 AT指令简介、设计与实现
AT指令简介、设计与实现
1
AT指令简介
AT命令作为主控芯片与通信模块的协议接口,通常使用串口作为通信协议的传输,因此在通信模块中硬件接口通常为串口,这样简化了主控设备的代码开发。
AT指令通常由前缀、主体、结束符构成,其中前缀为“AT”,主体由命令、参数以及数据组成;结束符一般为“ ”。
AT指令的发送内容最多为1056个字符的长度(不包括“AT”,但包括最后的空字符即回车符号)
使用AT指令进行设备的连接通信,AT client与AT server必须共同完成。
即:AT server 必须对接收的AT client的命令进行判断并发送响应给到AT client;AT client 等待响应,并对响应的数据进行解析处理。
当然AT server也可主动发送数据给AT client,AT client对接收的数据进行解析处理。一般是需要用户做出相应操作的情况,例如:WiFi的断开连接等。
因此,AT server发送的数据可以分为两种,一种是响应数据,另一种则是主动发送的数据(URC)。
AT指令集是用于实现设备(AT client)与服务器(AT Server)之前的连接与通信的方式。
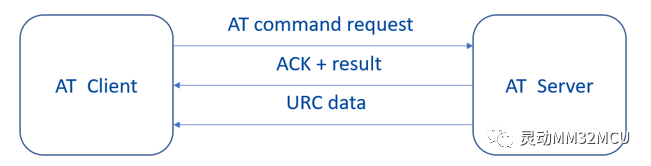
由上图可以看出,AT Client和AT Server既是发送端也是接收端。
AT server需要接收AT Client的请求,对请求进行响应,解析。将响应和解析结果发送给AT client。
2
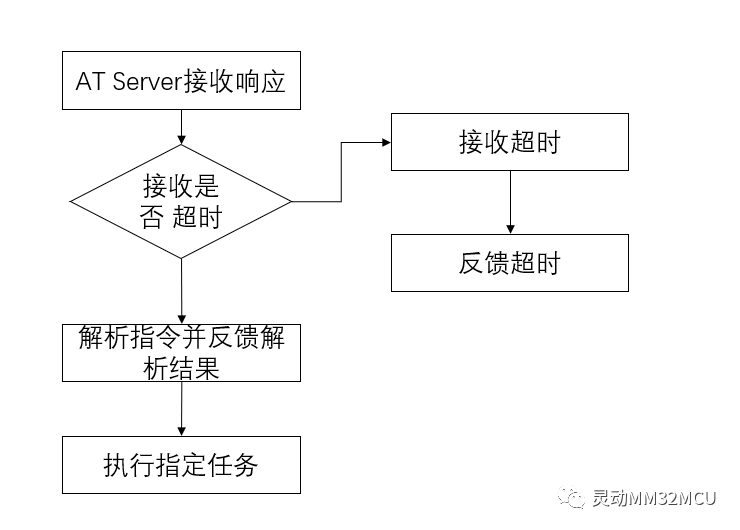
设计思路
通过串口助手发送AT指令给目标mcu,目标mcu对接收的数据进行解析和超时判断,并响应解析结果,执行对应的响应。
设计思路如图所示:
3
具体实现
超时设计
通过滴答定时器进行接收和发送的超时判断。
/*Timeoutjudgment.*/
boolis_timeout(uint32_ttimeout)
{
returntick>timeout;
}
/*SysTickISRentry.*/
voidSysTick_Handler(void)
{
tick+=1;
}
解析器设计
判断接收到正确的AT指令是否超时,若超时则返回超时并发送[AT] TIMEOUT给客户端,清除计数值,同时清空将数据接收缓存区。
将目标mcu接收的数据和发送的AT指令进行比较,若匹配则返回匹配成功并发送“[AT] OK”给客户端,若失败则返回错误”[AT] ERROR“给客户端。
uint32_tat_parse(char*cmdstr,uint32_ttimeout)
{
uint32_tret;
tick=0;
while(!(is_timeout(timeout)))
{
if(REC_STA)/*receiveacompletelinecommand.*/
{
REC_STA=false;
for(uint32_ti=0;i<strlen(cmdstr);i++)
{
tick=0;
if(rec_buff[i]==cmdstr[i])
{
ret=AT_RETURN_OK;
}
else
{
ret=AT_RETURN_ERROR;
}
}
memset(rec_buff,0,sizeof(rec_buff));/*clearreceiverbuffer.*/
returnret;
}
}
tick=0;
ret=AT_RETURN_TIMEOUT;
memset(rec_buff,0,sizeof(rec_buff));/*clearreceiverbuffer.*/
returnret;
}
AT 适配器配置
使用pokt-f0040的默认debug接口,UART1(PB6,和PB7),使用接收中断来接收串口助手发送的数据,具体实现如下:
实例化AT适配器
/*initializetheatadaptter.*/
staticAT_Adapter_Typeat=
{
.write=uart_putchar,
.read=uart_getchar,
.rec_buf=rec_buff,
.buf_idx=0u
};
AT接口初始化 void app_at_port_init(void)
初始化UART需要配置:时钟频率、波特率、数据长度、停止位、传输模式及是否使用校验。
voidapp_at_port_init(void)
{
UART_Init_Typeuart_init;
/*Setupthexferengine.*/
uart_init.ClockFreqHz=BOARD_AT_UART_FREQ;/*48mhz,APB2.*/
uart_init.BaudRate=BOARD_AT_UART_BAUDRATE;
uart_init.WordLength=UART_WordLength_8b;
uart_init.StopBits=UART_StopBits_1;
uart_init.Parity=UART_Parity_None;
uart_init.XferMode=UART_XferMode_RxTx;
uart_init.HwFlowControl=UART_HwFlowControl_None;
UART_Init(BOARD_AT_UART_PORT,&uart_init);
/*EnableRXinterrupt.*/
UART_EnableInterrupts(BOARD_AT_UART_PORT,UART_INT_RX_DONE,true);
NVIC_EnableIRQ(BOARD_AT_UART_IRQn);
/*EnableUART.*/
UART_Enable(BOARD_AT_UART_PORT,true);
/*EnableUART.*/
