 面向自动驾驶的高精度定位完好性
面向自动驾驶的高精度定位完好性

完好性是一个反映定位安全与可靠程度的性能指标,由安全至上的航空领域提出,并随着全球卫星导航系统(Global Navigation Satellite System, GNSS)在飞机导航中的普及而获得广泛应用。得益于有效的完好性监测方法,历史上从未发生过由于GNSS故障造成的空难事件。
以航空应用为标杆,完好性受到了同样追求极致安全的自动驾驶领域的关注,汽车行业明确提出了定位完好性需求指标。对于大多数自动驾驶方案,车辆的高精度绝对位置信息是域控制器的必要输入,通常通过融合GNSS、惯性测量单元(Inertial Measurement Unit, IMU)与轮速计等传感器获取。
作为使用最广泛的定位性能评价指标,精度衡量的是无故障状态下系统输出的估计位置与用户真实位置的偏离量,通常对应95%的总体性能表现,也就是两倍标准差(2σ)。尽管它最直观且容易理解,但是当位置信息直接参与车辆控制与决策时,仅靠精度来衡量定位结果的性能表现远远不够。
它是啥
按照定义,完好性量化了定位系统所提供的位置信息的置信程度,它的直接输出结果称为保护水平(Protection Level, PL)。PL随定位结果一起产生,它提供了当前时刻的定位误差上限。获得定位结果的PL值对于自动驾驶至关重要,当PL超出了预设的告警门限(Alert Limit, AL)时,系统将发出告警,提醒用户此时定位信息不可用。AL的大小取决于绝对定位信息在整个自动驾驶方案的权重,通常由车辆主机厂定义。
