 【九联科技Unionpi Tiger开发板试用体验】系统安装篇 九联科技Unionpi Tiger——安装ROS Noetic
【九联科技Unionpi Tiger开发板试用体验】系统安装篇 九联科技Unionpi Tiger——安装ROS Noetic

本文来源电子发烧友社区,作者:jf_25674040, 帖子地址:https://bbs.elecfans.com/jishu_2303393_1_1.html
感谢九联科技和发烧友,给我这次试用机会。
1. 下载ubuntu镜像
链接:https://pan.baidu.com/s/1Yg34WZV_eUeflGg2cAMVlg?pwd=7jya
提取码:7jya
2. 烧录ubuntu镜像
2.1 烧录工具
http://www.unionman.com.cn/uploads/soft/20220530/1653887506.zip
下载完成后,按提示安装即可
2.2 进入烧录模式
使开发板进入烧录模式,可以通过以下两种方式:
①在开发板已经接上电源的情况下,长按 UPDATE 按键,单击 RESET 按键。
②在开发板未通电的情况下,先长按 UPDATE 按键,再接入电源。
2.3 开始烧录
从菜单“文件”-“导入烧录包”选择加载要烧录的镜像文件,也可以通过“最近打开的文件”选择最近使用过的烧录镜像文件,其中默认对导入的烧录包进行校验检查(不需要校验可去除)。
导入烧录包,点击“开始”,接着就可以等待镜像烧录。烧录完成之后,如果成功“状态”列则显示浅绿色,如果失败则显示红色。
3. 安装软件
3.1 更新国内源
将http://ports.ubuntu.com/更新成http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/
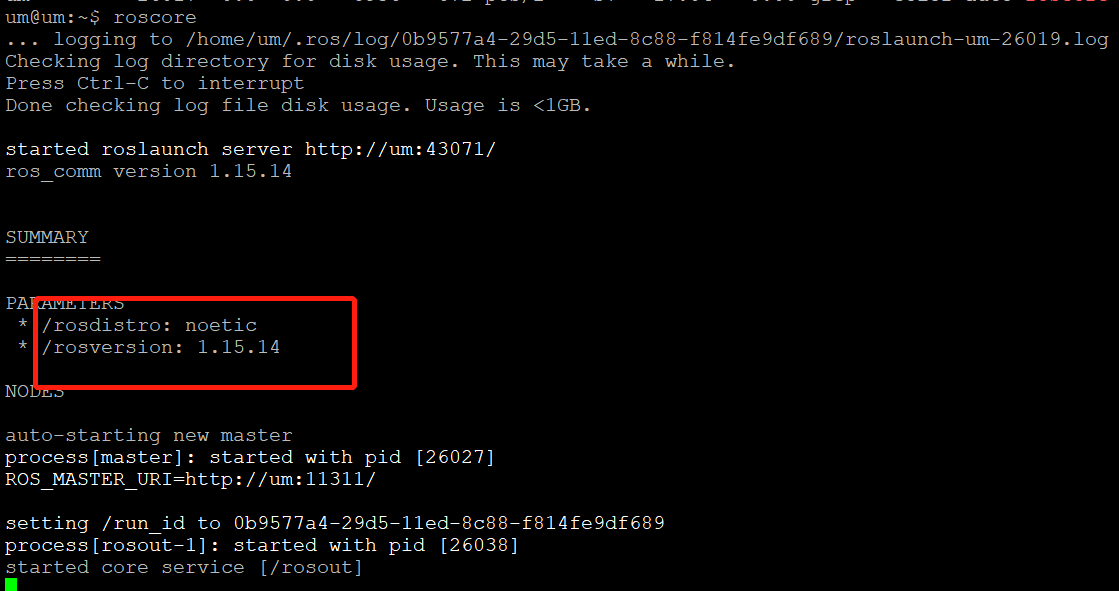
3.2 安装ROS Noetic
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$ sudo apt install curl # if you haven't already installed curl
$ curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
$ sudo apt update
$ sudo apt install ros-noetic-desktop-full
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
$ sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
OpenHarmony
+关注
关注
33文章
3983浏览量
21458 -
九联科技
+关注
关注
0文章
132浏览量
2771
发布评论请先 登录
相关推荐
热点推荐
开发必看,RK3576基于Ubuntu22.04安装 测试ROS2机器人系统
本文介绍基于Ubuntu22.04安装ROS2机器人系统教程,并附带详细测试方法,基于触觉智能RK3576核心板方案,使用配套开发板Purp

