 英伟达何以成为车厂自动驾驶开发的首选
英伟达何以成为车厂自动驾驶开发的首选

英伟达在今年的秋季GTC大会上发布了下一代自动驾驶芯片Thor,再次点燃了自动驾驶算力比拼的导火索。我们已经看到国内汽车市场中,蔚来、智已、飞凡等厂商积极在新车型上集成这一代Orin芯片,Thor能收获怎样的市场反响已经可以预知。其实英伟达所做的远不止于此,他们的王牌是一整套DRIVE自动驾驶软硬件生态。
从车端到云端
NAD是蔚来打造的全栈自动驾驶方案,在车身的Aquila超级传感系统上,蔚来选择了33个高性能的传感单元,包括7个800万像素的高分辨率摄像头、4个300万像素的环视专用摄像头、1个1550nm的超长测距激光雷达、5个毫米波雷达、12个USS超声波传感器、两个高精度定位单元(GNSS+IMU)、1个V2X和一个ADMS。
然而,这样庞大的传感系统,也带来了更大的数据吞吐量,根据蔚来的说明,Aquila每秒要传输8GB的数据。要完成如此规模的数据计算量,车身上必须具备强大的算力,所以蔚来的Adam超级计算系统配置了4个英伟达DriveOrin,将算力提高至1016TOPS,以满足自动驾驶的计算要求。
蔚来自动驾驶开发平台/ 蔚来
但自动驾驶从来都不只是车端的工作,如何训练并利用这些得到的数据,提高自动驾驶算法的可靠性,才是厂商们需要持续发力的工作。这里我就拿大家最关注的一个功能来分析一下,AEB紧急制动功能。
蔚来称在研发初期,他们需要在10天内制作出100万个数据分布较好的高质量素材,以求满足最低的精度和时延要求。后续就要在英伟达的GPU上跑AI负载,这个过程需要200个GPU整整运行3个月。
除了训练以外,为了确保NAD在引入新改进后既能解决相应的问题,又不会引入新的问题,蔚来还基于英伟达的开源推理服务器软件Triton打造了一套高性能的推理服务,每天开展10万个推理任务,用于数据挖掘、仿真和回归测试等。
值得一提的是,目前蔚来的NAD尚未正式投入使用,不少人都想知道他们与其他竞争对手公司的自动驾驶系统有何差距。不过蔚来表示,他们的产品团队正在测试NAD与其他自动驾驶方案的性能对比,待报告完成后会公开分享出来。
合成数据加速自动驾驶开发
打从一开始,我们都对合成数据有着或多或少的偏见,认为这是假数据,怎么能用在以安全为第一要义的自动驾驶中呢?但事实上,在物理属性准确的合成数据下,我们甚至可以将其看作是罕见的真实数据。
就拿车祸来说,尽管这是常见道路情况之一,但相对正常驾驶的数据来说,采集到的真实车祸数据在数量上肯定是远远不及的,更别说拿来做仿真训练了,在汽车试验场中测出来的车祸数据也难以代表真实路况数据。至于那些更稀少但又并非不存在的情况,比如货箱、轮胎脱落等,也都是会对自动驾驶场景造成干扰的。
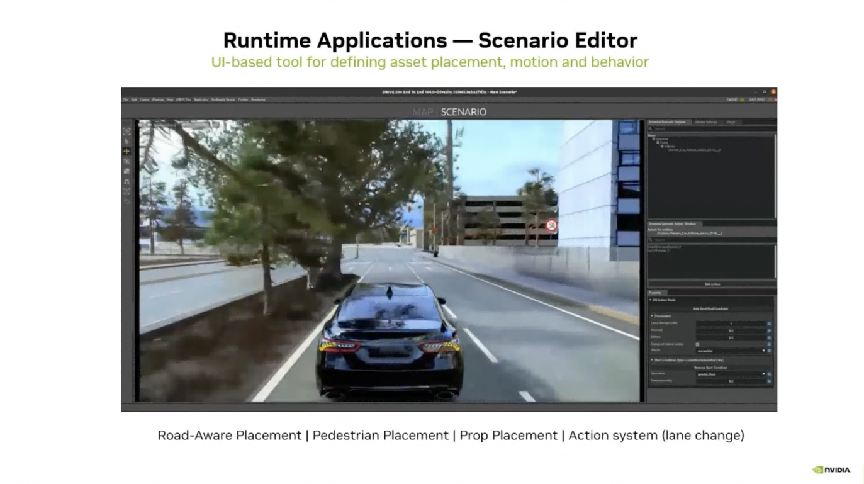
英伟达DRIVE Sim中的DRIVE Replicator就为开发者提供了一个生成各种合成数据集,并具备真值标签的平台,为训练和验证一个覆盖全场景的自动驾驶算法提供帮助。至于合成数据中常见的数据偏见问题,DRIVE Replicator提供了随机化引擎,通过泛化来让虚拟域的数据尽可能涵盖到真实域。DRIVE Sim的场景编辑已经实现了相当优秀的随机化,比如借助SimReadyAPI实时改变自然/人工光线、路况天气等等。
除此之外DRIVE Replicator还可以通过PythonAPI对USD模型和属性实现直接控制来完成随机化,比如随机将一个包含动量数据的物体隔空生成在路面上。尽管这已经超出了真实的范畴,但这对于训练自动驾驶算法对于VRU(弱势道路使用者)的识别相当有用,比如突然出现在汽车后方的小孩等。
