 Linux下QT+OpenCV实现人脸实时检测(摄像头)
Linux下QT+OpenCV实现人脸实时检测(摄像头)

一、环境介绍
ubuntu版本: VM虚拟机运行ubuntu18.04 64位
OpenCV版本: 3.4.9
QT版本: 5.12
OpenCV 是 Intel 开源计算机视觉库。它由一系列 C 函数和少量 C++ 类构成,实现了图像处理和计算机视觉方面的很多通用算法。
OpenCV 拥有包括 300 多个 C 函数的跨平台的中、高层 API。它不依赖于其它的外部库 —— 尽管也可以使用某些外部库。OpenCV 对非商业应用和商业应用都是免费(FREE)的。
二、程序思路说明
程序功能: 在子线程里打开摄像头,获取摄像头的数据,通过信号与槽的方式,将摄像头数据传递给主UI界面实时显示,在采用定时器每100ms取一次标签上的数据进行人脸检测处理,将处理的数据再显示到另一个标签上。人脸检测分类器采用OpenCV自带的分类器,程序主要目的是介绍OpenCV配合QT如何进行开发。
三、实现效果
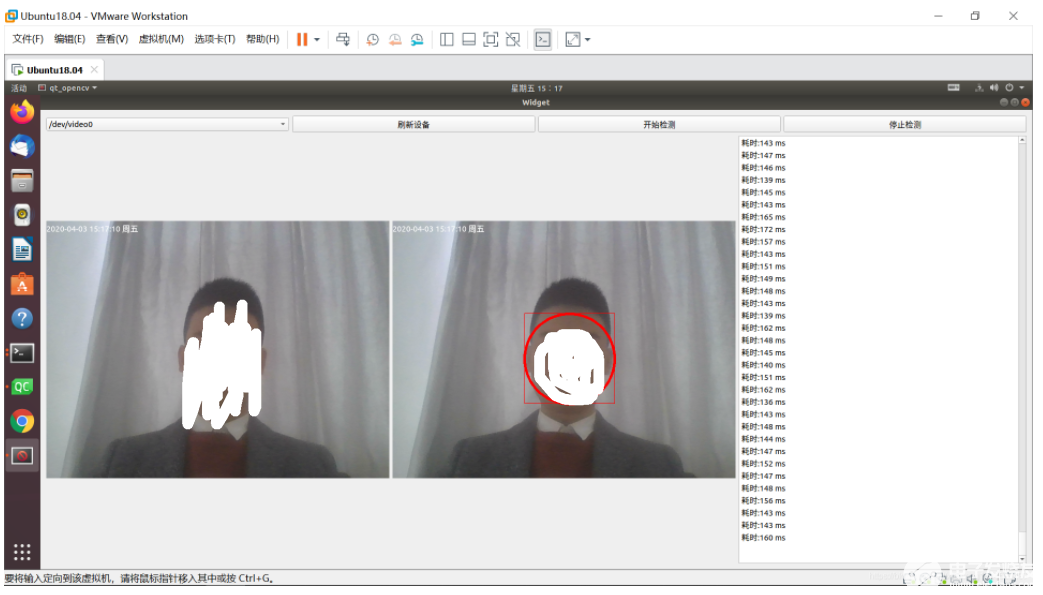
四、核心代码
xxx.pro工程文件:
