 拒止环境下无人系统作战模式及关键技术
拒止环境下无人系统作战模式及关键技术

摘要
自美军将俄、中等国的防御战略命名为“反介入/区域拒止”战略以来,为增强无人系统的作战能力,美军先后启动了一系列作战项目,拒止环境下无人系统作战模式已经成为研究的热点。梳理了美军反制拒止环境的典型项目进展情况,探讨了拒止环境下无人系统的作战模式,从自主协同、抗干扰定位、电子战技术、平台性能等方面分析了其关键技术,分析结果表明无人系统作战的灵活多样性能够对拒止环境造成较大威胁。可为相关领域模式探讨和技术攻关提供一定的参考。
“911”事件后,美国相继发动阿富汗战争和伊拉克战争,战争期间暴露出的发展中国家快速崛起、军事科技进展飞速及美军军事学说发展落后等问题导致美国新保守主义崛起,两任国防部长相继进行军事制度改革。2001年,美国防部在《四年防务评估报告》中首次将俄、中、伊朗等国的防御战略命名为“反介入”(anti-access)和“区域拒止”(aera-denial)战略,并在此后大肆渲染“中国威胁论”以推进军事转型和高新武器发展。
“反介入/区域拒止”是指在划定区域内构造强对抗环境,阻止外部势力介入或干预。与常规作战环境相比,拒止环境下双方对抗强度大幅增加,体现在:(1)有人军事设施面临更高危险,导致无人系统间对抗增加;(2)电磁域的高强度信息对抗,通讯和定位保障差;(3)拒止环境导致的长距离作战;(4)目标拒止技术广泛应用,如诱饵、伪装、目标移动等;(5)海陆空协同作战,多军种合作广度、深度增加;(6)特种作战强度增加等。为实现战略反制,确保美军的绝对优势地位,美国国防部提出“空海一体战”理念,陆军提出“多域战”理念,空军提出“融合战”理念,海军提出“电磁机动战”概念,美国国防高级研究计划局(DARPA)提出“拒止环境中的协同作战”(CODE)项目等。这些理念或项目均明确指出美军对中远程弹道导弹、隐形轰炸机、无人机、超远程无人潜航器和定向能武器的发展意图。
近年来,以无人系统为代表的新军事技术飞速发展,2016年美智库发表的《亚太地区无人机系统展望》中也称无人机是反制中国拒止战略很好的选项。然而拒止环境下无人系统作战同样面临许多困难与挑战,主要表现为:(1)现有无人系统自主适应战场变化的能力有限;(2)单机任务模式居多,受“人在回路”影响,人机数据交互量庞大,战术效果差;(3)多机协同作战能力有限;(4)改善无人系统生存能力的常规方法成本高昂或技术不可行;(5)运作成本高,维护、操纵人员多,对于战场动态反应慢,与常规作战系统的兼容性差。因此,为提升无人系统在拒止环境下的作战能力,研究其作战模式及关键技术是十分必要的。
01典型项目发展概况
美军自2001年提出“反介入/区域拒止”战略改革军事理念以来,在无人系统方面先后启动了一系列项目,旨在通过同构、异构平台协同作战样式突破拒止环境压力。
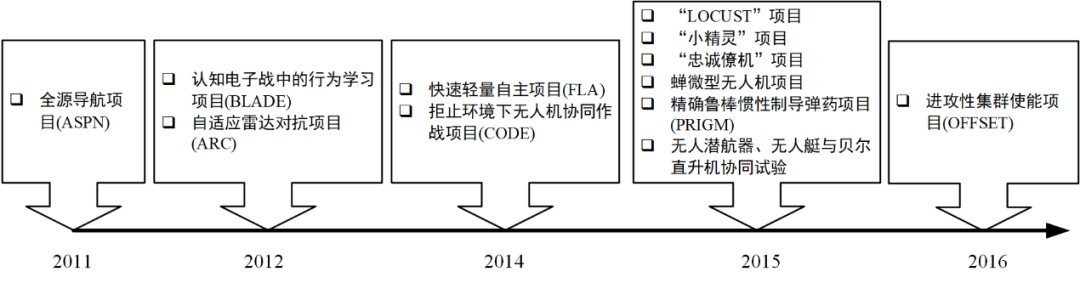
图1 美军典型项目推进历程
从美军相关项目的推进历程可以看出,美军反制拒止环境的核心战术与发展方向在于无人系统间协同作战。随着拒止环境下导航、数据链等技术的完善,自2014年起,无人系统项目的启动与相关试验的开展日益频繁。下面为其中具有代表性的几个项目。
1.1 “CODE”项目