精度与完好性的举例对比如下:
精度
完好性
2σ估计精度:50cm的精度意味着在常规无故障运行条件下,系统可以95%的确定实际定位误差小于50cm;
完好性:50cm的PL意味着无论在任何运行环境中,系统都可以近100%的确定实际定位误差小于50cm。
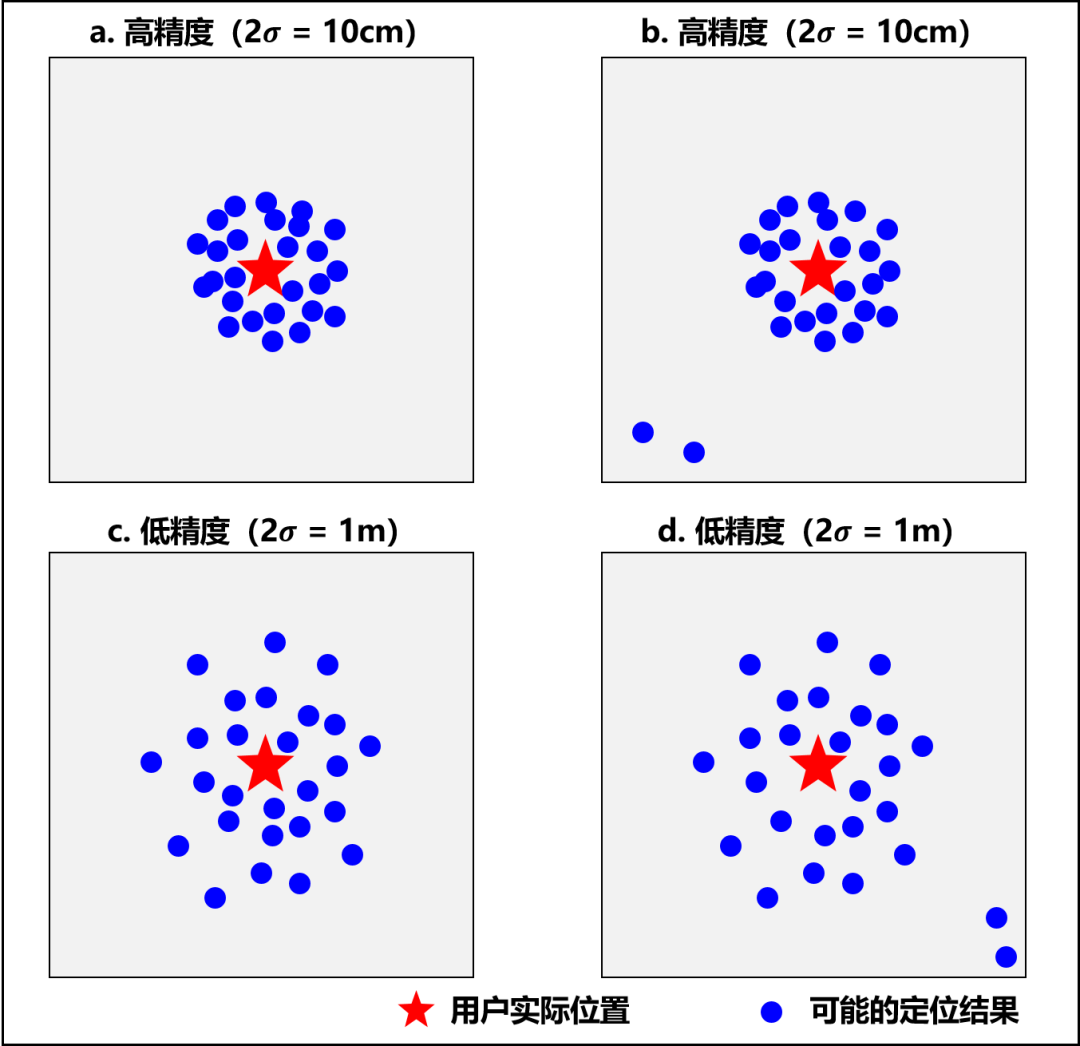
图1. 不同定位结果对应的精度值
图1展示了不同定位结果下的精度指标,由于精度只能反映出总体的95%的性能表现,所以图1a和1b对应相同的精度值(图1c和1d也是如此)。
然而相比之下,由于两个飞点的存在,图1b和1d的结果显然比1a和1c更差,也就意味着更容易引发自动驾驶事故。图1b和1d中所展示的这种小概率但误差值极大的结果称为定位故障,它们并没有反应在精度中,但确是完好性重点关注的事件。
怎么用
如上所述,完好性的直接输出信息是PL,它是和定位结果一起计算、实时输出的。
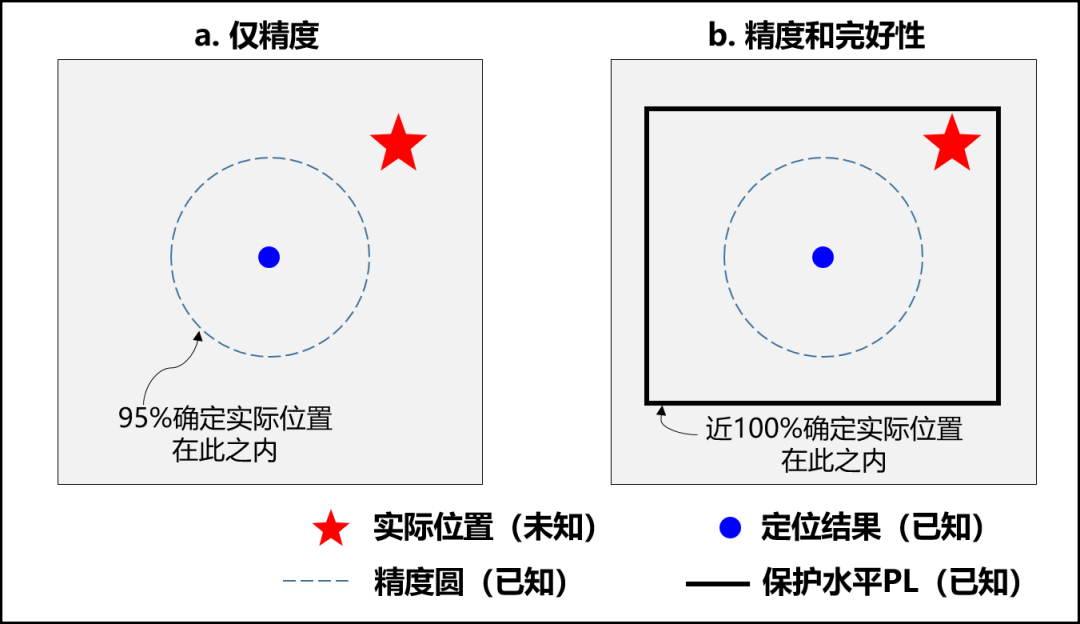
图2. 定位系统实时输出结果对比