至于传感器的仿真建模,英伟达也已经在着手打造自己的一套验证系统,以求在真实环境和仿真环境中,得到相匹配的传感器数据,比如摄像头在麦克佩斯色卡下展现与真实环境一样的色彩和亮度。
DRIVE SIM——英伟达在自动驾驶仿真上的CUDA?
可能从多数人的视角看来,英伟达在汽车上的动作仅仅支持推出自动驾驶芯片而已,就像大多数车厂在发布会上提及的那样,新车型搭载了哪些芯片等等。但事实上英伟达对自动驾驶技术的投入远不只有芯片,英伟达已经基于Omniverse这一技术底座,打造了DRIVE Sim这样一个庞大的互通仿真平台。这对于汽车厂商来说具有很重要的意义,因为不仅是造车新势力,老牌车厂也享受到了英伟达提供的自动驾驶开发工作流带来的便利。
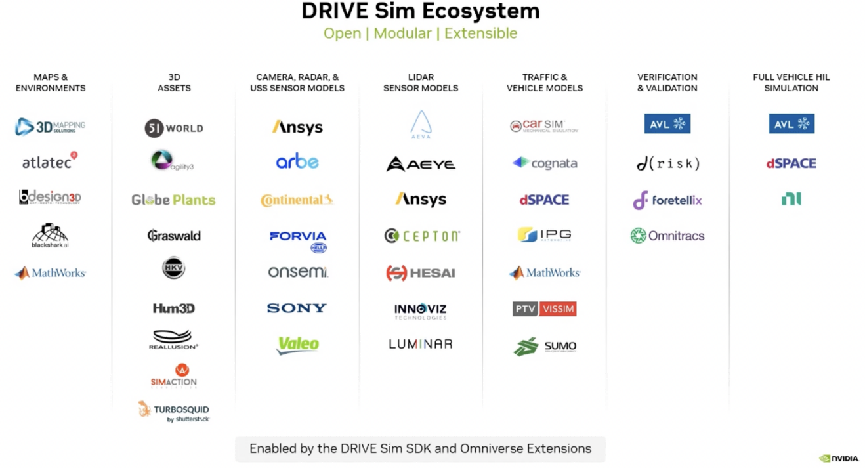
DRIVE Sim合作生态/ 英伟达
比如蔚来等一众造车新势力,他们在自动驾驶传感器的选择上是相当多样化的,而英伟达的DRIVE Sim已经通过一系列API加入了对通用和Hyperion传感器套件的配置和扩展,无疑极大地减轻汽车厂商的开发工作量。而传感器厂商也在积极加入对DRIVE Sim的支持,诸如索尼、禾赛和Luminar等等。一是他们也没有这么多精力来打造这样一个互通的开发生态,二是英伟达在提供传感器开发自由度的同时,也给到了对专有IP的保护,因为英伟达并不需要知道这些传感器的实现方式。
而这样一个软件生态却又与英伟达的硬件息息相关,甚至在新发布的L40等硬件上能发挥出更大的优势,似乎又一个CUDA生态呼之欲出,而这次是出现在自动驾驶上。不由得让人佩服起英伟达,在这些TO B产品的软硬件生态融合上,他们确实是无可匹敌的。
从车端到云端
NAD是蔚来打造的全栈自动驾驶方案,在车身的Aquila超级传感系统上,蔚来选择了33个高性能的传感单元,包括7个800万像素的高分辨率摄像头、4个300万像素的环视专用摄像头、1个1550nm的超长测距激光雷达、5个毫米波雷达、12个USS超声波传感器、两个高精度定位单元(GNSS+IMU)、1个V2X和一个ADMS。
然而,这样庞大的传感系统,也带来了更大的数据吞吐量,根据蔚来的说明,Aquila每秒要传输8GB的数据。要完成如此规模的数据计算量,车身上必须具备强大的算力,所以蔚来的Adam超级计算系统配置了4个英伟达DriveOrin,将算力提高至1016TOPS,以满足自动驾驶的计算要求。
蔚来自动驾驶开发平台/ 蔚来
但自动驾驶从来都不只是车端的工作,如何训练并利用这些得到的数据,提高自动驾驶算法的可靠性,才是厂商们需要持续发力的工作。这里我就拿大家最关注的一个功能来分析一下,AEB紧急制动功能。
蔚来称在研发初期,他们需要在10天内制作出100万个数据分布较好的高质量素材,以求满足最低的精度和时延要求。后续就要在英伟达的GPU上跑AI负载,这个过程需要200个GPU整整运行3个月。
除了训练以外,为了确保NAD在引入新改进后既能解决相应的问题,又不会引入新的问题,蔚来还基于英伟达的开源推理服务器软件Triton打造了一套高性能的推理服务,每天开展10万个推理任务,用于数据挖掘、仿真和回归测试等。
值得一提的是,目前蔚来的NAD尚未正式投入使用,不少人都想知道他们与其他竞争对手公司的自动驾驶系统有何差距。不过蔚来表示,他们的产品团队正在测试NAD与其他自动驾驶方案的性能对比,待报告完成后会公开分享出来。
合成数据加速自动驾驶开发