2014年4月,美国国防高级研究计划局(DARPA)启动“拒止环境中协同作战”(CODE)项目,旨在基于现有武器,通过发展协同算法及监督技术提升无人系统在拒止环境下的作战能力。CODE主要的作战任务是:对防空炮兵的战术侦察、摧毁敌军防空系统、以及反水面战。具体目标是:开发、测试和验证单机自主和协同自主技术,提升无人系统的单机自主及多机协同能力;开发监控界面以提升对于无人系统的监控效率和监控能力,并进行辅助决策;建立开放的架构、提供明确的界面以便将不同类型的系统及功能进行快速整合。
DARPA将CODE项目分为三个阶段执行。第一阶段于2016年初完成,主要进行项目需求分析与总体设计,针对拒止环境特征,验证了协同无人机在强对抗环境下的作战可能性与作战潜力;分析了协同无人机可能的战术战法,着重发展能够增强协同无人机战场打击能力、提升存活率的近二十种自主行为;基于“未来机载能力环境”(FACE)标准、“无人控制程序”(UCS)标准、“开放式任务系统”(OMS)标准和“通用任务指挥和控制”(CMCC)标准等通用开发标准,预开发项目后续所需的开放式系统架构与系统接口进行。第二阶段于2017年底完成,实现了开放式架构的系统软硬件开发;以RQ-23虎鲨无人机为空中试验平台,对多无人机自主协同能力进行了大量飞行验证试验。第三阶段于2019年初完成,2019年2月DARPA在Yuma基地对CODE技术开展了一系列综合验证试验。试验中,6架装备了CODE兼容传感器的RQ-23虎鲨无人机首先起飞,任务小组在地面站上同时监视这6架无人机和14架虚拟仿真无人机的态势;将软件平台、开发的自主协同算法以及抗干扰网络整合,创造了逼真的半实物半虚拟作战环境;项目团队实现了虚拟目标打击、威胁应对、战术制定等多个作战目标,验证了作战系统在通信受到干扰、GPS信号不可用的情况下达成试验验证目标的能力。
1.2 “蜂群”无人机项目
拒止环境下对手通常会布置多个综合性防空系统,针对这种作战环境,美军提出了通过大量小型、成本较低的无人机对敌方防空系统进行攻击,使其防御网达到饱和状态,进而突破防御网的作战构想,即“蜂群”项目。无人机蜂群可以共享数据并协同执行任务,能够携带不同载荷,协同完成侦察、打击任务,即使其中一架被击落,其余无人机仍可继续任务,被击落的损失在可承受范围之内。这种作战方式具有突防能力强、作战成本低、侦察打击融合度高、单兵目标特征小的优势,已成为未来战争的发展趋势之一。蜂群作战最典型的代表有“小精灵”和“LOCUST”项目,这些项目同样可以与CODE技术协作发挥更大的作战优势。
(1)“小精灵”项目
DARPA于2015年9月发布“小精灵”项目公告。最初的设计构想有两个:一是通过低成本无人机群使对方的防空火力网达到饱和,降低大型战斗机受到攻击的风险以减少损失;二是为了解决由于控制成本而造成的无人机尺寸小、航时短的问题,由大型母机将无人机群带至作战空域附近,进行空中的集群发射和回收。低成本与可回收技术结合,进一步提升了作战模式的经济可行性。“小精灵”无人机巡航时间为1-3小时,飞行速度预计可达0.8马赫以上,可由B-52、B-1、C-130母机平台发射,在窗口时间内回收成功率可达95%。该项目分为三阶段:系统设计阶段、技术成熟阶段、飞行试验阶段。DARPA计划于2020年完成演示验证工作,设定的装备目标为1000架“小精灵”无人机及25套机载设备。
