 关于网卡的收发包硬件中断
关于网卡的收发包硬件中断

中断(IRQ),尤其是软中断(softirq)的重要使用场景之一是网络收发包, 但并未唯一场景。本文整理 IRQ/softirq 的通用基础,这些东西和网络收发包没有直接关系, 虽然整理本文的直接目的是为了更好地理解网络收发包。
什么是中断?
CPU 通过时分复用来处理很多任务,这其中包括一些硬件任务,例如磁盘读写、键盘输入,也包括一些软件任务,例如网络包处理。在任意时刻,一个 CPU 只能处理一个任务。当某个硬件或软件任务此刻没有被执行,但它希望 CPU 来立即处理时,就会给 CPU 发送一个中断请求 —— 希望 CPU 停下手头的工作,优先服务“我”。中断是以事件的方式通知 CPU 的,因此我们常看到 “XX 条件下会触发 XX 中断事件” 的表述。
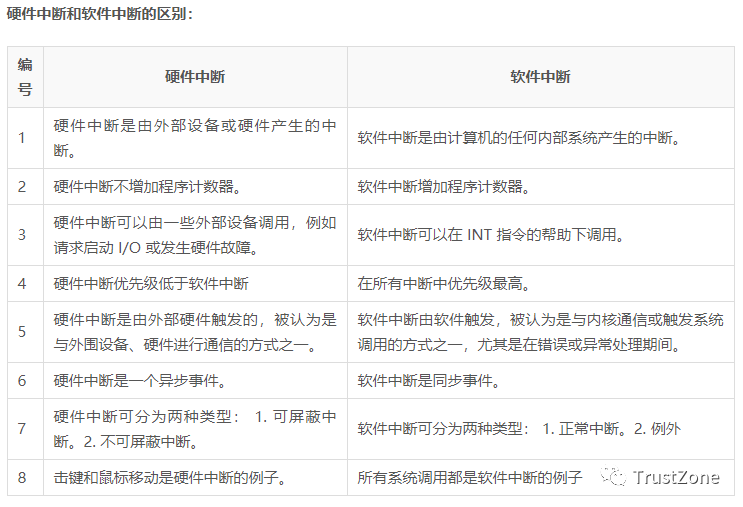
两种类型:
外部或硬件产生的中断,例如键盘按键。
软件产生的中断,异常事件产生的中断,例如除以零 。
管理中断的设备:Advanced Programmable Interrupt Controller(APIC)。
硬中断
中断处理流程
中断随时可能发生,发生之后必须马上得到处理。收到中断事件后的处理流程:
抢占当前任务:内核必须暂停正在执行的进程;
执行中断处理函数:找到对应的中断处理函数,将 CPU 交给它(执行);
中断处理完成之后:第 1 步被抢占的进程恢复执行。
Maskable and non-maskable
Maskable interrupts 在 x64_64 上可以用 sti/cli 两个指令来屏蔽(关闭)和恢复:
staticinlinevoidnative_irq_disable(void){
asmvolatile("cli":::"memory");//清除IF标志位
}
staticinlinevoidnative_irq_enable(void){
asmvolatile("sti":::"memory");//设置IF标志位
}
在屏蔽期间,这种类型的中断不会再触发新的中断事件。大部分 IRQ 都属于这种类型。例子:网卡的收发包硬件中断。
Non-maskable interrupts 不可屏蔽,所以在效果上属于更紧急的类型。
问题:执行足够快 vs 逻辑比较复杂
IRQ handler 的两个特点:
执行要非常快,否则会导致事件(和数据)丢失;
需要做的事情可能非常多,逻辑很复杂,例如收包
这里就有了内在矛盾。
解决方式:延后中断处理(deferred interrupt handling)
传统上,解决这个内在矛盾的方式是将中断处理分为两部分:
top half
bottom half
这种方式称为中断的推迟处理或延后处理。以前这是唯一的推迟方式,但现在不是了。现在已经是个通用术语,泛指各种推迟执行中断处理的方式。按这种方式,中断会分为两部分:
第一部分:只进行最重要、必须得在硬中断上下文中执行的部分;剩下的处理作为第二部分,放入一个待处理队列;
第二部分:一般是调度器根据轻重缓急来调度执行,不在硬中断上下文中执行。
Linux 中的三种推迟中断(deferred interrupts):
softirq
tasklet
workqueue
后面会具体介绍。
软中断
软中断子系统
软中断是一个内核子系统:
1、每个 CPU 上会初始化一个 ksoftirqd 内核线程,负责处理各种类型的 softirq 中断事件;
用 cgroup ls 或者 ps -ef 都能看到:
$systemd-cgls-k|grepsoftirq#-k:includekernelthreadsintheoutput ├─12[ksoftirqd/0] ├─19[ksoftirqd/1] ├─24[ksoftirqd/2] ...
