 Free RTOS的信息队列
Free RTOS的信息队列

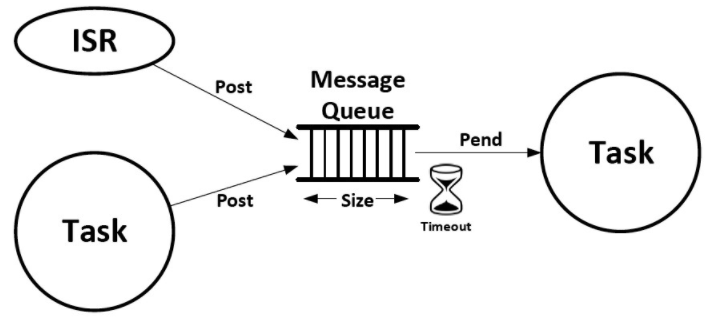
队列用于在任务之间以及任务与中断之间传递数据,可以在调度程序启动之前或之后创建队列。
配置相关资源
#define configSUPPORT_DYNAMIC_ALLOCATION 1
创建信息队列
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength,
UBaseType_t uxItemSize );
参数:
uxQueueLength:正在创建的队列在任何时候可以容纳的最大项数
uxItemSize:可以存储在队列中的每个数据项的大小(以字节为单位)
返回值:
创建失败返回NULL,创建成功返回句柄
发送信息
BaseType_t xQueueSend( QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait );
参数:
xQueue:数据被发送(写入)到的队列的句柄
pvItemToQueue:一个指向要复制到队列中的数据的指针
xTicksToWait:当队列已经满时,任务保持阻塞状态以等待队列上的空间可用的最大时间
返回值:
成功返回pdPASS,失败返回errQUEUE_FULL
接收信息
BaseType_t xQueueReceive( QueueHandle_t xQueue,
void*pvBuffer,
TickType_txTicksToWait );
参数:
xQueue:从其接收数据(读)的队列的句柄
pvBuffer:一个指向内存的指针,接收到的数据将被复制到其中
xTicksToWait:任务保持阻塞状态以等待队列上的数据可用的最大时间,如果队列已经为空
返回值:
成功返回pdPASS,失败返回errQUEUE_FULL
注意:更多API函数请参阅官方相关文档
简单程序
#include "stm32f10x.h"
#include
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE); //开启时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //设置推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化GPIO
GPIO_SetBits(GPIOC,GPIO_Pin_0|GPIO_Pin_1); //将LED端口拉高,熄灭LED
}
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD;//下拉输入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3|GPIO_Pin_2|GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStructure);
}
void USART_init(uint32_t bound)
{
GPIO_InitTypeDef GPIO_InitStruct; //定义GPIO结构体变量
USART_InitTypeDef USART_InitStruct; //定义串口结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE); //使能GPIOC的时钟
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; //配置TX引脚
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //配置PA9为复用推挽输出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA9速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10; //配置RX引脚
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //配置PA10为浮空输入
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA10速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数
USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; //发送接收模式
USART_InitStruct.USART_Parity=USART_Parity_No; //无奇偶校验
USART_InitStruct.USART_BaudRate=bound; //波特率
USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位1位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字长8位
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //无硬件数据流控制
USART_Init(USART1,&USART_InitStruct); //串口初始化函数
USART_Cmd(USART1,ENABLE); //使能USART1
}
int fputc(int ch,FILE *f) //printf重定向函数
{
USART_SendData(USART1,(uint8_t)ch); //发送一字节数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET); //等待发送完成
return ch;
}
#define START_TASK_PRIO 1 //任务优先级
#define START_STK_SIZE 128 //任务堆栈大小
TaskHandle_t StartTask_Handler; //任务句柄
void Start_Task(void *pvParameters);//任务函数
#define Sen_TASK_PRIO 2 //任务优先级
#define Sen_STK_SIZE 50 //任务堆栈大小
TaskHandle_t SenTask_Handler; //任务句柄
void Sen_Task(void *p_arg); //任务函数
#define Queue_TASK_PRIO 3 //任务优先级
#define Queue_STK_SIZE 50 //任务堆栈大小
TaskHandle_t QueueTask_Handler; //任务句柄
void Queue_Task(void *p_arg); //任务函数
QueueHandle_t xQueue = NULL;
int main( void )
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); //设置系统中断优先级分组 4