(2)“LOCUST”项目
“LOCUST”(低成本无人机集群技术)项目由美国海军研究办公室(ONR)2015年4月提出,其核心是自主集群飞行技术。美军希望通过紧凑型发射系统在短时间内向空中发射多架折叠袖珍无人机,无人机编队可以执行预先设定的任务,也可自主执行任务。项目使用了由Seonsintel公司生产的“郊狼”无人机,续航能力一小时左右,最高时速约145 km/h,单机重量不超过5.9 kg,发射系统的发射速度可达每分钟30架。2016年7月,雷声公司利用“郊狼”无人机在墨西哥湾开展了舰基无人机群试验。目前,雷声公司验证了C-130H运输机的无人机发射能力,后续将继续开展P-8“海神”海上巡逻机、V-22“鱼鹰”倾转旋翼机等机型的发射能力测试。雷声公司表示无人机群编队验证阶段已基本完成,后续将开展更复杂的高自主化飞行试验。
1.3 “忠诚僚机”项目
“忠诚僚机”项目于2015年由美国空军研究实验室(AFRL)启动,采用典型的有人-无人协同作战模式,有人飞机作为长机、无人机作为僚机协同作战,旨在使美军有人战斗机的驾驶员可以对无人机进行控制,大幅提升作战能力、作战效率和安全性。在区域拒止作战环境中,“忠诚僚机”使得长机可以在对目标发动攻击前保持无线电静默,并在敌军防控火力打击圈外巡航,由僚机进入火力打击范围,充当长机的“眼睛”、“耳朵”和“拳头”,实现对敌的侦察、探测和打击。项目的具体内容为:为人-机编队提供灵活的自主系统、多无人机协同编队执行任务、保证系统可在拒止环境中作战、保证作战的安全性和有效性。
“忠诚僚机”项目采用XQ-58A“女武神”无人机作为验证平台,于2019年3月在亚利桑那州开展了首次试飞试验。“女武神”无人机长8.8 m,翼展6.7 m,与常规战斗机相比体型较小,而最大作战半径接近2000 km。为了降低成本,舍弃了起落架和起降控制机构,采用火箭助推起飞,降落伞回收,且并未配备高端控制系统。其特点是航程大、成本低、机动性较弱,单价成本仅200万美元。依据美军计划公告,“忠诚僚机”项目2020财年试验作战想定场景是:GPS和局部通讯受到一定干扰、敌方防空力量较弱的情况;2022财年将验证:在GPS和局部通讯受到较强干扰、敌方防空系统较强、存在电子对抗的情况下,“忠诚僚机”编队对敌方防控系统的压制能力。
02拒止环境下无人系统的作战模式分析
根据“反介入/区域拒止”作战的描述,其核心是在划定区域内构造强对抗环境。考虑到无人系统对于信息系统的强依赖性,无人系统在拒止环境下作战面临的首要问题就是强信息对抗环境。过去战场上信息对抗较弱,更多依靠战场指挥员的主观判断。随着信息化技术的发展和各国拒止能力不断提升,作战模式逐渐向强对抗、智能化、立体化方向发展。
2.1 协同作战
由于拒止环境下战场情况变化快、对抗强、导航与通讯条件不稳定,为提升无人系统作战过程中的灵活性、有效性和生存性,美军提出增强协同作战能力,主要可以概括为三种作战样式:人-人协同、机-机协同、人-机协同。人-人协同即编队协同,本质上是无人机平台指挥员之间以及指挥员和有人战斗机飞行员之间的协同配合;机-机协同即集群作战,一群自主无人机建立通讯网络,通过在节点内实时共享信息,快速完成对于目标的多方位侦察、探测和打击任务;人-机协同又可以称为有人-无人协同,在这种作战概念下,有人平台作为编队的主机,多架无人机作为僚机,由主机发布作战指令,僚机负责执行态势感知、欺骗干扰、武器投放等危险性比较高的作战任务,能够极大提升有人平台的作战半径和作战人员的安全性。