图2对比了有无完好性情况下的系统输出状态。由于实时运行中永远无法知道实际位置,用户只能以定位系统提供的估计位置作为自动驾驶的输入信息,也就是图2中的蓝色中心点。相比于图2a,图2b中的PL定义了一个黑色方框,它意味着,虽然我们不知道用户的实际位置在哪里,但是不管在任何场景下,我们都能近100%的保证实际位置在黑框区域内。
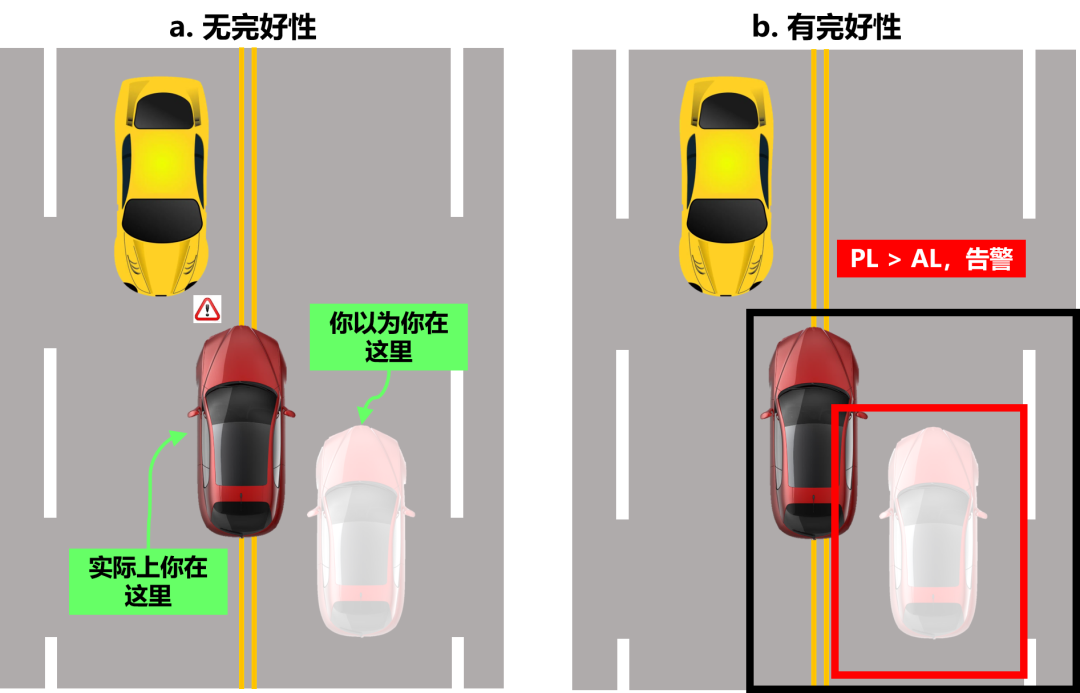
图3. 无完好性与有完好性下的车道定位示意图
图3展示了实时状态下完好性是如何保护用户的,其中的红色方框为提前预设的AL,黑色方框为动态求解的PL。在无完好性的情况下(图3a),过大的定位误差会造成潜在的交通事故;有完好性后(图3b),如果定位误差大到一定的程度会造成PL>AL,进而引起系统告警,在收到该指令后域控制器可及时采取措施,避免事故的发生。
怎么测
到目前为止,文中多次提到了“近100%”的说法,而这只是为了方便读者理解的一种简化。事实上,只要完好性失效的概率足够小就可以认为定位系统符合安全需求,这种可接受的极小概率称为完好性风险,它的需求指标(记为IREQ)通常规定在10-7至10-5量级。
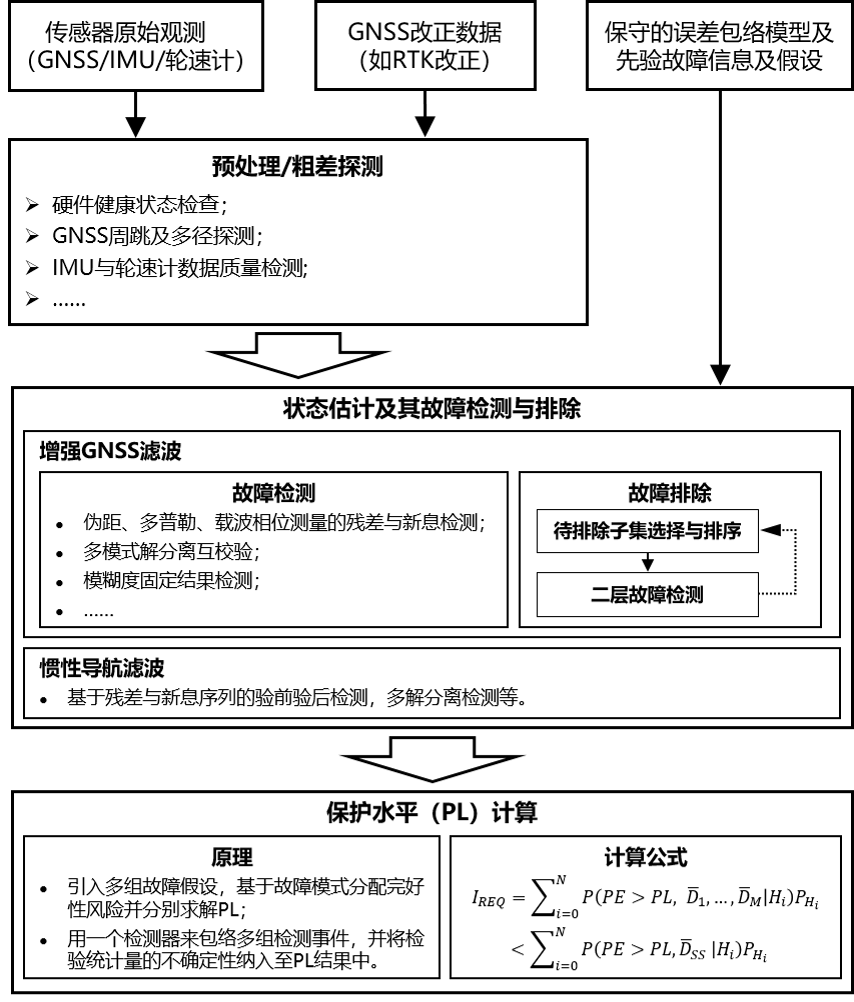
图4. 完好性监测算法流程图(以多解分离方法为例)
IREQ是计算PL的必要输入,一般会根据故障假设对其进行风险分解。PL的计算与定位算法方案和故障检测与排除逻辑高度相关,图4以多假设解分离方法为例归纳了定位完好性监测步骤。