晶科能源Tiger Neo 3.0的问题解答(9)
关于晶科能源飞虎3(Tiger Neo 3.0)组件,近期受到了大家广泛关注,不知不觉到了第九集。小编继续整理了大家最为关心的热点问题,并同步更新在了官网上,方便查阅。欢迎大家继续在评论区留言、互动。
九联开鸿斩获开源鸿蒙TOP共建单位
11月28日,鸿蒙星光盛典生态论坛在深圳隆重举办。凭借在开源鸿蒙领域的持续深耕与实践积累,九联科技旗下子公司九联开鸿受邀出席这一高规格盛会。与鸿蒙生态同行者们共话创新、见证荣耀。
九联科技亮相2025开放原子开发者大会
11月21-22日,以“AI共智,开源共享”为主题的2025开放原子开发者大会在北京盛大举办。作为开源鸿蒙生态的核心共建力量,九联科技旗下子公司九联
九联科技旗下骧腾科技荣获武器装备质量管理体系认证证书
近日,九联科技旗下全资控股子公司广东骧腾科技有限公司(以下简称“骧腾科技”)历经严苛审核,正式荣获GJB 9001C-2017武器装备质量管理体系认证证书。这一里程碑式的成就,不仅标志着骧腾科技的质量管理体系完全达到国家军用标准,更彰显了
九联科技与律大大网络达成战略合作
当法律服务还在为合同审核效率低、风险识别滞后、数据整合困难而困扰,九联科技已率先迈出跨界创新步伐——近日,九联科技正式与律大大网络(深圳)有限公司(以下简称“律大大网络”)达成战略合作
【道生物联TKB-623评估板试用】开箱与认识TKM210开发板
在海量用户接入时出现的上述问题, 道生物联采取了 mMlMO+窄带调制的解决方案,也就是 TurMass技术。
TKB-623开发板
TKB-623开发板采用的是TKM-210的核心模块
发表于 11-10 22:37
【道生物联TKB-623评估板试用】用一段视频简单介绍一下道生物联TKB-623评估板试用
今天拍了一段道生物联TKB-623评估板的视频来给大家介绍一下这款开发板,下面是开发板的图片介绍:
上海道生物联技术有限公司专注于
发表于 11-07 22:59
九联物联出席全国水表行业第十一届技术交流会
10月15-16日,中国计量协会水表工作委员会全国水表行业第十一届技术交流会在厦门天元酒店隆重举行。作为行业领先的物联网通信一体化解决方案及服务提供商,九联科技旗下全资子公司惠州九联物
九联科技斩获2025年惠州研发实力高企二十强
近日,惠州科技招商和创新资源交流合作大会暨2025年惠州市产业科技与高新技术协会年会隆重召开。作为惠州市产业科技与高新技术协会会长单位,九联科技董事长、总经理詹启军出席活动并为企业授牌。同时公司斩获“2025年惠州研发实力高企二十强”重要奖项,彰显了
九联科技与黄河设计院达成战略合作
近日,广东九联科技股份有限公司(以下简称“九联科技”)与黄河勘测规划设计研究院有限公司(以下简称“黄河设计院”)达成了战略合作框架协议。双方将依托各自核心优势,共同推动水利行业数字化转
九联开鸿亮相2025开源鸿蒙开发者大会
近日,开源鸿蒙开发者大会2025在深圳隆重开幕。本次大会由开源鸿蒙项目群工作委员会主办,华为、润开鸿、中软国际、开鸿智谷、九联开鸿、鸿湖万联、深开鸿、诚迈科技、中国南方电网、中国科学院




评论