 【产品应用】AWorksLP 样例详解(MR6450)—— HWTimer
【产品应用】AWorksLP 样例详解(MR6450)—— HWTimer

 简介
简介延时型硬件定时器: 由硬件定时器外设提供的延时功能。
计数型硬件定时器: 提供较精确的类似时间戳的功能。
周期型硬件定时器: 可设置中断频率的计数器,不仅能提供计数器的功能,也能根据中断频率提供更精确的定时。
输入捕获定时器: 可测量脉冲宽度或者测量频率。
接口介绍使用样例/**
* rief 硬件定时器中断服务函数。
* param[in] p_arg : 任务参数
*/
static void mytimer_isr (void *p_arg)
{
aw_gpio_toggle((int)p_arg);
aw_kprintf("enter isr
");
}
/**
* rief hwtimer 测试函数
*/
aw_local void* __task_handle (void *arg)
{
int fd;
aw_err_t ret;
uint32_t count = 5;
aw_hwtimer_rate_t p_intr_freq;
p_intr_freq.rate_denominator = 5;
p_intr_freq.rate_numerator = 1;
fd = aw_open(CONFIG_DEMO_HWTIMER_PEROID_DEV_NAME, AW_O_RDWR, 0);
if (fd < 0) {
aw_kprintf("hwtimer open failed:%d
", fd);
while(1);
}
ret = aw_hwtimer_period_intr_freq_set_frac(fd, &p_intr_freq);
while (count) {
aw_hwtimer_period_wait(fd, 500);
mytimer_isr(arg);
count --;
}
// 配置每秒中断2次
ret = aw_hwtimer_period_intr_freq_set(fd, 2);
ret = aw_hwtimer_period_start(fd);
if (ret != AW_OK) {
aw_kprintf("Timer allocation fail!
");
}
ret = aw_hwtimer_period_wait(fd, AW_WAIT_FOREVER);
while (1) {
aw_hwtimer_period_wait(fd, AW_WAIT_FOREVER);
mytimer_isr(arg);
}
for (;;) {
aw_mdelay(1000);
}
aw_close(fd);
return 0;
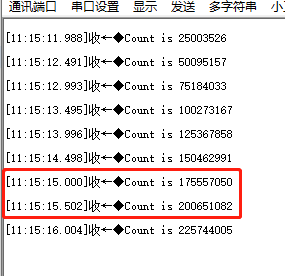
}下表为使用硬件周期型定时器,在中断中进行引脚翻转,通过逻辑分析仪所测量出的实际数据,在使用设计时可作为部分参考依据。

aw_local void* __task_handle (void *arg)
{
uint32_t count = 0;
int fd, led_fd;
int ret;
uint32_t start_count;
fd = aw_open(CONFIG_DEMO_HWTIMER_PEROID_DEV_NAME, AW_O_RDWR, 0);
if (fd < 0) {
aw_kprintf("hwtimer open fail! :%d
",fd);
return;
}
/* 打开设备会点亮LED */
led_fd = aw_open("/dev/led_run", AW_O_RDWR, 0);
if (led_fd < 0) {
aw_kprintf("led open fail! :%d
", led_fd);
aw_close(fd);
return;
}
ret = aw_hwtimer_count_rate_get(fd, &start_count);
if (ret != AW_OK) {
aw_kprintf("Timer count rate get fail!
");
aw_close(fd);
aw_close(led_fd);
return;
}
// 设置时钟频率
ret = aw_hwtimer_count_rate_set(fd, start_count/2);
if (ret != AW_OK) {
aw_kprintf("Timer count rate set fail!
");
aw_close(fd);
aw_close(led_fd);
return;
}
ret = aw_hwtimer_count_start(fd);
if (ret != AW_OK) {
aw_kprintf("Timer start fail!
");
aw_close(fd);
aw_close(led_fd);
return;
}
for (;;) {
aw_led_toggle(led_fd);
aw_mdelay(500);
aw_led_toggle(led_fd);
aw_hwtimer_count_get(fd, &count);
aw_kprintf("Count is %d
", count);
}
aw_close(fd);
aw_close(led_fd);
return 0;
}