到这里人们会自然地提出一个疑问,如何证明PL达到了近100%的置信度?
尽管目前有大量的仿真方法可以从不同的角度验证完好性监测的有效性,但是最有说服力的则是通过实际的道路测试对比PL与定位误差的关系。通过对比实时定位结果与参考真值可获得每个数据点的定位误差,进而可以与PL值一起展示在“定位误差vs.PL”图中,也就是图5所示的斯坦福图。
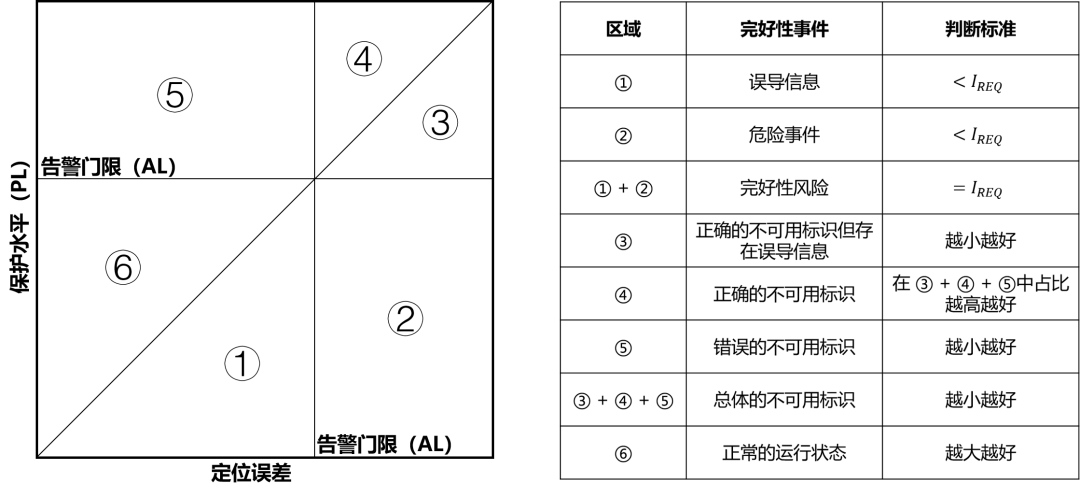
图5. 斯坦福图的区域划分及其判断准则
通过交叉比较定位误差、PL和AL,斯坦福图可以划分为6个区域,每个区域的评定标准归纳于图5右侧表中。

图6. 新纳传感车规级高精定位产品
作为一家领先的MEMS传感解决方案提供商,新纳其中的两款车规级高精度定位产品,RTK330LA和INS401(图6所示),二者均搭载了由新纳自主研发的完好性监测算法。
其中,RTK330LA是一款车规级高精度定位模组,采用贴片封装方式,可直接贴片于自动驾驶域控单元中。INS401是一款车规级高精度定位盒子,支持多种数据输出接口。
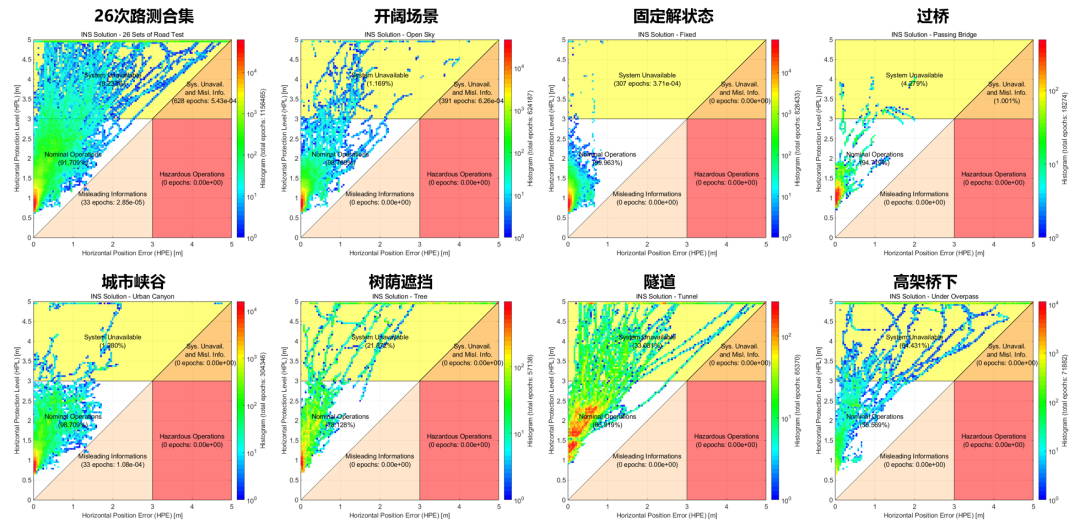
图7. INS401实测完好性结果
图7展示了INS401在不同的测试条件与运行环境中的实测完好性结果,本数据对应26次路测,所有的结果均为增强GNSS、IMU与轮速计的融合定位解。