UART_Enable(BOARD_AT_UART_PORT,true);
}
发送函数 uart_putchar(uint8_t c)
/*sneddata.*/
voiduart_putchar(uint8_tc)
{
while(0u==(UART_STATUS_TX_EMPTY&UART_GetStatus(BOARD_AT_UART_PORT)))/*Waitingtxbufferempty.*/
{}
UART_PutData(BOARD_AT_UART_PORT,c);
}
接收函数 uint8_t uart_getchar(void)
uint8_tuart_getchar(void)
{
while(0u==(UART_STATUS_RX_DONE&UART_GetStatus(BOARD_AT_UART_PORT)))/*Waitingrxbufferreceivesacompletebyteofdata.*/
{}
returnUART_GetStatus(BOARD_AT_UART_PORT);
}
发送字符串函数 void uart_putbuffer(uint8_t *str)
/*sendstring.*/
voiduart_putbuffer(uint8_t*str)
{
while((*str)!='�')
{
uart_putchar(*str);
str++;
}
}
中断处理函数
在中断中进行接收数据的处理,判断是否接收到完整的一行命令.当接收到回车换行符时,即表示接收到了一行完整的命令。
/*receiverhandler*/
voidapp_at_port_rx_isr_hook(void)
{
tick=0;
if((0u!=(UART_INT_RX_DONE&UART_GetEnabledInterrupts(BOARD_AT_UART_PORT)))
&&(0u!=(UART_INT_RX_DONE&UART_GetInterruptStatus(BOARD_AT_UART_PORT))))
{
rec_buff[at.buf_idx]=UART_GetData(BOARD_AT_UART_PORT);/*readdatatoclearrxinterruptbits.*/
uart_putchar(rec_buff[at.buf_idx]);
if((rec_buff[at.buf_idx]=='
')&&(rec_buff[at.buf_idx-1]=='
'))/*recievedone.*/
{
REC_STA=true;
at.buf_idx=0;
}
at.buf_idx=(at.buf_idx+1)%AT_CMD_LEN;
}
}
/*BOARD_AT_UART_IRQHandlerISRentry.*/
voidBOARD_AT_UART_IRQHandler(void)
{
app_at_port_rx_isr_hook();
}
main() 函数
main()函数结合上述操作,不断执行用户自定义的任务task()
intmain(void)
{
BOARD_Init();
while(1)
{
task();
}
}
用户自定义的任务 task()
用户设定接收完整的一行AT指令的时间,调用AT指令解析函数,根据响应结果执行自定义任务。
当接收的命令和发送命令匹配时,串口助手显示[AT]READY。
当匹配失败时,串口助手显示[AT]ERROR,小灯长亮。
当指定时间内(本实验设置为5s)没有接收到完整的一行指令时,串口助手显示[AT]TIMEOUT,小灯以1s间隔闪烁。
voidtask(void)
{
while(AT_Parse(&at,cmdlib[0],5000))
{}
AT_SendBuf(&at,"
[AT]READY
");
while(AT_Parse(&at,cmdlib[1],5000))
{}
GPIO_WriteBit(BOARD_LED0_GPIO_PORT,BOARD_LED0_GPIO_PIN,0u);
}
代码中的“cmdlib”为用户自定义的AT指令库,本此实验中定义的AT指令库为:
/*customATcommandset.*/
char*cmdlib[command_len]={"AT+RST","AT+LED=1"};
task任务解读:
当通过串口发送“AT+RST ”时,mcu响应指令,并反馈响应结果给串口助手,若接收正确指令则执行预设任务,发送[AT] READY给串口助手。
当通过串口发送“AT+LED=1 ”时,mcu响应指令,并反馈响应结果给串口助手,若接收正确指令则执行预设任务,点亮小灯。
4
实验结果
5
测试环境
//
• KEIL 5.37为程序下载调试环境
• Tera Term作为串口数据的发送和显示的客户端
• 测试板为POKT-F0040
审核编辑:汤梓红
-
串口
+关注
关注
14文章
1483浏览量
74514 -
AT指令
+关注
关注
1文章
41浏览量
11993 -
MM32
+关注
关注
1文章
105浏览量
573
原文标题:灵动微课堂 (第227讲) | 基于F0040串口实现AT指令解析
文章出处:【微信号:MindMotion-MMCU,微信公众号:灵动MM32MCU】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
NOP指令实现过程
RISC-V架构简介
时间戳的简介与实现
嵌入式CPU指令Cache的设计与实现
欧盟环保指令简介
DSP常用汇编语言指令简介
Thumb指令集之Thumb指令应用

51单片机指令系统的详细资料简介
基于FPGA的ROM的实现简介

ESP8266官方AT指令的实现方法
汇编指令是什么 计算机语言汇编指令简介





 工商网监
工商网监
评论