图2为协同作战示意图。在作战伊始,通常由大型运输机、武库机或其它空中投放系统进行无人机集群投放,无人机之间实现通讯自组网并完成任务分配;根据任务分配结果的不同,形成多个战术编队子群。在作战过程中,各子群相互配合而非独立地实现对目标的侦察监视、压制干扰与火力打击。作战任务完成后,依据自身健康状况,完成空中回收、地面回收或自毁。
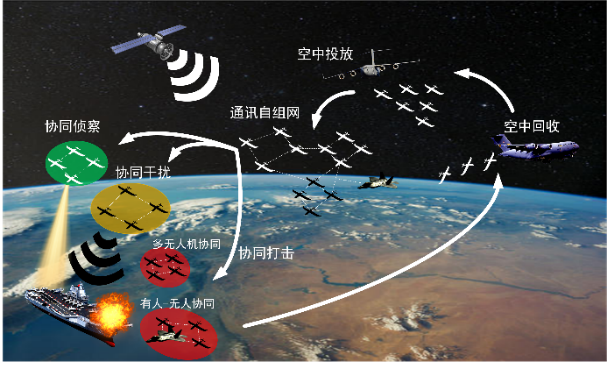
图2协同作战示意图
2.2 智能化作战
人工智能技术正在推动作战模式由信息化向智能化转变,尤其是由于区域拒止概念逐渐强化,通讯可靠性难以保障,对无人作战平台的智能自主性提出了更高要求。智能化作战的主要特征包括:无人系统自主感知战场态势、自主识别打击目标、自主实现作战规划、自主释放作战效能以及自主评估毁伤效果。智能化技术的发展正在逐渐将人类的角色由战争的指挥员变为监督者,这也意味着作战人员的减少及作战效率的提升。
无人系统的自主性同样能够提高作战能力,作战模式正由自动化向自主化转变。自动化意味着无人系统可以依据人类预先设定好的确定性规则行动,而自主性代表无人系统能够在人工智能技术的推动下实现自主学习,不断从战斗中获取经验进行学习,甚至改进和创新作战方式,降低对信息的依赖,突破“人在回路”作战的局限性。智能化作战系统提供人-机交互接口以确保紧急情况下的人工干预优先控制权。作战中由智能决策系统完成任务的生成、调度及规划,将作战指令发送给分系统执行机构,再通过传感器获取状态信息返回状态监测模块形成闭环,如图3所示。
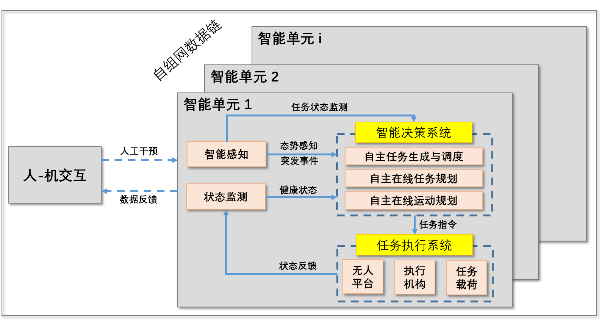
图3智能化作战示意图
2.3 多域融合作战
“作战云”理论是由美国空军最早提出,核心思想是通过综合海上、陆上、天空、太空以及网络的作战能力,整合作战数据,实现多域融合和优势互补,在作战区域形成更大的综合效益,提升作战效率和成功率,作战模式如图4所示。跨域综合作战模式的发展以云计算能力的提升为基础,逐渐形成了“云部署、云聚合、云攻击、云消散”的作战模式,各个作战单元动态接入云计算数据中心,与云端实时共享数据,有效获知敌方及己方力量的位置坐标和状态信息。
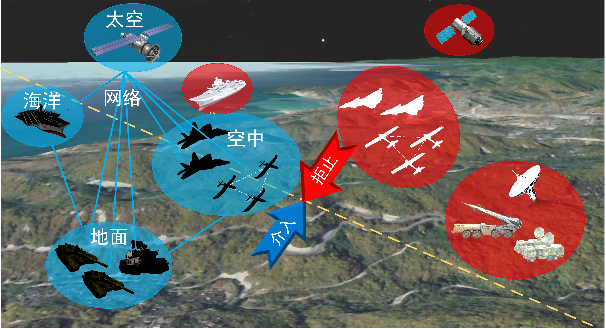
图4多域融合作战示意图
在美军的传统作战模式中,一向强调充分运用卫星通讯和空海联合力量作战,但随着对手区域拒止能力的提升,GPS和通讯信号成为了易被敌方切断的薄弱环节。美军提出的多域战思想,将军种间的相互依赖真正转化为相互融合,通过同时制造多个作战或战术困境抵消敌人优势,具体表现为:要求陆军及海军陆战队增强机动性,能快速有效的向其他领域输送作战力量;依托作战云实现不同作战域信息高度共享;不仅在物理域,更力求在心理域和认知域挫败对手,利用跨域融合高机动性营造的优势达成武力和思想层面的压制。
03关键技术分析
以无人机平台为依托,拒止环境下无人系统作战的关键技术主要涉及单机自主、多机协同、抗干扰定位、电子战技术、无人系统平台性能以及异构平台协作能力等。
3.1 单机自主作战技术
