 开放式激光振镜运动控制器:C++快速开发
开放式激光振镜运动控制器:C++快速开发

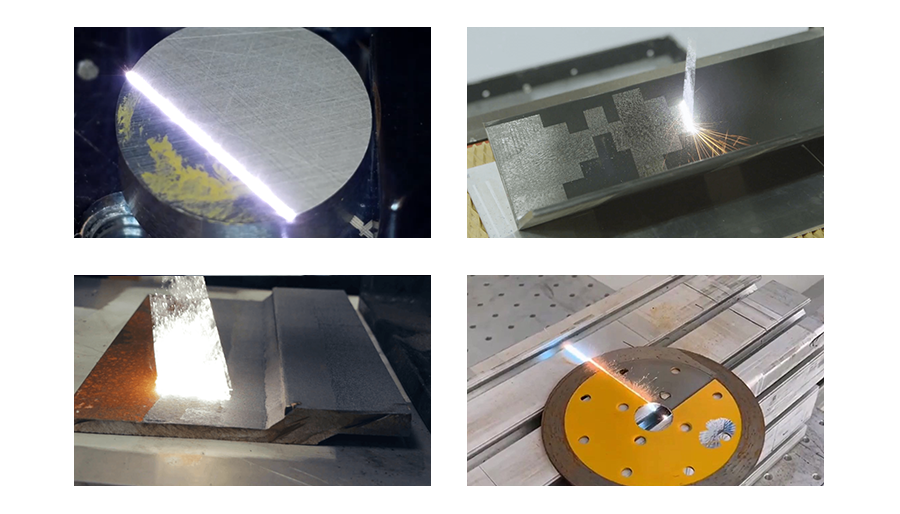
今天,正运动技术为大家分享一下应用ZMC408SCAN开放式激光振镜运动控制器的C++开发,实现激光振镜打标 ,可在文章末尾扫码获取例程源码。
除了C++还支持使用其他上位机软件来开发,上位机程序运行时需要动态库“zmotion.dll”,上位机开发调试时可以把ZDevelop软件同时连接到控制器辅助调试。
01 ZMC408SCAN控制器介绍
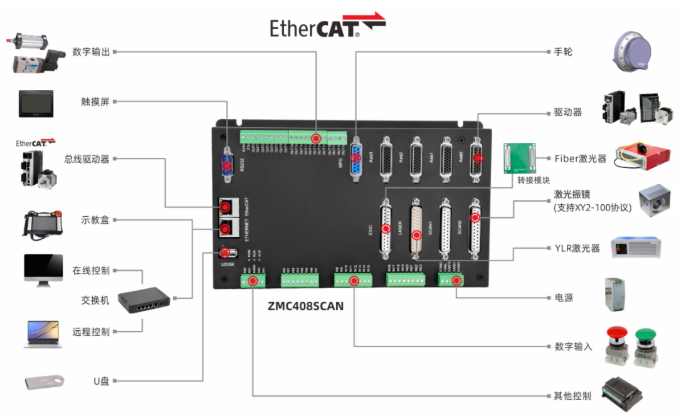
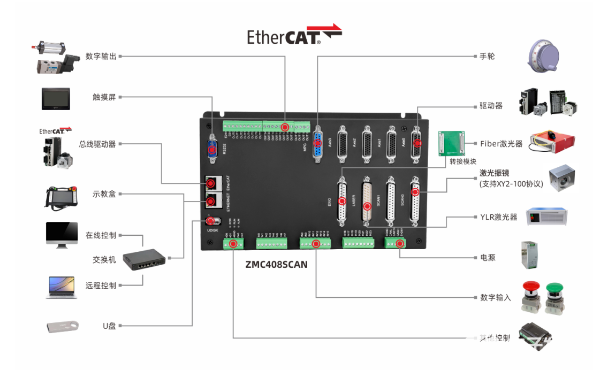
ZMC408SCAN是正运动技术新推出的一款支持EtherCAT总线的开放式激光振镜运动控制器,专为工业激光+振镜+运动控制方面的应用而设计。通过EtherCAT总线和脉冲轴接口能实现多轴联动运动控制。
ZMC408SCAN支持ETHERNET、EtherCAT、USB、CAN、RS485、RS232等通讯接口,通过CAN、EtherCAT总线可以连接各个扩展模块,从而扩展数字量、模拟量或运动轴。
(1)ZMC408SCAN内置高精度PSO位置同步输出功能,在加工圆角、曲线部分时即使进行了减速调整,在高速加工的场合,也能控制激光输出的间距保持恒定;
(2)支持激光振镜控制和振镜反馈,包含2个振镜接口,支持2D振镜和3D振镜,配合不带加减速的运动指令MOVESCAN,拐角处振镜加工自动延时,完成精准高效的激光控制,提高激光加工设备的产能;
(3)通过指令在运动中灵活的调节激光开光/关光延时,响应快,精确到us级别的控制,且设置过程简单,大大缩短了工程师的调参时间;
(4)自带LASER激光器控制接口,支持IPG、YLR、YLS等类型激光电源,还带一个EXIO扩展IO接口,通过定制转接板,灵活控制市场上主流的各种激光器;
(5)支持PC同时控制16个ZMC408SCAN控制器同时工作,形成一种振镜阵列的激光加工;
(6)板载4路高速差分脉冲输出,并带4路高速差分编码器反馈,支持EtherCAT总线驱动器的控制,支持5轴XYZAC轴的插补,支持振镜轴与运动轴混合插补。
(7)支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等多种运动控制功能。
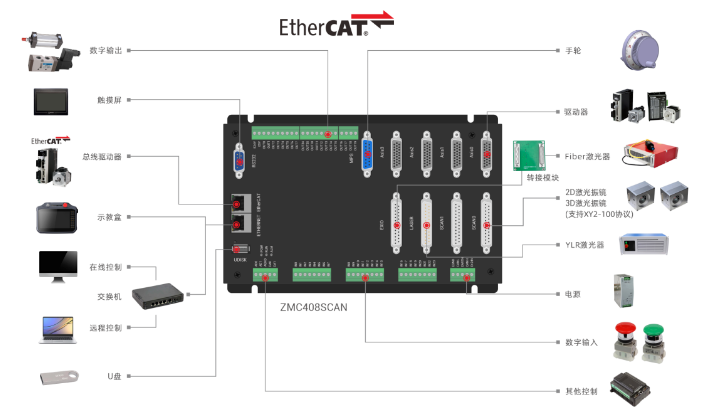