QT += core gui
QT += multimediawidgets
QT += xml
QT += multimedia
QT += network
QT += widgets
QT += serialport
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
CONFIG += c++11
# The following define makes your compiler emit warnings if you use
# any Qt feature that has been marked deprecated (the exact warnings
# depend on your compiler). Please consult the documentation of the
# deprecated API in order to know how to port your code away from it.
DEFINES += QT_DEPRECATED_WARNINGS
# You can also make your code fail to compile if it uses deprecated APIs.
# In order to do so, uncomment the following line.
# You can also select to disable deprecated APIs only up to a certain version of Qt.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0
SOURCES += \
main.cpp \
widget.cpp
HEADERS += \
widget.h
FORMS += \
widget.ui
# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += target
#linu平台的路径设置
linux {
#添加opencv头文件的路径,需要根据自己的头文件路径进行修改
INCLUDEPATH+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/include\
/home/wbyq/work_pc/opencv-3.4.9/_install/install/include/opencv\
/home/wbyq/work_pc/opencv-3.4.9/_install/install/include/opencv2
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_calib3d.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_core.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_dnn.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_features2d.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_flann.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_highgui.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_imgcodecs.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_imgproc.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_ml.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_objdetect.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_photo.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_shape.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_stitching.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_superres.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_videoio.so
LIBS+=/home/wbyq/work_pc/opencv-3.4.9/_install/install/lib/libopencv_video.so
}
RESOURCES += \
image.qrc
widget.cpp文件代码:
#include "widget.h"
#include "ui_widget.h"
class VideoAudioEncode videoaudioencode_0;
Widget::Widget(QWidget *parent)
: QWidget(parent)
, ui(new Ui::Widget)
{
ui->setupUi(this);
//驾驶室摄像头
//工作对象
videoRead_WorkClass_0=new VideoReadThread_0;
videoRead_Workthread_0=new QThread;
//连接摄像头采集信号,在主线程实时显示视频画面
connect(videoRead_WorkClass_0,SIGNAL(VideoDataOutput(QImage )),this,SLOT(VideoDataDisplay_0(QImage )));
//摄像头初始化函数
connect(this,SIGNAL(Init_VideoAudio_WorkClass_0()),videoRead_WorkClass_0,SLOT(run()));
//停止视频采集
connect(this,SIGNAL(Stop_AudioVideo0_work_0()),videoRead_WorkClass_0,SLOT(stop()));
//将工作对象移动到子线程里工作
videoRead_WorkClass_0->moveToThread(videoRead_Workthread_0);
//更新设备列表
UpdateVideoAudiodDevice(ui->comboBox_video_0,ui->plainTextEdit_log_0);
//
timer.start(100);
connect(&timer,SIGNAL(timeout()), this, SLOT(update()));
timer.start(100);
}
Widget::~Widget()
{
delete ui;
}
//分类器的路径
#define source_xml_addr "/home/wbyq/work_pc/opencv-3.4.9/data/haarcascades_cuda/haarcascade_frontalface_alt2.xml"
//将要检测的图片路径
#define source_pix_addr "/mnt/hgfs/linux-share-dir/1.jpg"
//人脸检测代码
void Widget::opencv_face(QImage qImage)
{
QTime time;
time.start();
static CvMemStorage* storage = 0;
static CvHaarClassifierCascade* cascade = 0;
const char*cascade_name =source_xml_addr;
//加载分类器
cascade = (CvHaarClassifierCascade*)cvLoad( cascade_name, 0, 0, 0 );
if( !cascade )
{
Log_Display_0("分类器加载错误.\n");
return ;
}
//创建内存空间
storage = cvCreateMemStorage(0);
//加载需要检测的图片
//const char* filename =source_pix_addr;
//IplImage* img = cvLoadImage(filename, 1 );
IplImage* img = QImageToIplImage(&qImage);
if(img ==nullptr )
{
Log_Display_0("图片加载错误.\n");
return;
}
