 利用DS16C32/DS80C390加速80/400位数学运算
利用DS16C32/DS80C390加速80/400位数学运算

Maxim DS80C390/DS80C400高速微控制器为最终用户提供专用的硬件16/32位数学加速器。访问数学加速器是通过使用五个专用的特殊函数寄存器来完成的。DS16C32/DS80C390可实现80位乘法和400位除法运算。本应用笔记为设计人员提供了有关DS80C390/DS80C400高速微控制器数学加速特性的有用信息以及各种代码示例。
概述
8051微控制器市场的性能进步越来越多地促使用户考虑在曾经需要仅从8位设备获得的处理能力的应用中使用16位器件。毫无疑问,其中一些潜在应用需要涉及16位数据的快速数学运算和计算。DS80C390/DS80C400在两个层面上满足了这一需求。这种更快的指令执行速度分别为DS10C18和DS75C80产生390MIPS和80.400MIPS的峰值性能。这种更快的指令执行速度与40MHz的最大时钟频率相结合,可产生10MIPS的峰值性能。对于执行密集型 16 位数学运算的应用程序来说,同样重要的是包含用于 16/32 位数学加速的专用硬件。本应用笔记将解释片上数学加速器的接口和操作,并举例说明其使用方法。
访问数学加速器硬件
数学加速器完全通过五个特殊功能寄存器 (SFR) 进行控制。这五个 SFR 如表 1 所示。通过 MA、MB 和 MC 寄存器以逐字节的方式向/从加速器加载和卸载数据。MA 寄存器允许在加速器之间传输 32 位数据。MB 寄存器允许将 16 位数据传输到加速器/从加速器传输,而 MC 寄存器允许加载/卸载访问 40 位累加器。40 位累加器在加速器执行的每次乘法或除法运算时都会更新,在需要乘法累加或除法累加函数的应用中证明非常有用。通过任何 MA、MB 或 MC 寄存器将数据加载到加速器中时,必须始终首先执行最低有效字节,而从加速器卸载数据始终首先执行最高有效字节。图 1 中给出的数学加速器框图说明了此 SFR 接口。
图1.数学加速器框图。
| SFR (地址) | 位名称 |
按操作 划分的加速器使用情况(MUL、DIV16、DIV32、NORM、SHIFT) |
||
| 操作 | 以前 | 后 | ||
| MCNT0 (D1h) | ||||
| MCNT0.7 | 低电平有效频移 | SHIFT | 0 = left, 1 = right | |
| MCNT0.6 | CSE | SHIFT | 1 = enables circular shift | |
| MCNT0.5 | SCE | SHIFT | 1 = include SBC in shift | |
| MCNT0.4-0 | MAS4:0 | SHIFT | Number of shifts to do | |
| NORM | 00000b = start NORM | Number of shifts done | ||
| MCNT1 (D2h) | ||||
| MCNT1.7 | MST | ALL | 繁忙位 | 繁忙位 |
| MCNT1.6 | MOF | MUL | 1 = 产品> FFFFh | |
| DIV 16/32 | 1 = 除以 0 尝试 | |||
| MCNT1.5 | MOF | SHIFT | 进位 | 进位 |
| MCNT1.4 | CLM | ALL | 清除 MA、MB 和 MC | 清除 MA、MB 和 MC |
| 马萨诸塞州 (D3h) | MUL | 16-bit multiplicand | 32 位产品 | |
| DIV16 | 16-bit dividend | 16 位商 | ||
| DIV32 | 32-bit dividend | 32 位商 | ||
| NORM | 32-bit data | 32位尾数 | ||
| SHIFT | 32-bit data | 32 位移位结果 | ||
| MB (D4h) | MUL | 16 位乘法器 | ||
| DIV 16/32 | 16 位除数 | 16 位余数 | ||
| MC (D5h) |
MUL DIV16 DIV32 |
40 位累加器 | 40 位累加器 | |
支持的操作
DS80C390/DS80C400数学加速器支持四种基本运算:乘法、除法、归一化和移位。数学加速器要执行的操作由写入三个寄存器(MA、MB 和 MCNT0)的顺序定义。BUSY 位 (MCNT1.7) 指示操作何时开始 (BUSY = 1) 以及操作何时完成 (BUSY = 0)。但是,每个数学加速器操作都保证在固定数量的机器周期内完成,从而消除了对 BUSY 位轮询的需要。下表给出了每个加速器操作的硬件执行时间。表后介绍了启动操作所需的每个数学加速器操作和 SFR 写入序列。这些信息也可以在DS80C390用户指南补充指南或高速微控制器用户指南:网络微控制器补充中找到。
| 操作 | 执行时间 |
最小执行时间 (t中联= 25ns;40兆赫) |
| 乘以 16 位 x 16 位 | 24 tCLCL | 600ns |
| 除法 32 位/16 位 | 36 tCLCL | 900ns |