aw_local void* __task_handle (void *arg)
{
int i;
int fd;
aw_err_t ret;
aw_timespec_t timespec;
aw_timestamp_t start_timestamp, stop_timestamp;
aw_timestamp_freq_t timestamp_freq;
uint64_t delay_ns, diff;
uint32_t ns_numerator = 1000000000;
timestamp_freq = aw_timestamp_freq_get();
while (0 == (timestamp_freq % 10)) {
timestamp_freq /= 10;
ns_numerator /= 10;
}
fd = aw_open(CONFIG_DEMO_HWTIMER_DELAY_DEV_NAME, AW_O_RDWR, 0);
if (fd < 0) {
aw_kprintf("hwtimer open failed:%d
", fd);
while(1);
}
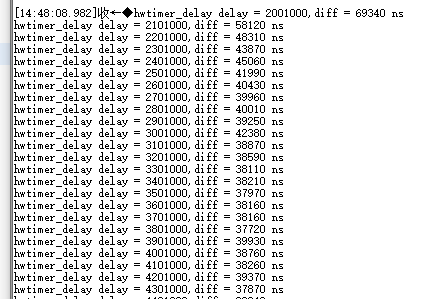
delay_ns = 2001000;
for (i = 0; i < 100; i++) {
timespec.tv_sec = delay_ns / 1000000000u;
timespec.tv_nsec = (uint32_t)(delay_ns % 1000000000u);
start_timestamp = aw_timestamp_get();
ret = aw_hwtimer_delay(fd, ×pec);
if (ret !=AW_OK) {
aw_kprintf("hwtimer delay failed:%d
", ret);
}
aw_barrier();
stop_timestamp = aw_timestamp_get();
stop_timestamp -= start_timestamp;
diff = stop_timestamp;
diff *= ns_numerator;
diff /= timestamp_freq;
diff = diff - delay_ns;
aw_kprintf(
"hwtimer_delay delay = %u,diff = %u ns
",
(uint32_t)delay_ns,
(uint32_t)diff);
delay_ns += 100000;
}
aw_close(fd);
return 0;
}
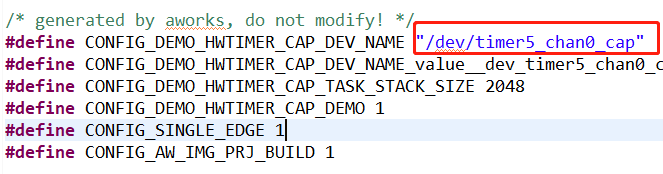
{SDK}demosperipheralcap路径下为捕获型定时器例程,例程关键代码如下:
/* 单边沿触发*/
static void test_cap_single_edge(
int fd,
int gpio_cap,
uint32_t ms,
aw_hwtimer_cap_config_t *p_config,
int is_rising)
{
uint64_t cap_val1, cap_val2;
aw_err_t ret;
// 制造两次上升沿
mk_edge(gpio_cap, 5);
aw_task_delay(ms);
mk_edge(gpio_cap, 5);
// 此时应该产生了两次捕获事件
// 把它们读出来
ret = aw_hwtimer_cap_read(fd, &cap_val1, AW_WAIT_FOREVER);
if (AW_OK != ret) {
aw_kprintf("cap read cap_val1 failed
");
return;
}
ret = aw_hwtimer_cap_read(fd, &cap_val2, AW_WAIT_FOREVER);
if (AW_OK != ret) {
aw_kprintf("cap read cap_val2 failed
");
return;
}
cap_val2 -= cap_val1;
cap_val2 *= 1000000;
cap_val2 /= p_config->sample_rate;
if (is_rising) {
aw_kprintf("two rising edge between %u ms
", ms + 5);
}
else {
aw_kprintf("two falling edge between %u ms
", ms + 5);
}
aw_kprintf("two capture events between %llu us
", cap_val2);
}
static void demo_cap_base(int gpio_cap)
{
int fd;
aw_err_t ret;
aw_hwtimer_cap_config_t config;
// 使得测试GPIO输出为0
aw_gpio_set(gpio_cap, 0);
fd = aw_open(CONFIG_DEMO_HWTIMER_CAP_DEV_NAME, AW_O_RDWR, 0);
if (fd < 0) {
aw_kprintf("cap open failed!
");
return;
}
// 获取捕获定时器的配置
ret = aw_hwtimer_cap_config_get(fd, &config);
if (ret != AW_OK) {
aw_kprintf("cap config get failed...
");
aw_close(fd);
return ;
}
int is_rising;
// 配置为上升沿触发捕获
config.cap_edge_flags = AW_CAPTURE_RISING_EDGE;
is_rising = 1;
ret = aw_hwtimer_cap_config_set(fd, &config);
if (ret != AW_OK) {
aw_kprintf("cap config set failed...
");
aw_close(fd);
return ;
}
ret = aw_hwtimer_cap_start(fd);
if (ret != AW_OK) {
aw_kprintf("cap start failed...
");
aw_close(fd);
return ;
}
test_cap_single_edge(fd, gpio_cap, 20, &config, is_rising);
aw_close(fd);
}