double scale=1.2;
static CvScalar colors[] = {
{{0,0,255}},{{0,128,255}},{{0,255,255}},{{0,255,0}},
{{255,128,0}},{{255,255,0}},{{255,0,0}},{{255,0,255}}
};//Just some pretty colors to draw with
IplImage* gray = cvCreateImage(cvSize(img->width,img->height),8,1);
IplImage* small_img=cvCreateImage(cvSize(cvRound(img->width/scale),cvRound(img->height/scale)),8,1);
cvCvtColor(img,gray, CV_BGR2GRAY);
cvResize(gray, small_img, CV_INTER_LINEAR);
cvEqualizeHist(small_img,small_img); //直方图均衡
cvClearMemStorage(storage);
double t = (double)cvGetTickCount();
CvSeq* objects = cvHaarDetectObjects(small_img,
cascade,
storage,
1.1,
2,
0/*CV_HAAR_DO_CANNY_PRUNING*/,
cvSize(30,30));
t = (double)cvGetTickCount() - t;
//遍历找到对象和周围画盒
for(int i=0;i<(objects->total);++i)
{
CvRect* r=(CvRect*)cvGetSeqElem(objects,i);
cvRectangle(img, cvPoint(r->x*scale,r->y*scale), cvPoint((r->x+r->width)*scale,(r->y+r->height)*scale), colors[i%8]);
}
for( int i = 0; i < (objects? objects->total : 0); i++ )
{
CvRect* r = (CvRect*)cvGetSeqElem( objects, i );
CvPoint center;
int radius;
center.x = cvRound((r->x + r->width*0.5)*scale);
center.y = cvRound((r->y + r->height*0.5)*scale);
radius = cvRound((r->width + r->height)*0.25*scale);
cvCircle(img, center, radius, colors[i%8], 3, 8, 0 );
}
show_face(img); //显示检测的结果
cvReleaseImage(&gray);
cvReleaseImage(&small_img);
//释放图片
cvReleaseImage(&img);
Log_Display_0(tr("耗时:%1 ms\n").arg(time.elapsed()));
}
/*将QImage图片转为opecv的qimage格式*/
IplImage *Widget::QImageToIplImage(const QImage * qImage)
{
int width = qImage->width();
int height = qImage->height();
CvSize Size;
Size.height = height;
Size.width = width;
IplImage *IplImageBuffer = cvCreateImage(Size, IPL_DEPTH_8U, 3);
for (int y = 0; y < height; ++y)
{
for (int x = 0; x < width; ++x)
{
QRgb rgb = qImage->pixel(x, y);
CV_IMAGE_ELEM( IplImageBuffer, uchar, y, x*3+0 ) = qBlue(rgb);
CV_IMAGE_ELEM( IplImageBuffer, uchar, y, x*3+1 ) = qGreen(rgb);
CV_IMAGE_ELEM( IplImageBuffer, uchar, y, x*3+2 ) = qRed(rgb);
}
}
return IplImageBuffer;
}
/*将opecv的图片转为qimage格式*/
QImage *Widget::IplImageToQImage(IplImage *img)
{
QImage *qmg;
uchar *imgData=(uchar *)img->imageData;
qmg = new QImage(imgData,img->width,img->height,QImage::Format_RGB888);
*qmg=qmg->rgbSwapped(); //BGR格式转RGB
return qmg;
}
//显示检测的结果
void Widget::show_face(IplImage* img)
{
uchar *imgData=(uchar *)img->imageData;
QImage my_image=QImage(imgData,img->width,img->height,QImage::Format_RGB888);
my_image=my_image.rgbSwapped(); //BGR格式转RGB
QPixmap my_pix; //创建画图类
my_pix.convertFromImage(my_image);
/*在控件上显示*/
ui->label_display->setPixmap(my_pix);
}
//开始采集
void Widget::on_pushButton_Start_clicked()
{
//设置当前选择的摄像头
videoaudioencode_0.camera=video_dev_list.at(ui->comboBox_video_0->currentIndex());
Stop_VideoAudioEncode_0(true);
Start_VideoAudioEncode_Thread_0();
}
//析构函数
VideoReadThread_0::~VideoReadThread_0()
{
}
//停止视频采集
void VideoReadThread_0::stop()
{
qDebug()<<"停止视频采集--stop";
if(camera)
{
camera->stop();
delete camera;
camera=nullptr;
}
if(m_pProbe)
{
delete m_pProbe;
m_pProbe=nullptr;
}
}
//执行线程
void VideoReadThread_0::run()
{
stop();
Camear_Init();
qDebug()<<"摄像头开始采集数据";
}
void VideoReadThread_0::Camear_Init()
{
/*创建摄像头对象,根据选择的摄像头打开*/
camera = new QCamera(videoaudioencode_0.camera);
m_pProbe = new QVideoProbe;
if(m_pProbe != nullptr)
{
m_pProbe->setSource(camera); // Returns true, hopefully.
connect(m_pProbe, SIGNAL(videoFrameProbed(QVideoFrame)),this, SLOT(slotOnProbeFrame(QVideoFrame)), Qt::QueuedConnection);
}
/*配置摄像头捕 QCamera *camera;
QVideoProbe *m_pProbe;获模式为帧捕获模式*/
//camera->setCaptureMode(QCamera::CaptureStillImage); //如果在Linux系统下运行就这样设置
camera->setCaptureMode(QCamera::CaptureVideo);//如果在android系统下运行就这样设置
/*启动摄像头*/
camera->start();
/*设置摄像头的采集帧率和分辨率*/
QCameraViewfinderSettings settings;
settings.setPixelFormat(QVideoFrame::Format_YUYV); //设置像素格式 Android上只支持NV21格式
