 针对温度控制过程而设计的FB58
针对温度控制过程而设计的FB58

功 能:FB58 “TCONT_CP“ 针对温度控制过程而设计(也可应用于其他控制过程),可实现连续调节及比例调节元件的两级调节。
输出类型:模拟量输出或PWM输出可选。
应用领域:特别适用于温度控制过程,可选 PI 或 PID 控制方式。适用于带自整定功能的回路。
特 点:具备温度信号转换的功能,带自整定功能,同时具备模拟量输出和PWM输出方式,两步控制方式,比例作用可弱化,控制带功能。
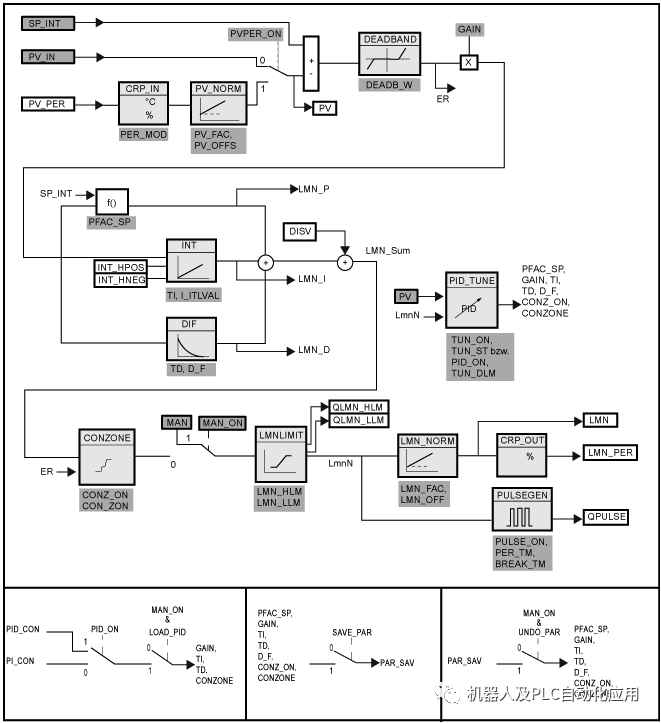
图1.FB58"TCONT_CP" 的方框图
主要参数
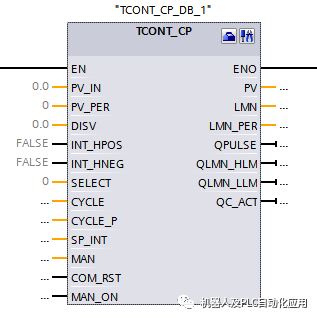
图2. FB58"TCONT_CP"程序块
注:以TIA Portal V13 SP1为例,该功能块在STEP 7中的管脚与其相同
表1. FB58"TCONT_CP" 的输入参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| PV_IN | IN | REAL | -100~100(%)或者 物理值 | 0.0 | 过程变量输入 | 必须与SP_INT单位一致 |
| PV_PER | IN | INT | 0 | 外设过程变量输入 | PIW xxx | |
| DISV | IN | REAL | -100~100(%) | 0.0 | 干扰变量 | |
| INT_HPOS | IN | BOOL | FLASE | 积分作用的输出可在正向保持 | 必须与SP_INT单位一致 | |
| INT_HNEG | IN | BOOL | FLASE | 积分作用的输出可在负向保持 | ||
| SELECT | IN | INT | 0 | 模式选择 |
如果脉冲整形器开启,则有几种方法可以调用 PID 算法和脉冲整形器: SELECT = 0:以快速循环中断优先级等级调用控制器,处理 PID 算法和脉冲整形器。 SELECT = 1:在 OB1 中调用控制器,仅处理 PID 算法。 SELECT = 2:以快速循环中断优先级等级调用控制器,仅处理脉冲整形器。 SELECT = 3:以慢速循环中断优先级等级调用控制器,仅处理 PID 算法。 |
表2. FB58"TCONT_CP" 的输入输出参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 应用 |
|---|---|---|---|---|---|---|
| CYCLE | IN/OUT | REAL | 0.1(s) | 采样时间 | ||
| CYCLE_P | IN/OUT | REAL | 0.02(s) | 脉冲整形器作用的采样时间 | ||
| SP_INT | IN/OUT | REAL | 0.0 | 设定值 | ||
| MAN | IN/OUT | REAL | 0.0 | 手动控制值 | ||
| COM_RST | IN/OUT | BOOL | 0.0 | 完全重启动 | 置位后自动复位 | |
| MAN_ON | IN/OUT | BOOL | TRUE | 手/自动切换按钮 |
MAN_ON: 0:自动 1:手动 |
表3. FB58"TCONT_CP"的输出参数
| 参数 | 变量类型 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
| LMN | OUT | REAL | 0.0 | 调节值 | ||
| LMN_PER | OUT | INT | 0 | 外设调节值 | PQW xxx | |
| QLMN_HLM | OUT | BOOL | FALSE | 调节值上限报警 | ||
| QLMN_LLM | OUT | BOOL | FALSE | 调节值下限报警 | ||
| LMN_P | OUT | REAL | 0.0 | 比例分量 | ||
| LMN_I | OUT | REAL | 0.0 | 积分分量 | ||
| LMN_D | OUT | REAL | 0.0 | 微分分量 | ||
| PV | OUT | REAL | 0.0 | 当前值输出 | ||
| QPLUSE | OUT | BOOL | FLASE | 脉冲输出 | ||
| QC_ACT | OUT | BOOL | FLASE | 连续控制指示 | 此参数指示是否在下一次调用块时处理连续控制组件(仅当 SELECT 的值为 0 或为 1 时才相关) |
表4. FB58"TCONT_CP"的常用静态参数
| 参数 | 偏移量 | 数据类型 | 取值范围 | 默认 | 描述 | 说明 |
|---|---|---|---|---|---|---|
| DEAD_W | 44.0 | REAL | 0.0 | 死区 | ||