2、软中断事件的 handler 提前注册到 softirq 子系统, 注册方式 open_softirq(softirq_id, handler)
例如,注册网卡收发包(RX/TX)软中断处理函数:
//net/core/dev.c open_softirq(NET_TX_SOFTIRQ,net_tx_action); open_softirq(NET_RX_SOFTIRQ,net_rx_action);
3、软中断占 CPU 的总开销:可以用 top 查看,里面 si 字段就是系统的软中断开销(第三行倒数第二个指标):
$top-n1|head-n3 top-1805up86days,23:45,2users,loadaverage:5.01,5.56,6.26 Tasks:969total,2running,733sleeping,0stopped,2zombie %Cpu(s):13.9us,3.2sy,0.0ni,82.7id,0.0wa,0.0hi,0.1si,0.0st
主处理
smpboot.c 类似于一个事件驱动的循环,里面会调度到 ksoftirqd 线程,执行 pending 的软中断。ksoftirqd 里面会进一步调用到 __do_softirq,
判断哪些 softirq 需要处理,
执行 softirq handler
避免软中断占用过多 CPU
软中断方式的潜在影响:推迟执行部分(比如 softirq)可能会占用较长的时间,在这个时间段内, 用户空间线程只能等待。反映在 top 里面,就是 si 占比。
不过 softirq 调度循环对此也有改进,通过 budget 机制来避免 softirq 占用过久的 CPU 时间。
unsignedlongend=jiffies+MAX_SOFTIRQ_TIME;
...
restart:
while((softirq_bit=ffs(pending))){
...
h->action(h);//这里面其实也有机制,避免softirq占用太多CPU
...
}
...
pending=local_softirq_pending();
if(pending){
if(time_before(jiffies,end)&&!need_resched()&&--max_restart)//避免softirq占用太多CPU
gotorestart;
}
...
硬中断 -> 软中断 调用栈
前面提到,softirq 是一种推迟中断处理机制,将 IRQ 的大部分处理逻辑推迟到了这里执行。两条路径都会执行到 softirq 主处理逻辑 __do_softirq(),
1、CPU 调度到 ksoftirqd 线程时,会执行到 __do_softirq();
2、每次 IRQ handler 退出时:do_IRQ() -> ...。
do_IRQ() 是内核中最主要的 IRQ 处理方式。它执行结束时,会调用 exiting_irq(),这会展开成 irq_exit()。后者会检查是pending 的 softirq,有的话就唤醒:
//arch/x86/kernel/irq.c if(!in_interrupt()&&local_softirq_pending()) invoke_softirq();
进而会使 CPU 执行到 __do_softirq()。
软中断触发执行的步骤
To summarize, each softirq goes through the following stages: 每个软中断会经过下面几个阶段:
通过 open_softirq() 注册软中断处理函数;
通过 raise_softirq() 将一个软中断标记为 deferred interrupt,这会唤醒改软中断(但还没有开始处理);
内核调度器调度到 ksoftirqd 内核线程时,会将所有等待处理的 deferred interrupt(也就是 softirq)拿出来,执行对应的处理方法(softirq handler);
以收包软中断为例, IRQ handler 并不执行 NAPI,只是触发它,在里面会执行到 raise NET_RX_SOFTIRQ;真正的执行在 softirq,里面会调用网卡的 poll() 方法收包。IRQ handler 中会调用 napi_schedule(),然后启动 NAPI poll(),
这里需要注意,虽然 IRQ handler 做的事情非常少,但是接下来处理这个包的 softirq 和 IRQ 在同一个 CPU 运行。这就是说,如果大量的包都放到了同一个 RX queue,那虽然 IRQ 的开销可能并不多,但这个 CPU 仍然会非常繁忙,都花在 softirq 上了。解决方式:RPS。它并不会降低延迟,只是将包重新分发:RXQ -> CPU。
三种推迟执行方式(softirq/tasklet/workqueue)
前面提到,Linux 中的三种推迟中断执行的方式:
softirq
tasklet
workqueue
其中,
softirq 和 tasklet 依赖软中断子系统,运行在软中断上下文中;
workqueue 不依赖软中断子系统,运行在进程上下文中。
softirq
前面已经看到, Linux 在每个 CPU 上会创建一个 ksoftirqd 内核线程。