审核编辑:汤梓红
-
GNSS
+关注
关注
9文章
1032浏览量
51488 -
卫星导航系统
+关注
关注
0文章
45浏览量
11482 -
自动驾驶
+关注
关注
795文章
15056浏览量
181991 -
高精度定位
+关注
关注
0文章
80浏览量
4173
原文标题:科普实验室 | 面向自动驾驶的高精度定位完好性
文章出处:【微信号:gh_fa70fba31167,微信公众号:新纳传感】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
意法半导体推出世界首个定位精度达到自动驾驶级别且符合汽车安全标准的多频GNSS接收器
硅谷组建团队、L3产品落地,想法多多的腾讯自动驾驶
UWB主动定位系统在自动驾驶中的应用实践
自动驾驶汽车的定位技术
如何让自动驾驶更加安全?
自动驾驶车的人车交互接口设计方案
UWB高精度定位在自动驾驶中的应用前景
UWB定位可以用在自动驾驶吗
高精度地图在自动驾驶中的应用优势是什么
自动驾驶高精度定位技术企业导远电子获得国投招商投资
GNSS高精度定位在自动驾驶领域的应用分析
GNSS中高精度定位定向模组M20助力自动驾驶车辆精准定位
GNSS中高精度定位定向模组M20助力自动驾驶车辆精准定位




评论