LED_Init(); //初始化 LED
KEY_Init();
USART_init(9600);
//创建开始任务
xTaskCreate(
(TaskFunction_t )Start_Task, //任务函数
(const char* )"Start_Task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler //任务句柄
);
vTaskStartScheduler(); //开启调度
}
//开始任务函数
void Start_Task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建一个队列
xQueue = xQueueCreate( 1, sizeof(u8) );
if( xQueue != NULL )
{
printf("创建成功n");
}
//创建 Sen 任务
xTaskCreate(
(TaskFunction_t )Sen_Task,
(const char* )"Sen_Task",
(uint16_t )Sen_STK_SIZE,
(void* )NULL,
(UBaseType_t )Sen_TASK_PRIO,
(TaskHandle_t* )&SenTask_Handler
);
//创建 Queue 任务
xTaskCreate(
(TaskFunction_t )Queue_Task,
(const char* )"Queue_Task",
(uint16_t )Queue_STK_SIZE,
(void* )NULL,
(UBaseType_t )Queue_TASK_PRIO,
(TaskHandle_t* )&QueueTask_Handler
);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//Sen 任务函数
void Sen_Task(void *pvParameters)
{
u8 Key = 0;
while(1)
{
if( Key < 10 )
{
Key++;
}
else
{
Key = 0;
}
if( xQueue != NULL )
{
xQueueSend( ( QueueHandle_t ) xQueue, //数据被发送(写入)到的队列的句柄
( void * ) &Key, //一个指向要复制到队列中的数据的指针
( TickType_t ) portMAX_DELAY ); //当队列已经满时,任务保持阻塞状态以等待队列上的空间可用的最大时间
}
vTaskDelay(1000);
}
}
//Queue 任务函数
void Queue_Task(void *pvParameters)
{
u8 Key_Receive = 0;
while(1)
{
xQueueReceive( ( QueueHandle_t ) xQueue,
( void * ) &Key_Receive,
( TickType_t ) portMAX_DELAY );
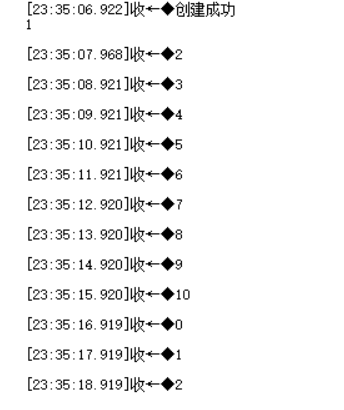
printf("%dn",Key_Receive);
vTaskDelay(500);
}
}
实验效果
--END--
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
程序
+关注
关注
117文章
3847浏览量
85455 -
队列
+关注
关注
1文章
46浏览量
11254 -
传递数据
+关注
关注
0文章
3浏览量
6319
发布评论请先 登录
相关推荐
热点推荐
【RA-Eco-RA2E1-48PIN-V1.0开发板试用】尝试嵌入式操作系统Free-RTOS
本篇分享我们尝试嵌入式操作系统Free-RTOS
首先新建一个Free-RTOS项目。
现在使用IDE建立嵌入式操作系统可太简单了,遥想当年,还要自己动手移植,那叫一个难。。。
设置P103
发表于 11-14 23:08
【MiCOKit试用体验】庆科MiCO系统篇(4)MiCO RTOS消息队列
本帖最后由 gjianw217 于 2015-10-25 15:50 编辑
在本帖子中,主要分析一下庆科MiCO RTOS的消息队列,具体包括:OS消息队列MiCO消息队列关键A
发表于 10-24 17:03
CC3200 可以使用 ccs TI-RTOS 和 iar FREE-RTOS,为什么要有两个OS,他们有什么区别?
本帖最后由 一只耳朵怪 于 2018-6-7 15:32 编辑
请教一下TI的工程师, CC3200 可以使用ccs TI-RTOS 和 iar FREE-RTOS。1、为什么要有两个OS
发表于 06-07 02:34
在FREE-RTOS中怎样使用simplelink api函数
您好:
我现在正在学习cc3200 FREE_RTOS系统demo。请问我想在启动线程函数之前使用 “文件操作系统的API函数” ,读取flash的一些参数,请问我应该怎么操作?
发表于 06-21 08:04
RTT有类似UCOS,或者FREE RTOS这类的移植方法吗?
的操作把难度为3的操作,降低为难度1. 网上一堆工具使用教程,也都是基于自身已经了解很多基础知识上再写的. RTT难道就没有类似UCOS,或者FREE RTOS这类的移植方法?
发表于 01-21 06:20
Free RTOS移植问题的解决办法?
按照原子哥的free rtos抑制说明文档做第一个工程,改完代码编译出现xPortSysTickHandler()函数未定义,头文件中加入task.h和FreeRTOS.h。实在找不出问题所在,,,there must be anther problem???
发表于 06-11 07:57
Small RTOS 的设计思想及消息队列通信机制的应用
将Small RTOS 多任务的思想应用在一个具体的单片机控制的电子式存包柜系统的软件设计中,介绍了基于消息队列的任务通讯的编程方法。
发表于 04-23 06:22
了解一下RTOS消息队列的应用
基于RTOS的应用中,通常使用队列机制实现任务间的数据交互,一个应用程序可以有任意数量的消息队列,每个消息队列都有自己的用途。
什么是消息队列
发表于 06-12 14:17
实时操作系统Free RTOS的详细介绍
实时操作系统Free RTOS 简介 FreeRTOS是一个迷你的实时操作系统内核。作为一个轻量级的操作系统,功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程等
发表于 06-21 14:30
•7328次阅读
RTOS消息队列的多种用途
消息队列可以以多种不同的方式使用。事实上,您可以编写可能只使用消息队列的相当复杂的应用程序。仅使用消息队列可以减少代码的大小(即占用空间),因为可以模拟许多其他服务(信号量、时间延迟和事件标志)。
RTOS消息队列的应用
基于RTOS的应用中,通常使用队列机制实现任务间的数据交互,一个应用程序可以有任意数量的消息队列,每个消息队列都有自己的用途。
发表于 05-29 10:49
•1188次阅读




评论