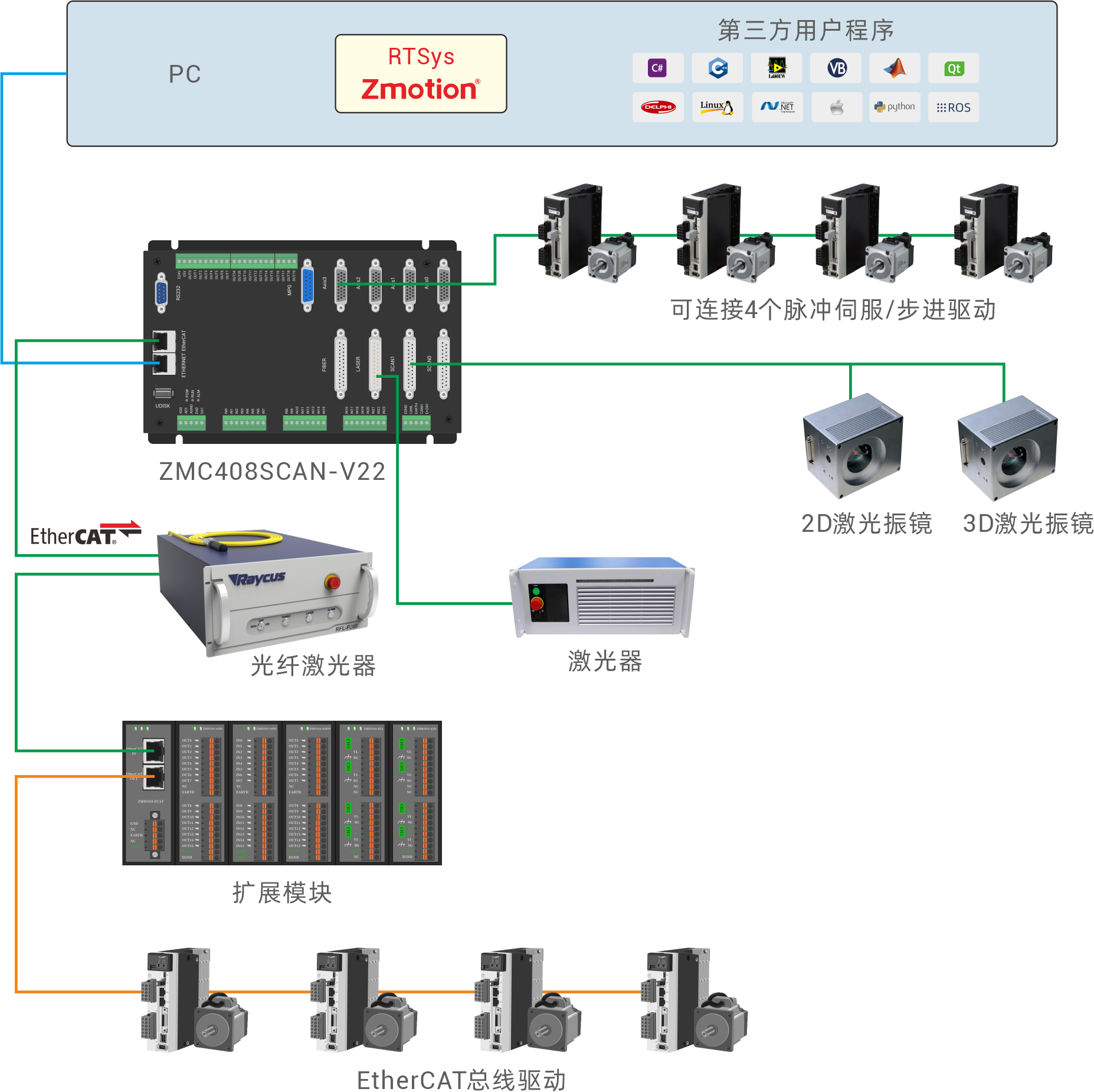
02 系统架构
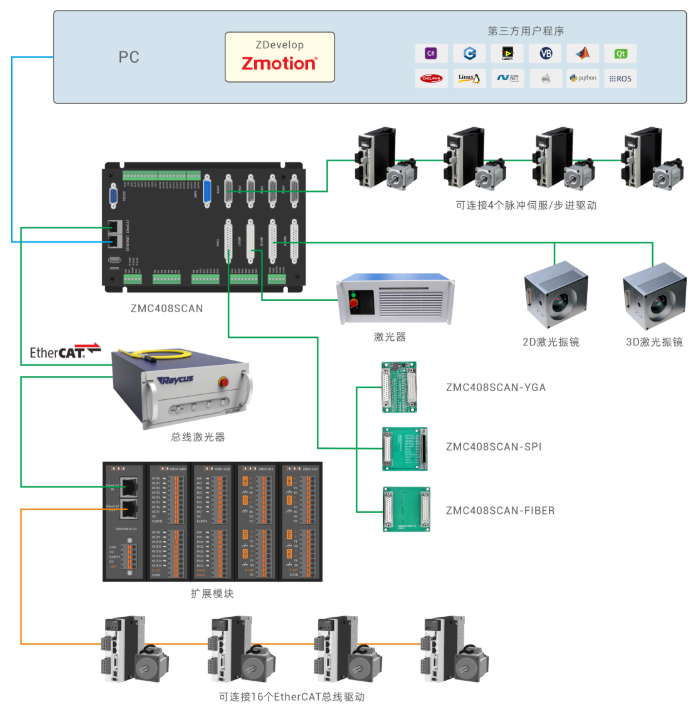
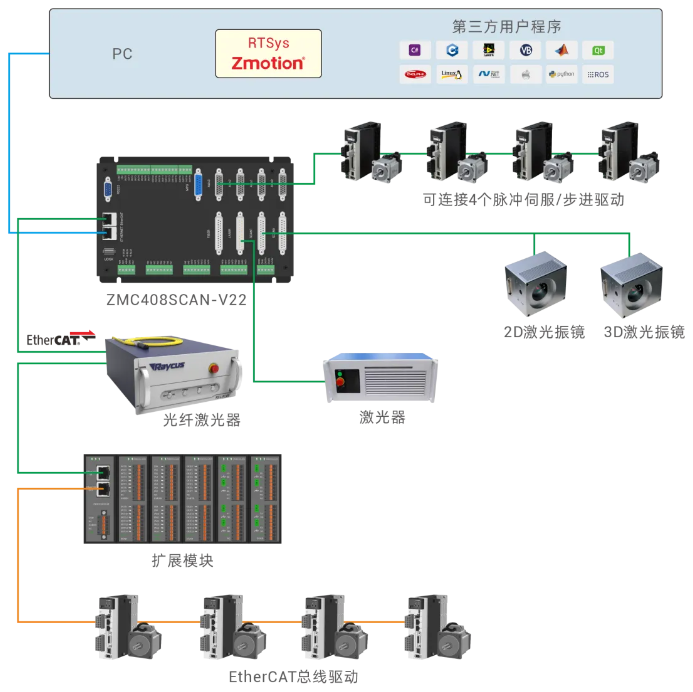
下图为ZMC408SCAN开放式激光 控制器的参考架构,支持多种不同类型的激光器控制。
03 上位机和控制器通讯
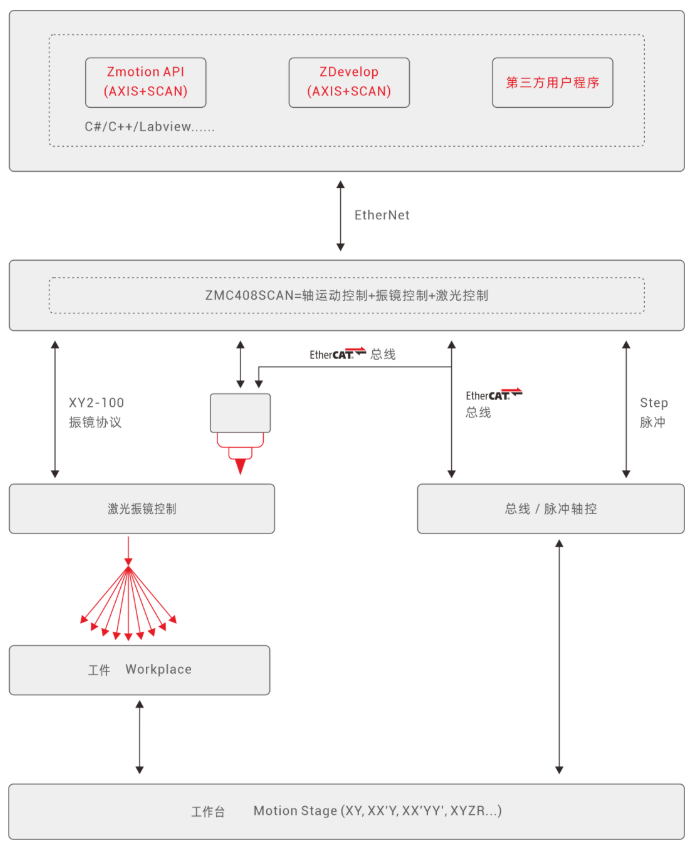
上位机和控制器通讯调用正运动封装好的函数库,提供运动控制和激光控制等众多函数库接口,激光振镜的系统架构参见下图。
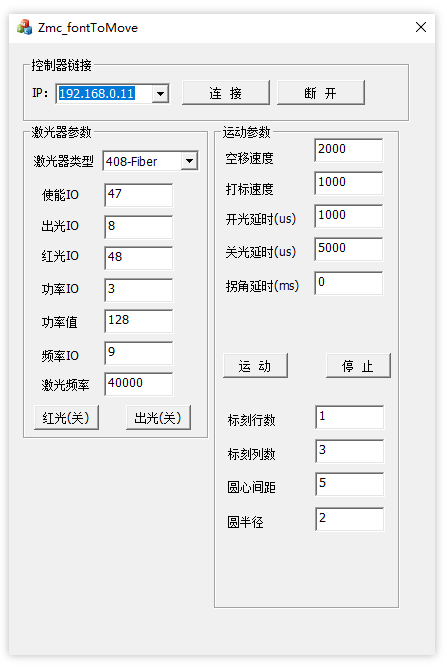
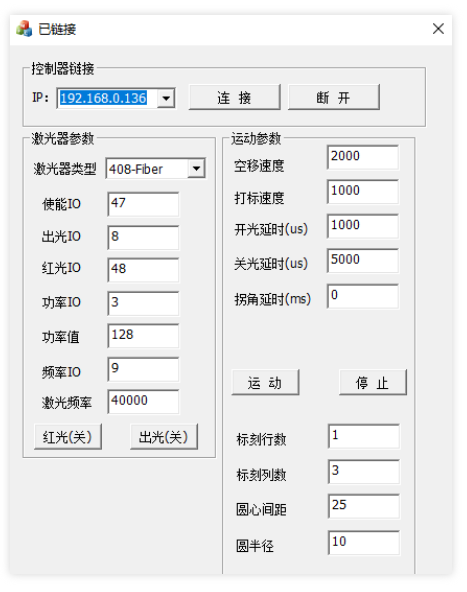
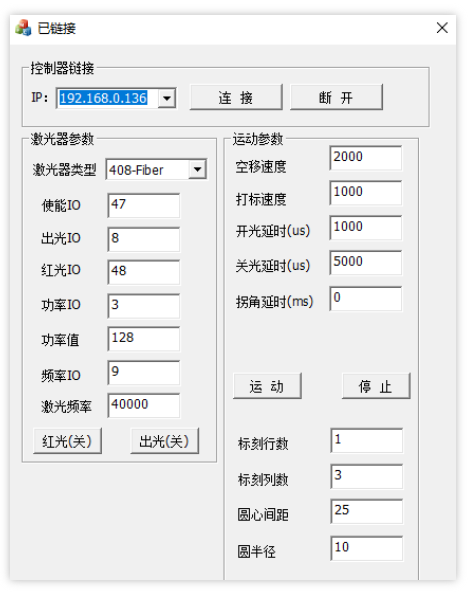
本例采用EtherNET网口连接控制器,通过函数ZAux_OpenEth()建立通讯连接,用户可在设置好的界面中选择当前网段下的控制器IP完成连接,控制器出厂IP地址192.168.0.11,参见下图。
04 激光控制
一、指令介绍
下面是我们程序中用到的接口函数,主要包含激光控制和激光振镜控制两部分,程序的实现可直接使用封装好的接口函数发送命令给控制器 。
本例采用FIBER激光器和2D激光振镜,用到下面的函数接口:
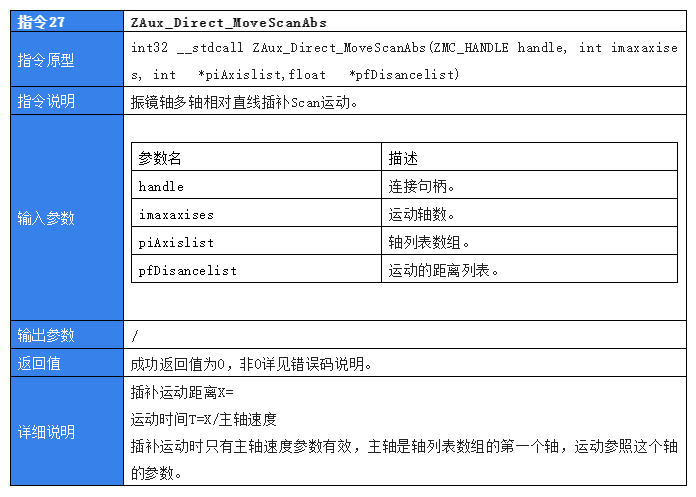
ZAux_Direct_MoveScanAbs:振镜轴多轴绝对直线插补SCAN运动,不带加减速过程,我们这里用来控制振镜轴运动,通过小线段的形式拟合圆形轨迹;
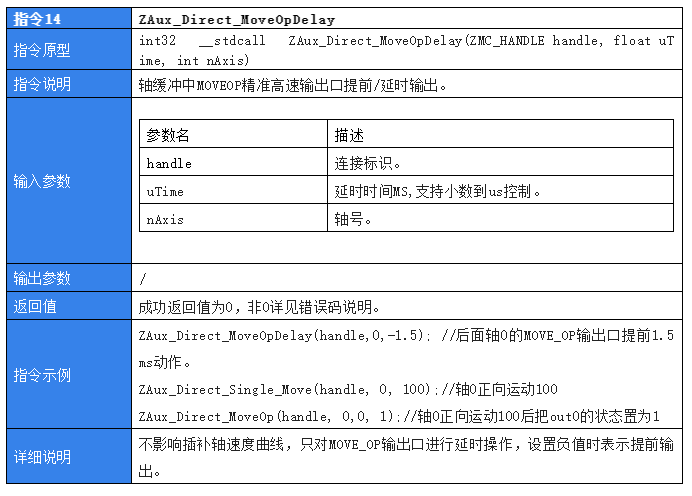
ZAux_Direct_MoveOpDelay:缓冲输出延时,提前开光时将延时时间设置为负数;
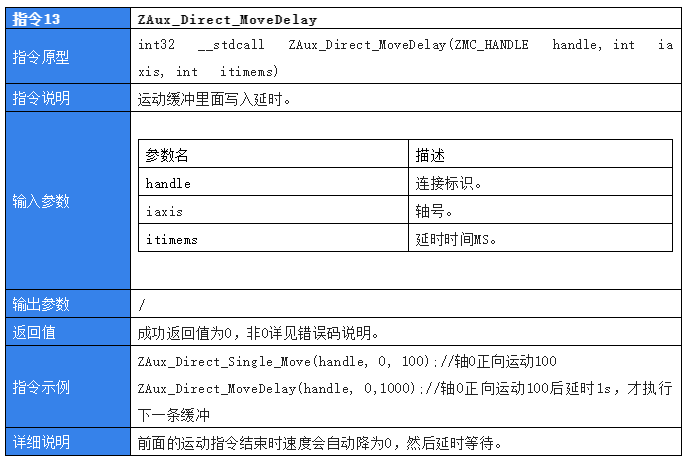
ZAux_Direct_MoveDelay:缓冲输出延时,我们这里用来延时关光。
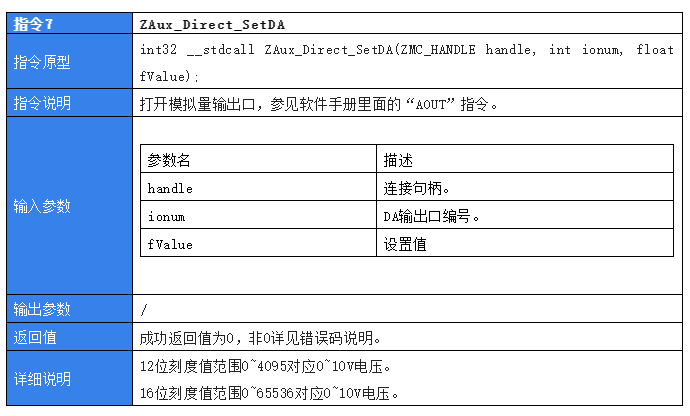
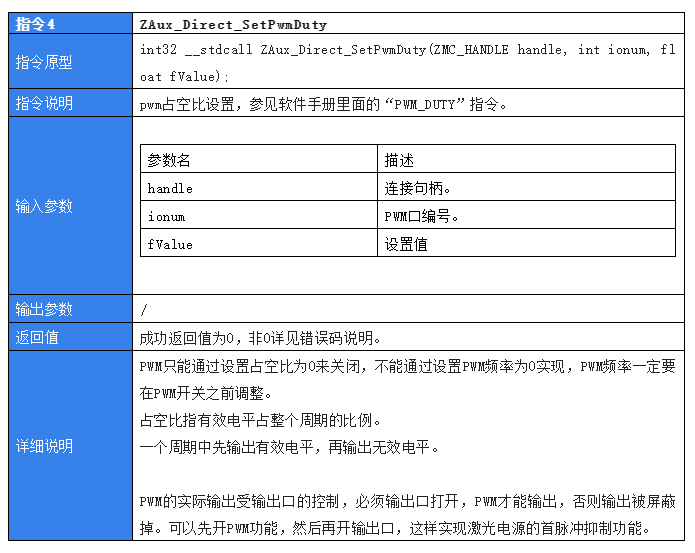
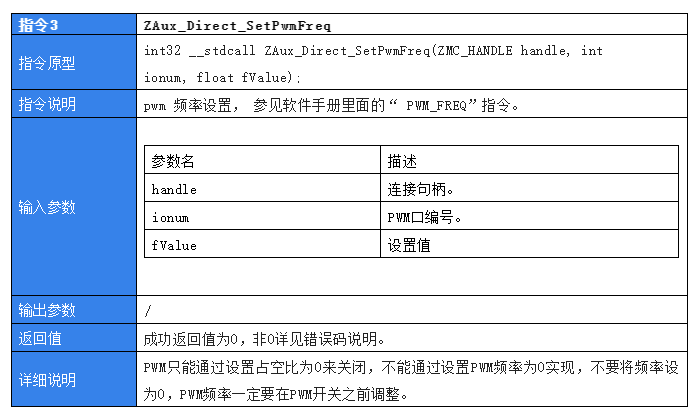