softirqs 是在 Linux 内核编译时就确定好的,例外网络收包对应的 NET_RX_SOFTIRQ 软中断。因此是一种静态机制。如果想加一种新 softirq 类型,就需要修改并重新编译内核。
内部组织
在内部是用一个数组(或称向量)来管理的,每个软中断号对应一个 softirq handler。数组和注册:
//kernel/softirq.c
//NR_SOFTIRQS是enumsoftirqtype的最大值,在5.10中是10,见下面
staticstructsoftirq_actionsoftirq_vec[NR_SOFTIRQS]__cacheline_aligned_in_smp;
voidopen_softirq(intnr,void(*action)(structsoftirq_action*)){
softirq_vec[nr].action=action;
}
5.10 中所有类型的 softirq:
//include/linux/interrupt.h
enum{
HI_SOFTIRQ=0,//tasklet
TIMER_SOFTIRQ,//timer
NET_TX_SOFTIRQ,//networking
NET_RX_SOFTIRQ,//networking
BLOCK_SOFTIRQ,//IO
IRQ_POLL_SOFTIRQ,
TASKLET_SOFTIRQ,//tasklet
SCHED_SOFTIRQ,//schedule
HRTIMER_SOFTIRQ,//timer
RCU_SOFTIRQ,//lock
NR_SOFTIRQS
};
也就是在 cat /proc/softirqs 看到的哪些。
$cat/proc/softirqs CPU0CPU1...CPU46CPU47 HI:20...01 TIMER:443727467971...313696270110 NET_TX:5791965998...4228754840 NET_RX:287285262341...8110655244 BLOCK:2611564...268986463918 IRQ_POLL:00...00 TASKLET:98207...129122 SCHED:18544271124268...51548045332269 HRTIMER:1222468926...2549724272 RCU:1469356972856...59617375917455
触发(唤醒)softirq
voidraise_softirq(unsignedintnr){
local_irq_save(flags);//关闭IRQ
raise_softirq_irqoff(nr);//唤醒ksoftirqd线程(但执行不在这里,在ksoftirqd线程中)
local_irq_restore(flags);//打开IRQ
}
if(!in_interrupt())
wakeup_softirqd();
staticvoidwakeup_softirqd(void){
structtask_struct*tsk=__this_cpu_read(ksoftirqd);
if(tsk&&tsk->state!=TASK_RUNNING)
wake_up_process(tsk);
}
以收包软中断为例, IRQ handler 并不执行 NAPI,只是触发它,在里面会执行到 raise NET_RX_SOFTIRQ;真正的执行在 softirq,里面会调用网卡的 poll() 方法收包。IRQ handler 中会调用 napi_schedule(),然后启动 NAPI poll()。
tasklet
如果对内核源码有一定了解就会发现,softirq 用到的地方非常少,原因之一就是上面提到的,它是静态编译的, 靠内置的 ksoftirqd 线程来调度内置的那 9 种 softirq。如果想新加一种,就得修改并重新编译内核, 所以开发成本非常高。
实际上,实现推迟执行的更常用方式 tasklet。它构建在 softirq 机制之上, 具体来说就是使用了上面提到的两种 softirq:
HI_SOFTIRQ
TASKLET_SOFTIRQ
换句话说,tasklet 是可以在运行时(runtime)创建和初始化的 softirq,
void__initsoftirq_init(void){
for_each_possible_cpu(cpu){
per_cpu(tasklet_vec,cpu).tail=&per_cpu(tasklet_vec,cpu).head;
per_cpu(tasklet_hi_vec,cpu).tail=&per_cpu(tasklet_hi_vec,cpu).head;
}
open_softirq(TASKLET_SOFTIRQ,tasklet_action);
open_softirq(HI_SOFTIRQ,tasklet_hi_action);
}
内核软中断子系统初始化了两个 per-cpu 变量:
tasklet_vec:普通 tasklet,回调 tasklet_action()
tasklet_hi_vec:高优先级 tasklet,回调 tasklet_hi_action()
structtasklet_struct{