随着人工智能、智能控制等学科的发展,单机智能自主作战能力是减少“人在回路”影响的必然趋势。在单机智能执行任务时,环境感知与决策系统、飞行控制系统和有效载荷等任务子系统的协调一致是无人系统在不确定环境中具有任务自组织和自适应控制能力的保证。在机载传感器对战场态势有效感知的前提下,无人系统对任务序列自主决策;根据任务属性实时生成飞行路径,并由飞行控制系统完成威胁规避与轨迹跟随;有效载荷感知平台姿态,完成规定的任务。
单机智能自主技术主要包括:多传感器融合、自主学习与决策、飞行控制等。其主要应用包括:目标识别、态势感知与评估、实时任务与路径规划、自主学习与决策、可变自主权限的自主控制、任务状态监视与告警管理、故障检测与自修复控制等。
3.2 多机协同作战技术
单机系统智能化的不断完善是多机自主协同能力的基础,多机自主协同能力是无人系统智能自主能力发展的最终目标,也是未来无人系统作战的关键。
多机分布式自主协同作战在多个平台、传感器和有效载荷之间构架桥梁,形成平台数据共享的分布式网络,应用分布式协同控制技术、实时任务与轨迹规划技术等实现最小的人工干预,同时有效执行多个任务。
协同自主技术主要包括:协同体系构建、多源数据融合、决策共享与节点管理、集群自组织、抗干扰通信等。其主要应用包括:开放式实时协同体系结构、多平台数据一致性、协同任务与路径规划、协同察打、协同低带宽数据链、编队技术等。
上世纪90年代末,美国首次提出“蜂群作战”概念。2005年,美国陆军航空兵应用技术管理局(AATD)发起的无人机自主协同作战项目(ACO)。2014年,DARPA启动CODE项目,致力于发展拒止环境下无人机协同作战技术。2015年,美国海军研究局在发布的新版《美国海军科学技术战略》中特别强调分布式无人系统的重要性。
3.3 GPS拒止环境下定位导航技术
无人系统依赖定位与导航系统获取自身时空信息。而美军“空海一体战”的核心行动是针对各种军事网络的致盲作战,通过电子战手段和赛博攻击形成GPS拒止环境。此类威胁环境对无人系统的指挥系统、载荷系统和通讯网络构成极大威胁。因此,GPS拒止环境下的辅助定位与导航能力是无人战斗单元的关键技术之一。
针对GPS拒止环境,美军于2011年启动全源定位与导航(ASPN)项目,截至2017年5月,系统在有/无GPS环境下完成了多平台框架通用性及综合导航能力的验证;2014年12月,DARPA启动快速轻量自主(FLA)项目,完成了小型无人机在无人员操作且无GPS信号情况下在障碍环境中自主导航飞行;针对高级惯性器件,2015年启动精确鲁棒惯性制导弹药(PRIGM)项目,研制先进导航惯性测量单元(NGIMU)与先进惯性微传感器(AIMS),以求在极端条件下提供稳定的导航性能。
3.4 电磁反干扰技术
反介入环境中,电磁空间对作战单元的拒止模式分为压制与欺骗。前者通过多个干扰源实现对目标接收机压制,使其无法接收有效信号;后者通过调节电磁波排放,使目标接收机捕获欺骗信号。因此,提高电磁拒止环境下的目标信号识别与反制是电子战关键。
电子战系统首先需要对隐藏于压制信号、掩护信号、欺骗信号中的目标信号准确识别,进而选择对应的预编程序电子对抗技术,以保证决策正确与战术反制。传统目标排放的电磁波频率和模式由硬件决定,而现代战场上目标排放波形更加灵活,为电子战战场带来更大挑战。因此,建立一套能够快速识别与反制的电子战系统成为拒止环境作战的关键技术之一。