激光功率设置:提供模拟量ZAux_Direct_SetDA、PWM的占空比ZAux_Direct_SetPwmDuty和频率ZAux_Direct_SetPwmFreq等方式控制设置振镜轴拐角处自动延时:
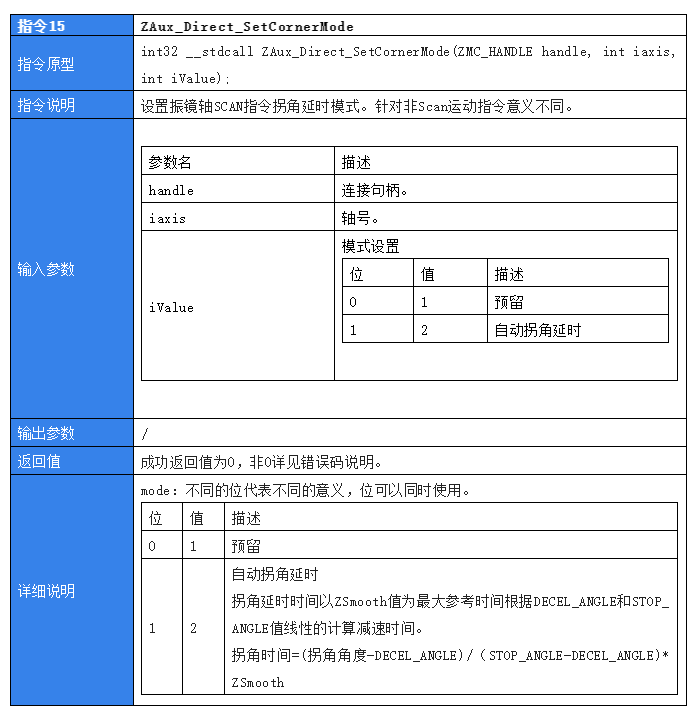
ZAux_Direct_SetCornerMode
1.振镜轴直线插补
ZAux_Direct_MoveScanAbs绝对运动,ZAux_Direct_MoveScan相对运动。
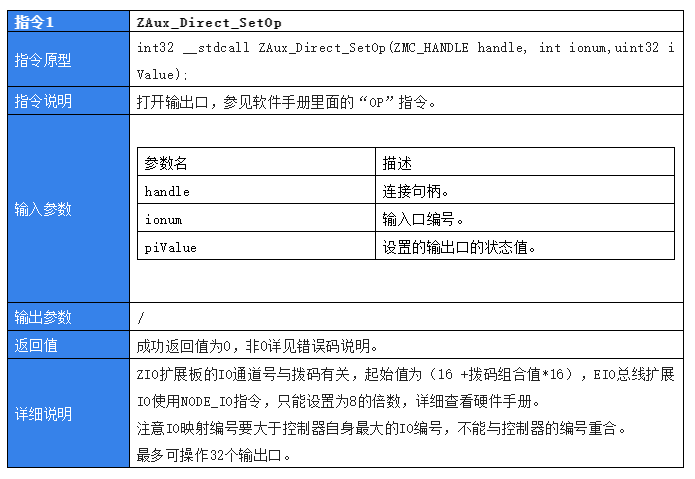
2.设置开关光
输出状态为0关光,输出状态为1开光。
3. 开关光延时
4. 提前/延时开关光
正数时间延时,负数时间提前开关光。
5. 设置激光能量(功率)
通过改变模拟量输出的电压值来控制激光能量大小。
6. PWM占空比
通过设置 PWM 的占空比来调整激光频率,在开始打轨迹之前一定要先设置好。
7. PWM频率
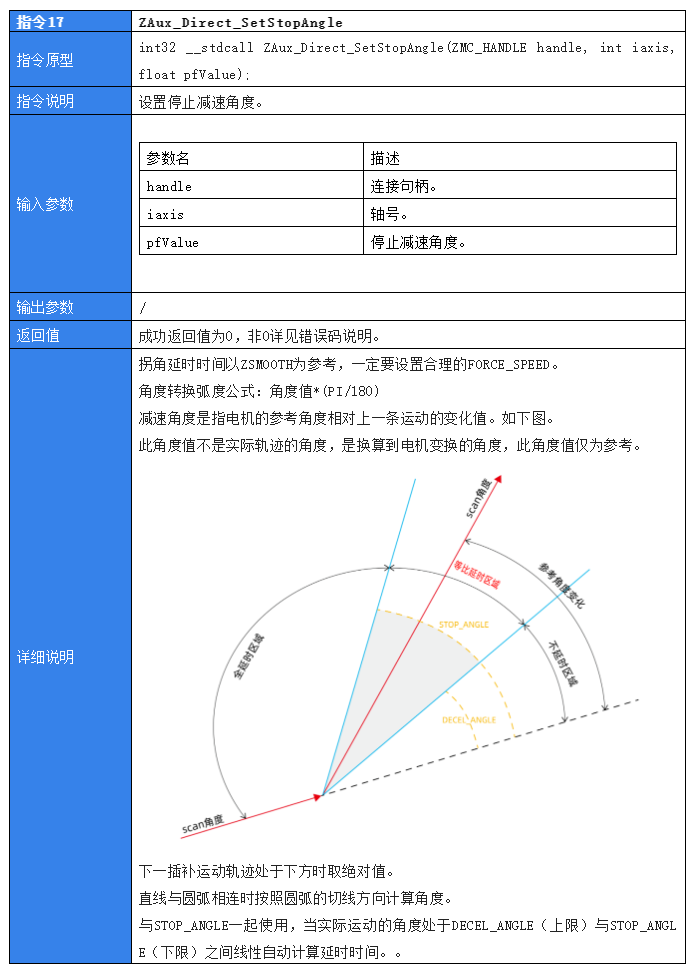
8. 振镜轴拐角延时
9. 拐角延时起始角度
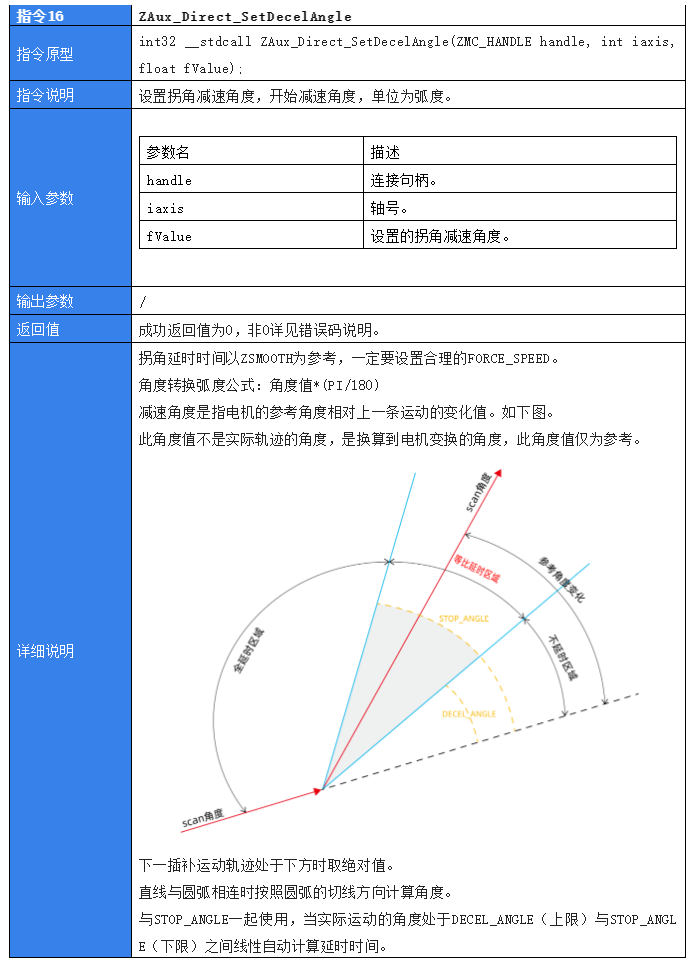
10. 拐角延时结束角度
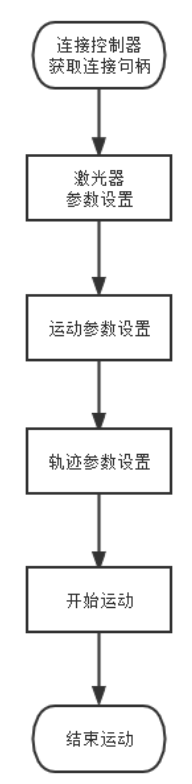
二、程序流程
先建立控制器通讯,获取连接句柄,激光器选择及参数设置,然后编辑红光与激光口控制开关,运动参数设置,轨迹参数进行小线段处理,开始运动,停止运动。
三、主要程序展示
初始化定义相关变量,初始化轴参数,配置好 FIBER 转接板的方向为输出,后续的激光轨迹加工控制由按钮触发。
在运动之前我们要设置好空移速度、打标速度、开关光延时、轨迹圆半径、标刻行列数、圆心距等参数。运动开始直接调用这些相关参数执行,获取完轨迹后调用3次文件执行。
1.初始化408FIBER转换板针脚定义,不同激光器类型定义一套不同的输出口,输出口可以在选择激光器类型后对应在界面上进行修改。
408 FIBER转换板参数初始化程序:
void CZmc_fontToMoveDlg::OnCbnSelchangeComboLaser()
{
// TODO: 在此添加控件通知处理程序代码
UpdateData(TRUE);
if(m_nLaserType == FIBER_408) //408 FIBER转换板参数设置
{
char cmdbuffAck[2048] = "";