| I_ITLVAL | 48.0 | REAL | -100~100(%) | 0.0 | 积分初始值 | |
| LMN_HLM | 52.0 | REAL | FALSE | 输出值上限 | ||
| LMN_LLM | 56.0 | REAL | FALSE | 输出值下限 | ||
| PER_TM | 76.0 | REAL | 0.0 | 周期时间 | 脉冲调制的周期时间 | |
| P_B_TM | 80.0 | REAL | 0.0 | 最小脉冲/中断时间 | 防止阀门频繁开关 | |
| TUN_DLMN | 84.0 | REAL | -100~100(%) | 0.0 | 阶跃值 | 控制器调节的过程激发是由 TUN_DLMN 中的输出值阶跃变化引起的。 |
| PER_MODE | 88.0 | INT | 0 | 输入值模式选择 |
可使用此开关输入 I/O 模块的类型。然后,在 PV 输出中对输入 PV_PER 中的过程值进行如下标定: PER_MODE = 0:热电偶;PT100/NI100;标准 PV_PER * 0.1 单位:°C,°F PER_MODE = 1:PT100/NI100;气候型 PV_PER * 0.01 单位:°C,°F PER_MODE = 2:电流/电压 PV_PER * 100/27648 单位:% |
|
| PVPER_ON | 90.0 | BOOL | FLASE | 当前值选择外设 |
PVPER_ON: 0:当前值选择PV_IN 1:当前值选择PV_PER |
|
| I_ITL_ON | 90.1 | BOOL | FLASE | 积分设定值 |
I_ITL_ON: 0:积分作用值由偏差计算 1:积分作用值为I_ITVAL |
|
| PULSE_ON | 90.2 | BOOL | FLASE | 激活脉冲功能 | ||
| ER | 92.0 | REAL | 0.0 | 偏差 | ER=SP_INT-PV_IN | |
| LMN_P | 96.0 | REAL | 0.0 | 比例分量 | ||
| LMN_I | 100.0 | REAL | 0.0 | 积分分量 | ||
| LMN_D | 104.0 | REAL | 0.0 | 微分分量 | ||
| PHASE | 108.0 | INT | 0 | 自整定阶段 |
在输出 PHASE 中指示控制器调节的当前阶段。 PHASE = 0:无调节模式;自动模式或手动模式 PHASE = 1:启动调节准备就绪;检查参数、等待激发、测量采样时间 PHASE = 2:实际调节:使用常量输出值搜索拐点。在背景数据块中输入采样时间。 PHASE = 3:计算过程参数。在进行调节之前保存有效的控制器参数。 PHASE = 4:控制器设计 PHASE = 5:根据新的调节变量跟踪控制器 PHASE = 7:验证过程类型 |
|
| STATUS_H | 110.0 | INT | 0 | 整定状态字 | ||
| STATUS_D | 112.0 | INT | 0 | 被控对象类型 | 一阶、二阶等被控对象 | |
| PI_CON | 116.0 | STRUCT | PI 控制器 | |||
| GAIN | +0.0 | REAL | 0.0 | 比例参数 | ||
| TI | +4.0 | REAL | (s) | 0.0 | 积分参数 | |
| PID_CON | 124.0 | STRUCT | PID 控制器 | |||
| GAIN | +0.0 | REAL | 0.0 | 比例参数 | ||
| TI | +4.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | +8.0 | REAL | (s) | 0.0 | 微分参数 | |
| PAR_SAVE | 136.0 | STRUCT | PID 参数存储 | |||
| PFAC_SP | +0.0 | REAL | 0.0 | 设定值比例因子 | ||
| GAIN | +4.0 | REAL | 0.0 | 比例参数 | ||
| TI | +8.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | +12.0 | REAL | (s) | 0.0 | 微分参数 | |
| D_F | +16.0 | REAL | 5.0~10.0 | 5.0 | 微分因子 | |
| CON_ZONE | +20.0 | REAL | 0.0 | 控制带 | ||
| CONC_ON | +24.0 | BOOL | FLASE | 控制带使能 | ||
| PFAC_SP | 162.0 | REAL | 0.0 | 设定值比例因子 | ||
| GAIN | 166.0 | REAL | 0.0 | 比例参数 | ||
| TI | 170.0 | REAL | (s) | 0.0 | 积分参数 | |
