kararlı iletişim için en düşük veri hızı. radio.setPALevel(RF24_PA_MAX); // Output power is set for maximum | Çıkış gücü maksimum için ayarlanıyor. radio.startListening(); // Start the radio comunication for receiver | Alıcı için sinyal iletişimini başlatır.
}
unsigned long lastRecvTime = 0;
void recvData(){while ( radio.available() ) {radio.read(&data, sizeof(Signal));lastRecvTime = millis(); // Receive the data | Data alınıyor}}
void loop(){recvData();unsigned long now = millis();if ( now - lastRecvTime > 1000 ) {ResetData(); // Signal lost.. Reset data | Sinyal kayıpsa data resetleniyor}
ch_width_1 = map(data.roll, 0, 255, 1000, 2000);ch_width_2 = map(data.pitch, 0, 255, 1000, 2000);ch_width_3 = map(data.throttle, 0, 255, 1000, 2000);ch_width_4 = map(data.yaw, 0, 255, 1000, 2000);ch_width_5 = map(data.aux1, 0, 255, 1000, 2000);ch_width_6 = map(data.aux2, 0, 255, 1000, 2000);ch_width_7 = map(data.aux3, 0, 1, 1000, 2000);ch_width_8 = map(data.aux4, 0, 1, 1000, 2000);
ch1.writeMicroseconds(ch_width_1); // Write the PWM signal | PWM sinyaller çıkışlara gönderiliyorch2.writeMicroseconds(ch_width_2);ch3.writeMicroseconds(ch_width_3);ch4.writeMicroseconds(ch_width_4);ch5.writeMicroseconds(ch_width_5);ch6.writeMicroseconds(ch_width_6);ch7.writeMicroseconds(ch_width_7);ch8.writeMicroseconds(ch_width_8);
}
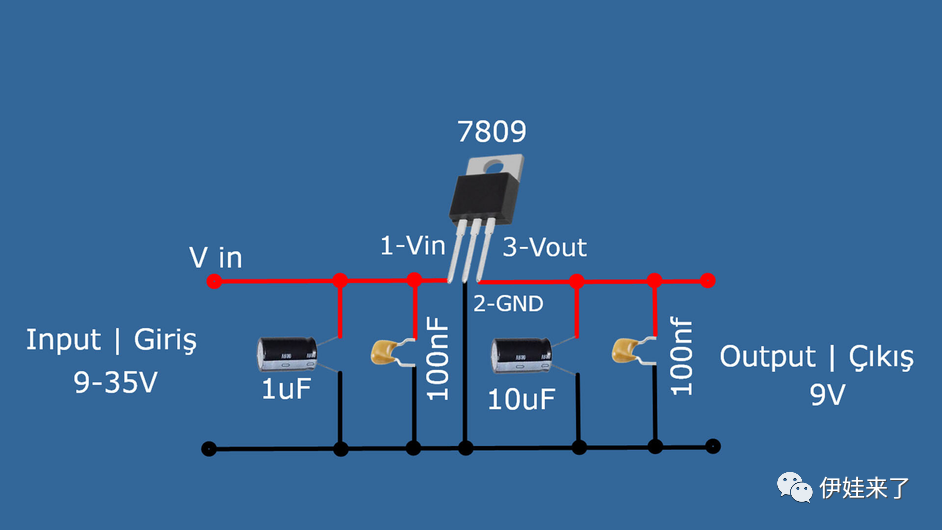
9V稳压器:
1 x7809三级稳压管
1 x1uF微法电容
1 x10uF微法电容
2 x100nf纳法电容
若干:PCB板、电线
5V稳压器:
1 x7805三级稳压管
1 x1uF微法电容
1 x10uF微法电容
2 x100nf纳法电容
若干:PCB板、电线
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
遥控器
+关注
关注
18文章
870浏览量
71100 -
DIY
+关注
关注
176文章
896浏览量
357530 -
nRF24L01
+关注
关注
17文章
331浏览量
72855 -
2.4GHz
+关注
关注
0文章
47浏览量
18722 -
Arduino
+关注
关注
190文章
6514浏览量
195904
发布评论请先 登录
相关推荐
热点推荐
nRFready™2.4GHz 射频智能遥控器参考设计
外围设备,这种无线和协议的组合提供带宽,延迟和共存性能,无缝支持所有nRFready™射频智能遥控器的先进功能,即使在最具挑战性的2.4GHz的操作环境(例如,附近有其它的Wi - Fi和蓝牙
发表于 03-24 10:09
nRFready™2.4GHz 射频智能遥控器参考设计
外围设备,这种无线和协议的组合提供带宽,延迟和共存性能,无缝支持所有nRFready™射频智能遥控器的先进功能,即使在最具挑战性的2.4GHz的操作环境(例如,附近有其它的Wi - Fi和蓝牙
发表于 03-24 12:53
2.4GHz 无线VISTA遥控器实验开发系统
attach://167141.pdfattach://167141.pdf为了便于用户开发应用先进的Nordic Flash SOC无线芯片,迅通科技提供2.4GHz 无线VISTA遥控器
发表于 11-04 09:31
家电常用2.4G遥控器方案
`睿讯电子提供的2.4G遥控器方案已经在市场上推广应用达5年之久,也是国内最早从事普及型2.4G遥控器的方案商,我们可提供全系列数字RF遥控器
发表于 11-11 15:43
万能遥控器设置方法_万能遥控器代码
电视是每个家庭必不可少的家用电器,所以我们在使用遥控器的时间也会比较多。但如果遥控器换了怎么办,很多人都会想到配一个万能遥控器,那么万能
发表于 09-14 18:08
•19.1w次阅读

2.4G遥控器解决方案
日常生活当中我们常用的遥控器就是无线红外遥控器,这种遥控器成本低,实用性也强,不好的地方就是不能随便转换角度遥控,也不能遮挡。但
2.4G遥控器方案开发,无需指向也可以进行遥控
相比于传统的红外线式遥控器,无线2.4g遥控器摆脱了指向性的问题,我们可以在屋内任何位置以及任何角度来使用遥控器操作设备而不用担心设备无法接

宇凡微2.4G遥控器方案开发,灵活控制无需指向
日常生活当中我们常用的遥控器就是无线红外遥控器,这种遥控器成本低,实用性也强,不好的地方就是不能随便转换角度遥控,也不能遮挡。但
2.4G无线遥控器方案开发,稳定性强,可用于多种应用
2.4G遥控器是一种使用2.4GHz频段的无线遥控器,常用于遥控玩具、航模和家电等电子设备上。相
应用在机顶盒遥控器中的2.4GHz无线芯片
机顶盒遥控器是用于控制机顶盒,进而控制电视机的遥控器。以机顶盒遥控器为例,其遥控器按钮由前后两部分组成,前一部分按钮是用来代替电视机遥控器的






 工商网监
工商网监
评论