int iresult = ZAux_Execute(m_Handle,"EXIO_DIR(0, $8FFFF)",cmdbuffAck,2048);
m_nEnableIO = 47; //使能io
m_nLaserIO = 8; //出关io
m_nRedIO = 48; //红光io
m_nAout = 3; //功率io
m_nPwmIo = 9; //频率io
}
else if(m_nLaserType == YLR_408)
{
m_nEnableIO = 31; //使能io
m_nLaserIO = 8; //出关io
m_nRedIO = 32; //红光io
m_nAout = 2; //功率io
m_nPwmIo = 9; //频率io
}
else if(m_nLaserType == YAG_408) //408 YAG转换板参数设置
{
char cmdbuffAck[2048] = "";
int iresult = ZAux_Execute(m_Handle,"EXIO_DIR(0, $AFBBF)",cmdbuffAck,2048);
m_nEnableIO = 47; //使能io
m_nLaserIO = 8; //出关io
m_nRedIO = 48; //红光io
m_nAout = 3; //功率io
m_nPwmIo = 9; //频率io
}
else if(m_nLaserType == FIBER_504) //504
{
m_nEnableIO = 5; //使能io
m_nLaserIO = 6; //出关io
m_nRedIO = 28; //红光io
m_nAout = 2; //功率io
m_nPwmIo = 7; //频率io
}
UpdateData(FALSE);
}
2.设置拐角延时与激光功率,再调用运动执行,程序如下。
void CZmc_fontToMoveDlg::OnBnClickedBtnMove()
{
// TODO: 在此添加控件通知处理程序代码
UpdateData(TRUE);
//设置拐角减速此ZSMOOTH为拐角延时
int iresult = ZAux_Direct_SetCornerMode(m_Handle,SCAN_AxisX,2);
//设置精准输出
iresult = ZAux_Direct_SetParam(m_Handle,"AXIS_ZSET",SCAN_AxisX,3);
//设置拐角延时