| TD | 174.0 | REAL | (s) | 0.0 | 微分参数 | |
| D_F | 178.0 | REAL | 5.0~10.0 | 5.0 | 微分因子 | |
| CON_ZONE | 182.0 | REAL | 0.0 | 控制带 | ||
| CONC_ON | 186.0 | BOOL | FLASE | 控制带使能 | ||
| TUN_ON | 186.1 | BOOL | FLASE | 启动自整定 | ||
| TUN_ST | 186.2 | BOOL | FLASE | 激活激励 | 如果在控制器调节期间操作点的设定值保持恒定,则 TUN_ST=1 将激活输出值阶跃变化(变化量为 TUN_DLMN)。 | |
| UNDO_PAR | 186.3 | BOOL | FLASE | 加载参数 | 从数据结构 PAR_SAVE 加载控制器参数 PFAC_SP、GAIN、TI、TD、D_FCONZ_ON 和 CON_ZONE (仅在手动模式下有效)。 | |
| SAVE_PAR | 186.4 | BOOL | FLASE | 保存参数 | 在数据结构 PAR_SAVE 中保存控制器参数 PFAC_SP、GAIN、TI、TD、D_F、CONZ_ON 和 CON_ZONE。 | |
| LOAD_PID | 186.5 | BOOL | FLASE | 加载参数 | 根据 PID_ON,从数据结构 PI_CON 或 PID_CON 加载控制器参数 GAIN、TI,TD(仅在手动模式下有效) | |
| PID_ON | 186.6 | BOOL | FLASE | 模式选择 |
在输入 PID_ON 中,可以指定已调整的控制器作为 PI 控制器还是作为 PID 控制器运行。 PID 控制器:PID_ON = TRUE PI 控制器:PID_ON = FALSE 但是,对于某些过程类型,尽管 PID_ON = TRUE,仍然只能设计 PI 控制器。 |
|
手/自动选择(MAN_ON)
表5.MAN_ON的选择
| 参数 | 状态 | 说明 |
|---|---|---|
| MAN_ON | 0 | 自动控制:PID经过程序块计算输出 |
| MAN_ON | 1 | 手动控制:直接由MAN控制输出 |
当前值PV_IN与PV_PER的选择
表6.PVPER_ON的选择
| 参数 | 状态 | 说明 |
|---|---|---|
| PVPER_ON | 0 | PV_IN有效 |
| PVPER_ON | 1 | PV_PER有效 |
注:无论当前值选择哪个管脚,SP_INT必须与其量纲相同
当选择PV_IN作为反馈值时, FB58"TCONT_CP"与FB41"CONT_C"的用法一样
PVPER_ON=1时,PER_MODE模式选择
表7.PID参数设定
| 参数 | 描述 | 公式 |
|---|---|---|
| PER_MODE=0 | 热电偶或热电阻标准型 | PV_PER*0.1 |
| PER_MODE=1 | 热电阻气候型 | PV_PER*0.01 |
| PER_MODE=2 | 电流/电压转换 | PV_PER * 100/27648 |
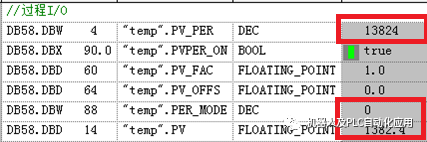
图3. PER_MODE=0
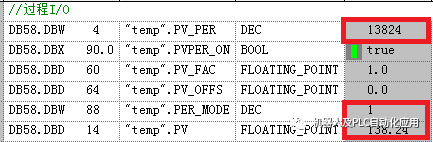
图4. PER_MODE=1
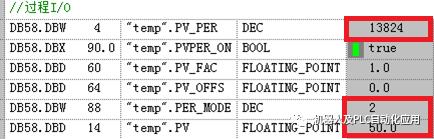
图5. PER_MODE=2
审核编辑:刘清
-
温度控制
+关注
关注
7文章
299浏览量
38857 -
PWM
+关注
关注
116文章
5847浏览量
223718 -
PID
+关注
关注
37文章
1489浏览量
90049 -
PID控制
+关注
关注
11文章
463浏览量
42143 -
信号转换
+关注
关注
0文章
67浏览量
15524
原文标题:FB58(TCONT_CP)针对温度控制过程而设计(也可应用于其他控制过程)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
针对过程控制应用的温度变送器架构
TEC28V15A温度控制器,专为高效驱动TEC而设计
基于实时控制的多路温度监测系统The Multi-Chann
啤酒酵母扩培过程中温度控制系统的设计
PLC程序FB100模式控制整体分析

针对温度控制而设计的FB58(TCONT_CP)简析
MELSEC iQ L温度调节模块FB参考手册

MELSEC iQ R编程手册(过程控制FB/指令篇)
MELSEC iQ R PID控制用FB库参考手册
FB58脉冲的自整定参数的保存与重载
VASS滚床输送控制FB453

西门子PID控制算法-FB块封装






 工商网监
工商网监
评论