打从一开始,我们都对合成数据有着或多或少的偏见,认为这是假数据,怎么能用在以安全为第一要义的自动驾驶中呢?但事实上,在物理属性准确的合成数据下,我们甚至可以将其看作是罕见的真实数据。
就拿车祸来说,尽管这是常见道路情况之一,但相对正常驾驶的数据来说,采集到的真实车祸数据在数量上肯定是远远不及的,更别说拿来做仿真训练了,在汽车试验场中测出来的车祸数据也难以代表真实路况数据。至于那些更稀少但又并非不存在的情况,比如货箱、轮胎脱落等,也都是会对自动驾驶场景造成干扰的。
英伟达DRIVE Sim中的DRIVE Replicator就为开发者提供了一个生成各种合成数据集,并具备真值标签的平台,为训练和验证一个覆盖全场景的自动驾驶算法提供帮助。至于合成数据中常见的数据偏见问题,DRIVE Replicator提供了随机化引擎,通过泛化来让虚拟域的数据尽可能涵盖到真实域。DRIVE Sim的场景编辑已经实现了相当优秀的随机化,比如借助SimReadyAPI实时改变自然/人工光线、路况天气等等。
除此之外DRIVE Replicator还可以通过PythonAPI对USD模型和属性实现直接控制来完成随机化,比如随机将一个包含动量数据的物体隔空生成在路面上。尽管这已经超出了真实的范畴,但这对于训练自动驾驶算法对于VRU(弱势道路使用者)的识别相当有用,比如突然出现在汽车后方的小孩等。
至于传感器的仿真建模,英伟达也已经在着手打造自己的一套验证系统,以求在真实环境和仿真环境中,得到相匹配的传感器数据,比如摄像头在麦克佩斯色卡下展现与真实环境一样的色彩和亮度。
DRIVE SIM——英伟达在自动驾驶仿真上的CUDA?
可能从多数人的视角看来,英伟达在汽车上的动作仅仅支持推出自动驾驶芯片而已,就像大多数车厂在发布会上提及的那样,新车型搭载了哪些芯片等等。但事实上英伟达对自动驾驶技术的投入远不只有芯片,英伟达已经基于Omniverse这一技术底座,打造了DRIVE Sim这样一个庞大的互通仿真平台。这对于汽车厂商来说具有很重要的意义,因为不仅是造车新势力,老牌车厂也享受到了英伟达提供的自动驾驶开发工作流带来的便利。
DRIVE Sim合作生态/ 英伟达
比如蔚来等一众造车新势力,他们在自动驾驶传感器的选择上是相当多样化的,而英伟达的DRIVE Sim已经通过一系列API加入了对通用和Hyperion传感器套件的配置和扩展,无疑极大地减轻汽车厂商的开发工作量。而传感器厂商也在积极加入对DRIVE Sim的支持,诸如索尼、禾赛和Luminar等等。一是他们也没有这么多精力来打造这样一个互通的开发生态,二是英伟达在提供传感器开发自由度的同时,也给到了对专有IP的保护,因为英伟达并不需要知道这些传感器的实现方式。
而这样一个软件生态却又与英伟达的硬件息息相关,甚至在新发布的L40等硬件上能发挥出更大的优势,似乎又一个CUDA生态呼之欲出,而这次是出现在自动驾驶上。不由得让人佩服起英伟达,在这些TO B产品的软硬件生态融合上,他们确实是无可匹敌的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
gpu
+关注
关注
28文章
5323浏览量
136213 -
英伟达
+关注
关注
23文章
4128浏览量
99778 -
自动驾驶
+关注
关注
795文章
15057浏览量
181995
发布评论请先 登录
相关推荐
热点推荐
L4级自动驾驶提速,制造链可以提前做哪些升级?
近日,英伟达在GTC开发者大会上宣布扩大其自动驾驶汽车开发业务合作范围,现代、日产、五十铃以及比亚迪、吉利等车企正式加入NVIDIA DRI