DARPA已于2012年7月启动自适应雷达反干扰(ARC)项目,目标为使电子战系统自适应、实时生成对未知雷达波的有效对抗措施。ARC技术通过嵌入算法和信号处理模块隔离敌方和己方雷达信号,推断不同雷达信号反映的威胁,并通过传输抵消信号的方式进行对抗。
3.5 低成本与长续航平台技术
区域拒止使得美国在拒止国家的近海介入成本急剧上升,而无人系统生产与维护成本高昂使得其难以大规模应用。另一方面,拒止环境下无人系统面临大范围长时间作战,这对于无人系统的续航能力提出更高的需求,没有长航时能力的无人系统将难以具备执行任务的能力。因此,低成本与长续航能力是未来无人机集群的平台特征与基础。
低成本平台技术主要应用包括:多学科设计优化、自动化制造与一体化成型、低成本复合材料、高精度无损维修维护等技术。3D打印技术、以自动铺带技术(ATL)与自动纤维铺放技术(AFP)为核心的自动化制造技术、大面积整体成型技术等得到有效应用,提高了生产效率,降低了无人机的生产成本。
在续航能力方面,相较于传统的锂离子电池、航空煤油等,安全、高密度的新型能源,如高能量密度蓄电池、氢燃料电池等是未来发展的重点方向之一。如美国海军研究室(NRL)的离子虎无人机采用氢燃料电池和高压液氢实现了航时48 h以上飞行,作战应用潜力巨大;美国XFC潜射无人机采用氢燃料电池,可在满载12.3 kg的条件下飞行6 h以上。
此外,对于大型无人机,使其具备或增强自主空中受油能力,对突破拒止环境下现役防御体系、提高系统作战效能与自由性大有裨益。如美国X-47B无人机,在不进行空中受油的情况下续航时间大于6 h,最大作战半径大于2100海里;而依靠空中受油技术X-47B可实现全球目标的覆盖,最大续航时间最大可达到100 h。
3.6 异构平台间兼容协作技术
拒止环境下无人系统协同作战必将与美军其它作战理念,如“空海一体战”概念等相呼应,因此,异构平台间兼容性与协同作战能力,尤其是跨域协同信息互联能力,是未来协同作战关键技术之一。
美军在“忠诚僚机”项目之外对其它异构平台协同作战进行了尝试与试验。如美军于2015年实现了REMUS-600型自主式无人潜航器、“冲浪者”无人艇与贝尔直升机之间的信息互联,形成了系统的广域监察能力,并完成了三者协同目标识别与打击任务。
04结束语
无人系统在拒止环境下的大规模应用是必然的,其作战能力的多样性与灵活性对防守方的拒止能力构成较大威胁。
在拒止环境下无人系统应用中,单机自主作战能力是基础,多机分布式自主协同作战能力是核心,GPS拒止环境下的定位与导航能力是支撑,电磁反干扰能力是关键,低成本与长航时平台是保障,异构平台间兼容性与协作作战能力是扩展。为提升综合作战能力,无人系统需充分融合各项技术,发挥各自作战优势。
审核编辑 :李倩
-
智能化
+关注
关注
15文章
5209浏览量
59714 -
无人机
+关注
关注
234文章
11141浏览量
193348 -
无人系统
+关注
关注
0文章
39浏览量
3459
原文标题:拒止环境下无人系统作战模式及关键技术
文章出处:【微信号:CloudBrain-TT,微信公众号:云脑智库】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录





 工商网监
工商网监
评论