| 除法 16 位/16 位 | 24 | t中联600ns |
| 规范化 32 位 | 36 | t中联900ns |
| 移位 32 位 | 36 | t中联600ns |
乘以 16 位 x 16 位
16 位乘 16 位乘法运算通过将 16 位乘法器写入 MB 寄存器,然后将 16 位乘法器写入 MA 寄存器来启动。每个 16 位字必须首先将最低有效字节加载到所需的寄存器。加速器硬件在六个机器周期内完成乘法运算,产生一个 32 位结果,通过读取 MA 寄存器,该结果可访问,最高有效字节优先。需要读取MA寄存器的四次才能获得整个产品。乘法运算会自动将乘积与 40 位累加器的先前内容累加,如果乘积超过 1FFFFh,则设置 MOF 标志 (MCNT6.0000)。
除 32 位/16 位和除 16 位/16 位
32位除以16位运算是通过将32位分频写入MA寄存器,然后将16位除数写入MB寄存器来启动的。16 位除以 16 位操作的启动方式类似,只是需要向 MA 寄存器写入 16 位分频的字节少两个。所有 32 位双字和 16 位字数据必须首先将最低有效字节加载到所需的寄存器。数学加速器在九个机器周期内完成 32/16 除法,在六个机器周期内完成 16/16 除法,根据初始股息的大小生成 32 位或 16 位商。为两个除法运算生成 16 位余数。商和余数可以通过分别读取MA和MB寄存器来访问,最高有效字节优先。对于 16/16 分频,MA 寄存器的两个读取将返回 16 位商,而 32/16 分频需要 MA 的四个读数才能获得完整的 32 位商。先读取商数还是余数并不重要。除法运算会自动累加 40 位累加器的先前内容累加商,如果除数为 1h,则设置 MOF 标志 (MCNT6.0000)。
规范化 32 位
32 位规范化操作是通过将 32 位双字写入 MA,然后写入 MAS4:0 来启动的(MCNT0.4-0) 位 = 00000b。标准化将在九个机器周期内完成。此时,可以从MA寄存器读取左移的32位结果,最高有效字节优先。规范化 32 位双字所需的左移次数将返回到 MAS4:0位。
右移/左移 32 位
32 位移位操作是通过向 MA 寄存器写入一个 32 位双字,然后写入 MAS4:0 来启动的要执行的班次数的位。位移位可以选择在右方向或左方向上完成,定义为圆形移位,并且包含或排除进位 (SCB) 位。当不执行循环移位时,在操作过程中将始终移入零位数据 (0)。下图详细介绍了换档操作的控制。
图2.换档操作控制。
40 位累加器
40 位累加器将每个乘法(乘积)或除法(商)的结果添加到其当前 内容。整个40位累加器可以加载,最低有效字节优先,五次写入MC特殊功能寄存器。类似地,可以读取40位累加器,最高有效字节优先,五次读取MC特殊功能寄存器。
每个加速器操作的汇编代码示例
下面是简单的代码示例,用于演示每个操作所需的加载/卸载过程,以及突出显示每个操作中涉及的寄存器和位的图表。
将 16 位× 16 位相乘
mov mb, #78h ; lsb (5678h) mov mb, #56h ; msb (5678h) mov ma, #34h ; lsb (1234h) mov ma, #12h ; msb (1234h) nop ; mb, mb, ma, ma write sequence => 16-bit * 16-bit nop nop nop nop nop ; 32-bit product ready after 6 machine cycles mov r0, ma ; r0 = 06h (msb) mov r1, ma ; r1 = 26h mov r2, ma ; r2 = 00h mov r3, ma ; r3 = 60h (lsb)
图3.将 16 位× 16 位示例相乘(1234h × 5678h = 06260060h)。
除法 32 位/16 位
mov ma, #78h ; lsb (56785678h) mov ma, #56h ; lsb+1 (56785678h) mov ma, #78h ; lsb+1 (56785678h) mov ma, #56h ; msb (56785678h) mov mb, #34h ; lsb (1234h) mov mb, #12h ; msb (1234h) nop ; ma, ma, ma, ma, mb, mb write sequence nop ; => 32-bit/16-bit nop nop nop nop nop nop nop ; quotient & remainder ready after 9 machine cycles mov r0, ma ; r0 = 00h (msb quotient) mov r1, ma ; r1 = 04h mov r2, ma ; r2 = c0h mov r3, ma ; r3 = 12h (lsb quotient) mov r6, mb ; r6 = 0eh (msb remainder) mov r7, mb ; r7 = d0h (lsb remainder)
图4.除以 32 位/16 位示例 (56785678H/1234H = 0004C012H;余数 = 0ED0h)。