自动驾驶汽车如何实现自动驾驶
人类驾驶员而言是非常直观且有效的指令,但对于自动驾驶汽车来说,则意味着需要一套极其复杂的感知、理解与决策链路。 自动驾驶如何看清文字? 自动驾驶汽车感知汉字的第一步是场景文本识别技术,

如何设计好自动驾驶ODD?
为确定自动驾驶的可使用范围,会给自动驾驶设置一个运行设计域(Operational Design Domain,ODD)。ODD的作用就是用来明确自动驾驶在什么情况下能工作,在什么情况下不能工作,给车设定“工作范围”。
纯视觉自动驾驶的优势和劣势有哪些?
[首发于智驾最前沿微信公众号]最近有很多小伙伴在后台询问纯视觉自动驾驶的优劣,纯视觉自动驾驶以其低成本、高冗余的技术路径,正成为自动驾驶现阶段主要的一个发展方向。但它由于在多个场景下的

英伟达选定禾赛为激光雷达合作方 发力L4级自动驾驶
Hyperion 10平台”是一套参考计算与传感器架构,旨在帮助各类车型实现 L4 级自动驾驶,助力汽车制造商和开发者构建安全、可扩展且由人工智能定义的高性能车队。 此次合作里程碑建立在禾赛与英伟
黄仁勋:未来十年很多汽车是自动驾驶 英伟达发布Alpamayo汽车大模型平台
最看好的AI落地场景就是自动驾驶。在演讲中黄仁勋提到,未来十年,世界上很大一部分汽车将是自动驾驶或高度自动驾驶的。你期待吗? 英伟达发布Al
L4级自动驾驶数据采集系统首选
引言:自动驾驶数据采集的核心挑战 随着L4级自动驾驶技术进入商业化落地阶段,如何高效采集并处理海量多源传感器数据成为行业痛点。康谋科技推出的 DATALynx高性能车载服务器 与 BRICK2车规
不同等级的自动驾驶技术要求上有何不同?
谈到自动驾驶,不可避免地会涉及到自动驾驶分级,美国汽车工程师学会(SAE)根据自动驾驶系统与人类驾驶员参与驾驶行为程度的不同,将
自动驾驶仿真测试有什么具体要求?
[首发于智驾最前沿微信公众号]在自动驾驶技术快速迭代、功能边界不断扩展的今天,如何系统、严谨且高效地验证一个自动驾驶系统的性能,成为研发、测试与监管共同面对的核心难题。相较于传统汽车主要关注机械性能

太阳光模拟器 | 在汽车自动驾驶开发中的应用
通过模拟不同地域、不同时间、不同天气下的光照环境,可为汽车自动驾驶开发的传感器校准、算法训练和硬件测试提供标准化、可调控的测试工具。汽车的自动驾驶太阳光模拟器的技

自动驾驶汽车是如何准确定位的?
[首发于智驾最前沿微信公众号]随着自动驾驶技术的快速发展,车辆的精准定位成为安全驾驶与路径规划的核心基础。相比于传统人类驾驶依赖路标和视觉判断,自动

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?
[首发于智驾最前沿微信公众号]自动驾驶技术的发展,让组合辅助驾驶得到大量应用,但现在对于自动驾驶技术的宣传,普遍是在乘用车领域,而对于卡车、矿车的自动驾驶发展,却鲜有提及。其实在卡车、

小鹏汽车在全球AI顶会展示下一代自动驾驶模型
Driving),与Waymo、英伟达、加利福尼亚大学洛杉矶分校(UCLA)、图宾根大学(University of Tuebingen)等来自工业界和学术界的自动驾驶同行共同探讨业界最新AI技术。



评论