structtasklet_struct*next;
unsignedlongstate;
atomic_tcount;
void(*func)(unsignedlong);
unsignedlongdata;
};
tasklet 再执行针对 list 的循环:
staticvoidtasklet_action(structsoftirq_action*a) { local_irq_disable(); list=__this_cpu_read(tasklet_vec.head); __this_cpu_write(tasklet_vec.head,NULL); __this_cpu_write(tasklet_vec.tail,this_cpu_ptr(&tasklet_vec.head)); local_irq_enable(); while(list){ if(tasklet_trylock(t)){ t->func(t->data); tasklet_unlock(t); } ... } }
tasklet 在内核中的使用非常广泛。不过,后面又出现了第三种方式:workqueue。
workqueue
这也是一种推迟执行机制,与 tasklet 有点类似,但也有很大不同。
tasklet 是运行在 softirq 上下文中;
workqueue 运行在内核进程上下文中;这意味着 wq 不能像 tasklet 那样是原子的;
tasklet 永远运行在指定 CPU,这是初始化时就确定了的;
workqueue 默认行为也是这样,但是可以通过配置修改这种行为。
使用场景
// Documentation/core-api/workqueue.rst: Therearemanycaseswhereanasynchronousprocessexecutioncontext isneededandtheworkqueue(wq)APIisthemostcommonlyused mechanismforsuchcases. Whensuchanasynchronousexecutioncontextisneeded,aworkitem describingwhichfunctiontoexecuteisputonaqueue.An independentthreadservesastheasynchronousexecutioncontext.The queueiscalledworkqueueandthethreadiscalledworker. Whilethereareworkitemsontheworkqueuetheworkerexecutesthe functionsassociatedwiththeworkitemsoneaftertheother.When thereisnoworkitemleftontheworkqueuetheworkerbecomesidle. Whenanewworkitemgetsqueued,theworkerbeginsexecutingagain.
简单来说,workqueue 子系统提供了一个接口,通过这个接口可以创建内核线程来处理从其他地方 enqueue 过来的任务。这些内核线程就称为 worker threads,内置的 per-cpu worker threads:
$systemd-cgls-k|grepkworker ├─5[kworker/0:0H] ├─15[kworker/1:0H] ├─20[kworker/2:0H] ├─25[kworker/3:0H]
结构体
//include/linux/workqueue.h
structworker_pool{
spinlock_tlock;
intcpu;
intnode;
intid;
unsignedintflags;
structlist_headworklist;
intnr_workers;
...
structwork_struct{
atomic_long_tdata;
structlist_headentry;
work_func_tfunc;
structlockdep_maplockdep_map;
};
kworker 线程调度 workqueues,原理与 ksoftirqd 线程调度 softirqs 一样。但是我们可以为 workqueue 创建新的线程,而 softirq 则不行。
-
cpu
+关注
关注
68文章
11327浏览量
225880 -
硬件
+关注
关注
12文章
3631浏览量
69169 -
函数
+关注
关注
3文章
4422浏览量
67836
原文标题:Linux 中断( IRQ / softirq )基础:原理及内核实现
文章出处:【微信号:LinuxHub,微信公众号:Linux爱好者】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
【硬件设计】直放站相关——发包。
关于双网卡的硬件设计
网卡驱动收发包过程 精选资料分享
Windows环境下硬件中断的性能分析
基于智能网卡的无中断通信设计

DPDK安装教程和DPDK程序运行收发包示例程序及性能对比实验的详细概述
STM32的CAN收发数据死在硬件错误中断




评论