至此,所有类型的硬件定时器样例均已展示完毕,在软件应用设计中可根据实际需求选取不同类型的定时器进行使用。更多其他类型外设的用法介绍,请关注后续同系列推文~







原文标题:【产品应用】AWorksLP 样例详解(MR6450)—— HWTimer
文章出处:【微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
致远电子
+关注
关注
13文章
424浏览量
32660
原文标题:【产品应用】AWorksLP 样例详解(MR6450)—— HWTimer
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
基于光波导的AR和MR系统仿真
| | 增强和混合现实(AR & MR)系统的最常见设计都将光导设计与表面结合,包含用于耦入/出出瞳扩展的微米和纳米结构区域(光栅)。 许多影响设备最终质量的复杂效应(例如,描述
发表于 04-28 08:12
FAN6756MR:高效节能的电源控制解决方案
: FEBFAN6756MR_T03U065A.pdf FAN6756MR概述 产品描述 FAN6756是一款采用创新mWSaver™技术的下一代绿色模式PWM控制器
Atmel ATmega325/3250/645/6450微控制器:性能与特性深度解析
Atmel ATmega325/3250/645/6450微控制器:性能与特性深度解析 在嵌入式系统设计领域,选择一款合适的微控制器至关重要。Atmel ATmega325/3250/645
固件烧录速度实测:JTAG比UART快6.8倍
在批量生产场景中,固件烧录效率直接影响产线节拍与交付能力。如何选择最优烧录方式?本文以ZLG致远电子MR6450系列核心板为例,通过实测数据为您解析。MR6450核心板MR6450是Z

瑞萨RL78/F22 MCU基于e2studio开发环境创建触摸应用样例工程
瑞萨RL78/F22 MCU基于e2studio开发环境创建触摸应用样例工程


MR30分布式I/O助力物流分拣系统智能化升级
本文以MR30分布式I/O在某大型电商物流中心分拣系统的应用为例,详细阐述其在合流、分拣、分流、分运全流程中的模块化应用方案。
基于开源鸿蒙的图片编辑开发样例(2)
本期内容介绍基于开源鸿蒙在RK3568上开发图片编辑样例的全流程,分为上篇和下篇,本篇为下篇,主要介绍标记、保存图片功能。
基于开源鸿蒙的图片编辑开发样例(1)
本期内容介绍基于开源鸿蒙在RK3568上开发图片编辑样例的全流程,分为上篇和下篇,本篇为上篇,主要介绍添加相册图片、编译图片功能。

新洁能NCE65TF099:高频开关性能如何赋能不同产品应用?
在当今快速发展的电子技术领域,高频开关性能已成为衡量功率器件性能的关键指标之一。新洁能凭借其卓越的高频开关性能,正在为各种产品应用带来前所未有的赋能与变革。本文将深入探讨新洁能NCE65TF099
MR30分布式I/O模块在化工行业的应用
氧化铝等化工行业实现稳定生产。本期案例使用的MR30系列分布式I/O产品:MR30-FBC-PN、MR30-16DI、MR30-16DO、
MR30分布式I/O模块在涂装产线中的应用
某装备制造企业主要从事自动化焊割、涂装生产线的设计与制造,其中涂装生产线涉及喷砂、喷漆、热处理、废气处理等工艺。明达技术的MR30系列分布式I/O,性能稳定,易上手,方便接线,助力企业提升产品
基于开源鸿蒙的AVPlayer视频播控开发样例
在开源鸿蒙生态建设中,多媒体能力是构建丰富用户体验的核心要素。本开发样例基于AVPlayer实现,AvPlayer支持流媒体和本地资源解析、媒体资源解封装、视频解码和渲染功能,适用于对媒体资源进行端

RISC-V和ARM有何区别?
在微处理器架构领域,ARM与RISC-V是两个备受关注的体系。ZLG致远电子在推出ARM核心版后,又推出了基于RISC-V的MR6450核心版,这引发了人们对这两种架构差异的深入探讨。ARM

基于瑞萨电子RA8T2 sensorless方案的样例工程 可对电流环进行TCM化设置
基于瑞萨电子RA8T2 sensorless方案的样例工程 可对电流环进行TCM化设置



评论