iresult = ZAux_Direct_SetZsmooth(m_Handle,SCAN_AxisX,m_nCorDelay);
//设置拐角起始角度,减速时间在DecelAngle-StopAngle线性变化
iresult = ZAux_Direct_SetDecelAngle(m_Handle,SCAN_AxisX,0); //设置拐角结束角度
iresult = ZAux_Direct_SetStopAngle(m_Handle,SCAN_AxisX,90/180*3.1415926);
//设置激光功率
iresult = ZAux_Direct_SetDA(m_Handle,m_nAout,m_nAoutVal);
//设置激光频率
iresult = ZAux_Direct_SetPwmDuty(m_Handle,m_nPwmIo,0.5);
iresult = ZAux_Direct_SetPwmFreq(m_Handle,m_nPwmIo,m_nPwmFreq);
//获取轨迹数据,(0,0)为圆外接起点,5*5间距画半径为5的小圆
Cal_WorkData(m_fStartX, m_fStartY, m_nStepDis, m_nColNum, m_nRowNum, m_fRadius);
Run_3FileMode();
}
3.圆弧转小线段是将我们的设置的圆弧轨迹转换为小线段存起来,然后转换后由3次文件的形式加载执行。
圆弧转小线段程序如下:
void CZmc_fontToMoveDlg::Cal_WorkData(float fStartX, float fStartY, float iStepDis, int iColNum, int iRowNum, float fRadius) { //圆弧转小线段 int ilen = -1; double ArcX; double ArcY; //获取单个整圆转换长度 int iret = ZMotionOptimize_TransArcSeges(m_Handle,fStartX - fRadius, fStartY, fStartX + fRadius, fStartY + 2 * fRadius, 0, -2 * PI, m_refDistance, &ArcX, &ArcY, &ilen); if (iret != 0 || ilen < 0) { CString StrErr; StrErr.Format("圆弧转小线段失败错误码:%d",iret); MessageBox(StrErr); return; } double *ArcToLineX; double *ArcToLineY; ArcToLineX = (double*)malloc(sizeof(double)*ilen); ArcToLineY = (double*)malloc(sizeof(double)*ilen); //获取数据 iret = ZMotionOptimize_TransArcSeges(m_Handle, fStartX - fRadius, fStartY, fStartX + fRadius, fStartY + 2 * fRadius, 0, -2 * PI, m_refDistance, ArcToLineX, ArcToLineY, &ilen); //轨迹总长度 m_GraphTotalLen = ilen * iColNum * iRowNum; m_GraphData = (struct_GraphPos*)malloc(sizeof(struct_GraphPos)*m_GraphTotalLen); //申请分配内存 //填写数据 int iAcr = 0; for (int icol = 0; icol < iColNum ; icol++) { for(int irow = 0 ;irow
4.这里程序完成空移,然后移动完成之前,如果下一条运动指令执行的是轨迹运动,那么提前将激光打开。
//空移到打标点起始点
void CZmc_fontToMoveDlg::Zscan_Z3pFile_StartString(struct_GraphPos *iGraphData)
{
char cmdbuff[2048] = "";
char tempbuff[2048] = "";
//生成命令
sprintf(tempbuff, "BASE(%d,%d)n",SCAN_AxisX,SCAN_AxisY); //设置打标轴
strcat(cmdbuff, tempbuff);
//空移到起点
sprintf(tempbuff, "FORCE_SPEED = %fn",m_dEmpSpeed); //设置空移速度
strcat(cmdbuff, tempbuff);
sprintf(tempbuff, "MOVESCANABS(%f,%f)n",(*iGraphData).fposx,(*iGraphData).fposy); //移动
strcat(cmdbuff, tempbuff);
