 经典卡尔曼滤波器的五个公式
经典卡尔曼滤波器的五个公式

先讨论滤波器的概念,滤波的意思是,让机器人在某个正确位置上对应的概率越高越好。
也就是可以理解为:把错误位置上的概率滤低,把正确位置处的概率滤高。
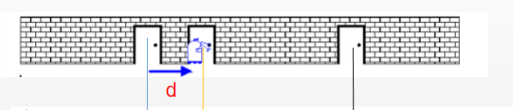
假设一个机器人小R在如下场景中出现,他刚开始不知道自己在哪(小R还没看到他眼前的门),因此他在这个场景中任何位置的概率是相等的。
如果此时纵坐标为机器人小R在对应位置处的概率,横坐标表示各个位置,应该是一条均匀分布的直线。

突然,机器人看到了眼前这个门,这里假设机器人提前知道一共有三个门,因此小R现在知道自己可能在任意一个门前,即三个门分别对应着一个正态分布。此时的概率波形可以理解为先验概率。

小R继续向前走到第二个门前,他通过自己身上安装的里程计发现自己走了d个单位。
根据之前的概率分布,小R可以预测到,自己的位置应该向右平移了d个单位。那么可以将之前的概率分布向右平移d个单位,得到此时通过传感器得到的概率分布。此时的概率波形可以理解为似然概率。
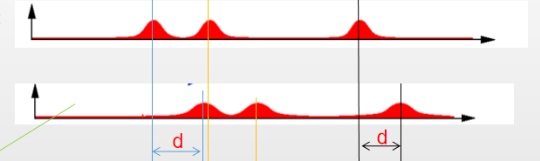
小R突然发现自己看到了第二扇门前,仅根据当前的观测,小R知道自己在三个门前的概率相同,又可以得到之前的三个正态分布。根据传感器预测得到的分布和根据先验信息得到的分布得:

两个波形信号可以做个卷积融合得到:

这样小R在第二扇门处(正确位置)的概率就变大了,在其他位置处的概率就变小了,进而达到了滤波的目的。
以上即是普通滤波器的直观解释,同样地,可以类比到卡尔曼滤波上。
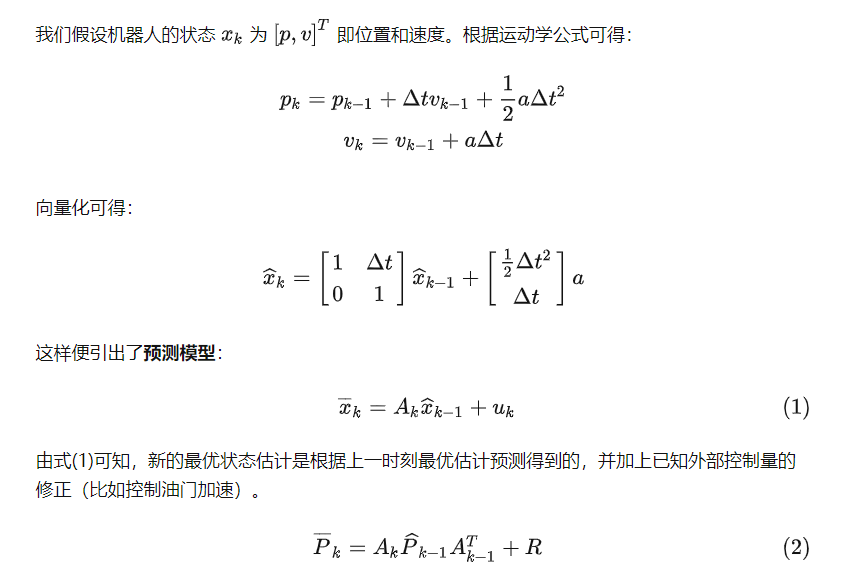
由式(2)可知,新的不确定性由上一时刻不确定性预测得到,并加上外部环境的干扰。
这时我们对系统的变化有了模糊的估计,更新的状态(均值)和不确定性(协方差)分别如式(1)和(2),预测的过程相当于之前的波形向右平移d个单位的过程。
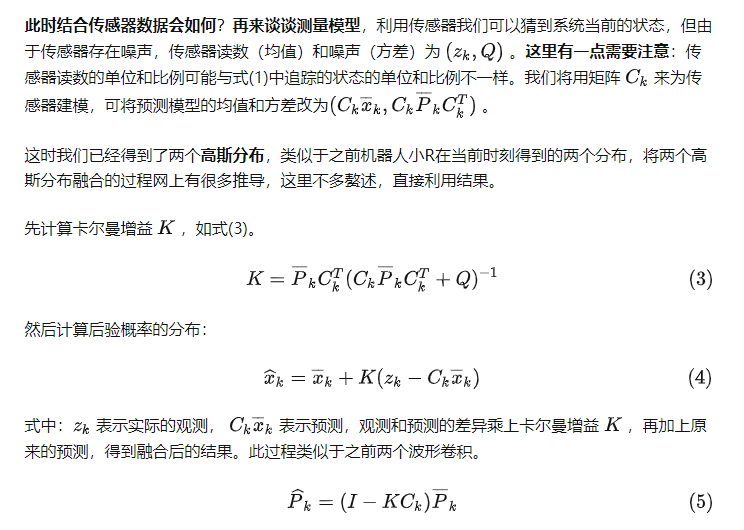
得到的新的最优估计可以放到下一时刻不断迭代。以上就是经典卡尔曼滤波器的五个公式,给出了线性高斯系统的最优无偏估计。
我们可以用这些公式对任何线性系统建立精确的模型,对于非线性系统来说,我们使用扩展卡尔曼滤波,区别在于EKF多了一个把预测和测量部分进行线性化的过程。
此时再看这个高赞无公式推导的回答来回顾全局,一切豁然开朗
无公式直白解释卡尔曼滤波:
假设你有两个传感器,测的是同一个信号。可是它们每次的读数都不太一样,怎么办?
取平均。
再假设你知道其中贵的那个传感器应该准一些,便宜的那个应该差一些。那有比取平均更好的办法吗?
加权平均。(乘卡尔曼增益 K)
怎么加权?假设两个传感器的误差都符合正态分布,假设你知道这两个正态分布的方差,用这两个方差值,(此处省略若干数学公式),你可以得到一个“最优”的权重。
接下来,重点来了:假设你只有一个传感器,但是你还有一个数学模型(指的是上文中的预测模型)。模型可以帮你算出一个值,但也不是那么准。怎么办?
把模型算出来的值,和传感器测出的值,(就像两个传感器那样),取加权平均。
OK,最后一点说明:你的模型其实只是一个步长的,也就是说,知道x(k),我可以求x(k+1)。
问题是x(k)是多少呢?答案:x(k)就是你上一步卡尔曼滤波得到的、所谓加权平均之后的那个、对x在k时刻的最佳估计值。于是迭代也有了。这就是卡尔曼滤波。(无公式)
-
传感器
+关注
关注
2578文章
55723浏览量
794813 -
滤波器
+关注
关注
162文章
8487浏览量
186516 -
模型
+关注
关注
1文章
3854浏览量
52310
原文标题:SLAM后端优化中卡尔曼滤波的直观通俗解释
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
卡尔曼滤波器介绍

如何理解卡尔曼滤波器?卡尔曼滤波器状态方程及测量方程

卡尔曼滤波器的特性及仿真




评论