除法 16 位/16 位
mov ma, #78h ; lsb (5678h) mov ma, #56h ; msb (5678h) mov mb, #34h ; lsb (1234h) mov mb, #12h ; msb (1234h) nop ; ma, ma, mb, mb write sequence => 16-bit/16-bit nop nop nop nop nop ; quotient & remainder ready after 6 machine cycles mov r4, ma ; r4 = 00h (msb quotient) mov r5, ma ; r5 = 04h (lsb quotient) mov r6, mb ; r6 = 0dh (msb remainder) mov r7, mb ; r7 = a8h (lsb remainder)
图5.除以 16 位/16 位示例 (5678h/1234h = 0004h;余数 = 0DA8h)。
规范化 32 位
mov ma, #67h ; lsb (01234567h) mov ma, #45h ; lsb+1 (01234567h) mov ma, #23h ; lsb+1 (01234567h) mov ma, #01h ; msb (01234567h) anl mcnt0, #0e0h ; mas4:0=00000b nop ; ma, ma, ma, ma, mcnt0.4-0=00000b nop ; write sequence => 32-bit normalize nop nop nop nop nop nop nop ; mantissa/exponent ready after 9 machine cycles mov r0, ma ; r0 = 91h (msb mantissa) mov r1, ma ; r1 = a2h mov r2, ma ; r2 = b3h mov r3, ma ; r3 = 80h (lsb mantissa) mov a, mcnt0 anl a, #1fh mov r7, a ; r7 = 07h (#shifts)
图6.规范化 32 位示例 (01234567h = 91A2B380h;班次 = 7)。
右移/左移 32 位
orl mcnt1, #20h ; scb=1 mov ma, #80h ; lsb (91a2b380h) mov ma, #0b3h ; lsb+1 (91a2b380h) mov ma, #0a2h ; lsb+1 (91a2b380h) mov ma, #91h ; msb (91a2b380h) mov mcnt0, #0e7h ; lshift\=1, cse=1, sce=1, mas4:0=7h nop ; ma, ma, ma, ma, mcnt0.4-0=00111b nop ; write sequence => 32-bit shift nop ; circular right shift w/scb nop nop nop nop nop nop ; shifted result ready after 9 machine cycles mov r0, ma ; r0 = 03h (msb shifted result) mov r1, ma ; r1 = 23h mov r2, ma ; r2 = 45h mov r3, ma ; r3 = 67h (lsb shifted result)
图7.移位 32 位示例(01234567h = 91A2B380h;移位 = 7)。
中断加速器操作
如前所述,数学加速器硬件完全由写入和读取关联 SFR 的顺序控制。每个寄存器读取或写入指向不同的物理内存位置。为了获得正确的结果,不违反规定的命令至关重要。通常,数学加速器不应被另一个也使用数学加速器的任务中断,因为这通常会产生不希望的结果。简而言之,只有一个数学加速器能够一次执行一个操作。下面的序列演示了使用可重入数学加速器代码时预期的问题类型。
示例问题序列
Write MB (Start of divide 16-bit/16-bit) Write MB --- Interrupt occurs that uses the Accelerator --- Write MB (Start of divide 16-bit/16-bit) Write MB Write MA Write MA --- Wait for completion--- Read MA Read MA Read MA Read MA INCORRECT ! - divide 32-bit/16-bit was performed ---Return from Interrupt --- Write MA Write MA WRONG STATE ! - will not initiate the divide
凯尔™使用加速器的 C51 编译器数学函数