//设置提前开光
if (m_nStartDelay < 0) //提前出光
{
sprintf(tempbuff, "MOVEOP_DELAY = %fn",m_nStartDelay/1000);
strcat(cmdbuff, tempbuff);
}
else
{
sprintf(tempbuff, "MOVE_DELAY(%f)n",m_nStartDelay/1000);
strcat(cmdbuff, tempbuff);
}
//开光
sprintf(tempbuff, "MOVE_OP(%d,1)nMOVE_DELAY(10)nMOVE_OP(%d,1)n",m_nEnableIO,m_nLaserIO);
strcat(cmdbuff, tempbuff);
//判断命令长度是否发送
strcat(g_MoveStr,cmdbuff);
Zscan_Z3pFile_Down();
}
//生成打标直线段字符串
void CZmc_fontToMoveDlg::Zscan_Z3pFile_LineString(struct_GraphPos *iGraphData)
{
char cmdbuff[2048] = "";
char tempbuff[2048] = "";
//生成命令
//空移到起点
sprintf(tempbuff, "FORCE_SPEED = %fn",m_dSpeed); //设置打标速度
strcat(cmdbuff, tempbuff);
sprintf(tempbuff, "MOVESCANABS(%f,%f)n",(*iGraphData).fposx,(*iGraphData).fposy); //移动
strcat(cmdbuff, tempbuff);
//判断命令长度是否发送
strcat(g_MoveStr,cmdbuff);
Zscan_Z3pFile_Down();
}
5.延时关光是在打标轨迹完成后,将激光延时关闭。
延时关光程序如下:
void CZmc_fontToMoveDlg::Zscan_Z3pFile_EndString(struct_GraphPos *iGraphData)
{
char cmdbuff[2048] = "";
char tempbuff[2048] = "";
//生成命令
sprintf(tempbuff, "FORCE_SPEED = %fn",m_dEmpSpeed); //设置空移速度
strcat(cmdbuff, tempbuff);
sprintf(tempbuff, "MOVESCANABS(%f,%f)n",(*iGraphData).fposx,(*iGraphData).fposy); //移动
strcat(cmdbuff, tempbuff);
//延时关光
if(m_nLastDelay >0)
{
//延时关光
sprintf(tempbuff, "MOVEOP_DELAY = 0nMOVE_DELAY(%f)n",m_nLastDelay/1000);
strcat(cmdbuff, tempbuff);
}
else
{
sprintf(tempbuff, "MOVEOP_DELAY = %fn",m_nLastDelay/1000);
strcat(cmdbuff, tempbuff);
}
//关光
sprintf(tempbuff, "MOVE_OP(%d,OFF)n",m_nLaserIO);
strcat(cmdbuff, tempbuff);
//判断命令长度是否发送
strcat(g_MoveStr,cmdbuff);
Zscan_Z3pFile_Down();
}
四、最终效果
首先点击下拉框选择控制器IP,点击连接,依次设置好激光器参数、运动参数,设置好后输入打轨迹的参数,点击运动开始打圆形轨迹,点击停止结束。
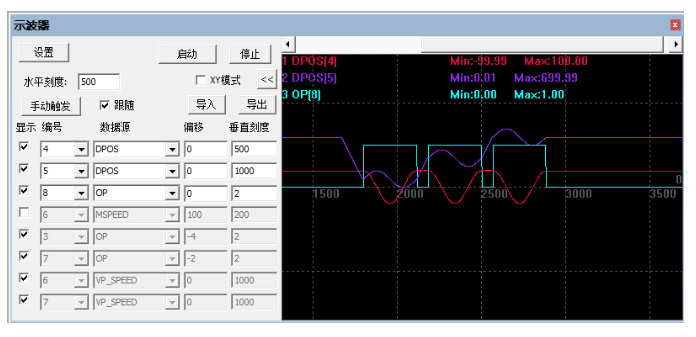
通过 Z develop 软件的示波器采样运动结果:先从其他位置空移到起始位置,然后提前 1ms 开光,走完一个圆形轨迹,关闭激光(延时关光),再空移到下一个圆形轨迹的起点,开光(提前 1ms 开光) , 又走完一个轨迹后,关光(延时 5ms 关光),如此循环执行,直到设置的行列数打完停止(打轨迹中也能点击停止)。
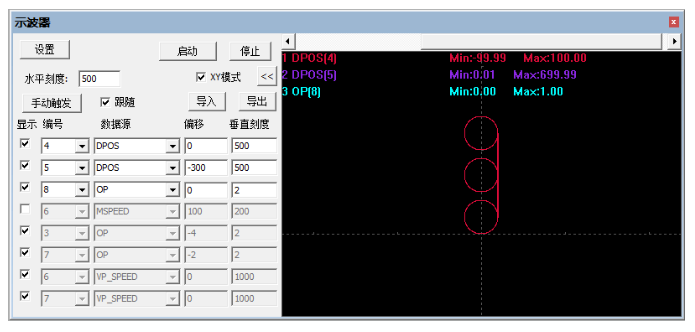
XY模式下的轨迹,轨迹包括了圆形打标轨迹和空走轨迹:
本次,正运动技术开放式激光振镜运动控制器:C++快速开发,就分享到这里。
审核编辑:汤梓红
-
控制器
+关注
关注
114文章
17638浏览量
190164 -
C++
+关注
关注
22文章
2122浏览量
76694 -
EtherCAT总线
+关注
关注
5文章
90浏览量
5904
发布评论请先 登录

开放式激光振镜+运动控制器(五):ZMC408SCAN控制器








 工商网监
工商网监
评论