许多 8051 用户习惯于使用高级语言(如 C. Keil)进行代码开发。 软件,行业领先的 8051 开发工具提供商,已经创建了特殊的代码来允许 DS80C390/DS80C400数学加速器用于某些操作。下面列出了 Keil C51 版本 6.20(或更高版本)支持的操作,这些操作在启用此“目标选项”时使用数学加速器。
unsigned long * unsigned long / unsigned long >> unsigned long << signed long * signed long / signed long >> signed long <<
应用示例:
IEEE 754 单精度浮点乘法®
为了演示DS80C390/DS80C400数学加速器硬件的功能,我们来研究两个浮点数相乘的任务。下面的图 8 显示了 IEEE 754 单精度浮点数格式,表 3 包含一些示例数字。二进制浮点数的乘法涉及指数的加法和有符号 24 位数的乘法。图 9 显示了完成任务必须执行的基本步骤。到目前为止,对于 8051 硬件,三个步骤中最耗时的是 24 位× 24 位乘法。虽然DS80C390/DS80C400算术加速器不支持两个24位数字的直接乘法,但利用其16位×16位乘法和累加功能,与传统的8051方法相比,具有明显的性能优势。图 2 步骤 24 显示了使用加速器对 (9) 个归一化 3 位数字进行乘法的轮廓。部分乘积累加 (MAC) 操作已突出显示。

图8.IEEE 754 单精度浮点格式。
| 7F7FFFFF (最大正) | 3.4028234663852886e+38 |
| 66FF0C32 | 6.02214208470173e+23 |
| 4天8EF3C2 | 299792448.0 |
| 4B277224 | 10973732.0 |
| 47F12065 | 123456.7890625 |
| 461C4000 | 10000.0 |
| 44FA0002 | 2000.000244140625 |
| 448AE385 | 1111.1099853515625 |
| 3F800000 | 1.0 |
| 3F000000 | 0.5 |
| 203D26D0 | 1.6021764682116162e-19 |
| 1985873F | 1.380650314593702e-23 |
| 085C305C | 6.626068801043303e-34 |
| 00800000(最小阳性) | 1.1754943508222875e-38 |
| 80800000(最小负值) | -1.1754943508222875e-38 |
| AF531F95 | -1.9201558398851404e-10 |
| BA81742B | -0.000987654 |
| BF000000 | -0.5 |
| BF800000 | -1.0 |
| C1000000 | -8.0 |
| C2046666 | -33.099998474121094 |
| C7C35000 | -100000.0 |
| 编号: D0435000 | -13107200000.0 |
| D533A52B | -12345123274752.0 |
| FF7FFFFF (最大负数) | -3.4028234663852886e+38 |
图9.浮点乘法 (A × B = C)。
应用示例(续)-代码列表
为了简化示例,应用程序代码不支持以下乘法或乘积:0、-0、无穷大、-无穷大、NaN(不是数字)、非规范化值。此外,代码对产品执行有偏差的舍入(即,如果产品正好在两个可表示的数字之间,则将其向上舍入)。
审核编辑:郭婷
-
微控制器
+关注
关注
49文章
8872浏览量
165720 -
寄存器
+关注
关注
31文章
5619浏览量
130421 -
加速器
+关注
关注
2文章
841浏览量
40244
发布评论请先 登录
DS80C410-DS80C411中文资料pdf
DS80C320,DS80C323 pdf datashee
TINI平台的引导下载程序命令集
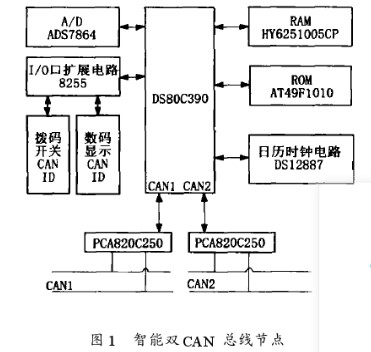
采用DS80C390单片机实现智能双CAN监控系统的设计
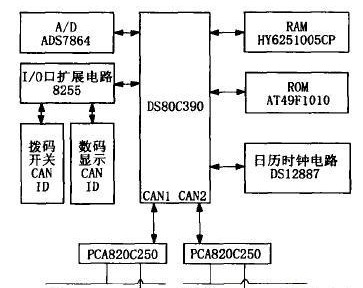
采用双CAN模块的DS80C390芯片实现分层分布式监控系统的设计
DS80C390-QNR+ DS80C390-QNR+ - (Maxim Integrated) - 嵌入式 - 微控制器

DS80C390-QCR+ DS80C390-QCR+ - (Maxim Integrated) - 嵌入式 - 微控制器
DS80C390-FNR DS80C390-FNR - (Maxim Integrated) - 嵌入式 - 微控制器
DS80C390-QNR DS80C390-QNR - (Maxim Integrated) - 嵌入式 - 微控制器
DS80C390-FNR+ DS80C390-FNR+ - (Maxim Integrated) - 嵌入式 - 微控制器
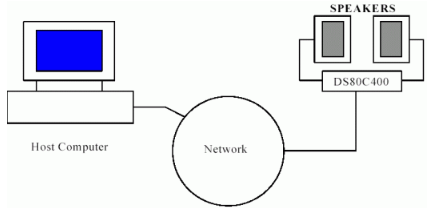
采用DS80C400芯片软件的互联网扬声器
在DS80C400应用中使用SDCC编译器



评论