settings.setResolution(QSize(VIDEO_WIDTH,VIDEO_HEIGHT)); //设置摄像头的分辨率
camera->setViewfinderSettings(settings);
}
/**
* NV21是android相机默认格式
* @param data
* @param rgb
* @param width
* @param height
*/
void NV21_TO_RGB24(unsigned char *yuyv, unsigned char *rgb, int width, int height)
{
const int nv_start = width * height ;
int index = 0, rgb_index = 0;
uint8_t y, u, v;
int r, g, b, nv_index = 0,i, j;
for(i = 0; i < height; i++){
for(j = 0; j < width; j ++){
//nv_index = (rgb_index / 2 - width / 2 * ((i + 1) / 2)) * 2;
nv_index = i / 2 * width + j - j % 2;
y = yuyv[rgb_index];
u = yuyv[nv_start + nv_index ];
v = yuyv[nv_start + nv_index + 1];
r = y + (140 * (v-128))/100; //r
g = y - (34 * (u-128))/100 - (71 * (v-128))/100; //g
b = y + (177 * (u-128))/100; //b
if(r > 255) r = 255;
if(g > 255) g = 255;
if(b > 255) b = 255;
if(r < 0) r = 0;
if(g < 0) g = 0;
if(b < 0) b = 0;
index = rgb_index % width + (height - i - 1) * width;
//rgb[index * 3+0] = b;
//rgb[index * 3+1] = g;
//rgb[index * 3+2] = r;
//颠倒图像
//rgb[height * width * 3 - i * width * 3 - 3 * j - 1] = b;
//rgb[height * width * 3 - i * width * 3 - 3 * j - 2] = g;
//rgb[height * width * 3 - i * width * 3 - 3 * j - 3] = r;
//正面图像
rgb[i * width * 3 + 3 * j + 0] = b;
rgb[i * width * 3 + 3 * j + 1] = g;
rgb[i * width * 3 + 3 * j + 2] = r;
rgb_index++;
}
}
}
/*
函数功能: 将YUV数据转为RGB格式
函数参数:
unsigned char *yuv_buffer: YUV源数据
unsigned char *rgb_buffer: 转换之后的RGB数据
int iWidth,int iHeight : 图像的宽度和高度
*/
void yuyv_to_rgb(unsigned char *yuv_buffer,unsigned char *rgb_buffer,int iWidth,int iHeight)
{
int x;
int z=0;
unsigned char *ptr = rgb_buffer;
unsigned char *yuyv= yuv_buffer;
for (x = 0; x < iWidth*iHeight; x++)
{
int r, g, b;
int y, u, v;
if (!z)
y = yuyv[0] << 8;
else
y = yuyv[2] << 8;
u = yuyv[1] - 128;
v = yuyv[3] - 128;
r = (y + (359 * v)) >> 8;
g = (y - (88 * u) - (183 * v)) >> 8;
b = (y + (454 * u)) >> 8;
*(ptr++) = (r > 255) ? 255 : ((r < 0) ? 0 : r);
*(ptr++) = (g > 255) ? 255 : ((g < 0) ? 0 : g);
*(ptr++) = (b > 255) ? 255 : ((b < 0) ? 0 : b);
if(z++)
{
z = 0;
yuyv += 4;
}
}
}
void VideoReadThread_0::slotOnProbeFrame(const QVideoFrame &frame)
{
QVideoFrame cloneFrame(frame);
cloneFrame.map(QAbstractVideoBuffer::ReadOnly);
//qDebug()<<"height:"label_ImageDisplay_0->pixmap())
opencv_face(ui->label_ImageDisplay_0->pixmap()->toImage());
}
();>(video_dev_list.at(i).devicename());>
widget.h文件代码:
#ifndef WIDGET_H
#define WIDGET_H
#include
//opencv include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
QT_BEGIN_NAMESPACE
namespace Ui { class Widget; }
QT_END_NAMESPACE
class Widget : public QWidget
{
Q_OBJECT
public:
Widget(QWidget *parent = nullptr);
void opencv_face(QImage qImage);
~Widget();
QList video_dev_list;
void show_face(IplImage* img);
class VideoReadThread_0 *videoRead_WorkClass_0; //视频工作类
QThread *videoRead_Workthread_0; //视频线程
/*驾驶室摄像头*/
void Stop_VideoAudioEncode_0(bool flag);//停止线程
void Start_VideoAudioEncode_Thread_0(); //启动线程
void Log_Text_Display(QPlainTextEdit *plainTextEdit_log,QString text);
void UpdateVideoAudiodDevice(QComboBox *comboBox_video, QPlainTextEdit *plainTextEdit_log);
IplImage *QImageToIplImage(const QImage * qImage);
QImage *IplImageToQImage(IplImage *img);
QTimer timer;
signals:
void Init_VideoAudio_WorkClass_0();
void Stop_AudioVideo0_work_0();
private slots:
void update();
void on_pushButton_Start_clicked();
void Log_Display_0(QString text);
void VideoDataDisplay_0(QImage );
void on_pushButton_update_clicked();
void on_pushButton_stop_clicked();
private:
Ui::Widget *ui;
};
class VideoReadThread_0:public QObject
{
Q_OBJECT
public:
QCamera *camera;
QVideoProbe *m_pProbe;
VideoReadThread_0(QObject* parent=nullptr):QObject(parent){camera=nullptr;m_pProbe=nullptr;}
~VideoReadThread_0();
void Camear_Init(void);
public slots:
void stop();
void run();
void slotOnProbeFrame(const QVideoFrame &frame);
signals:
void VideoDataOutput(QImage); //输出信号
};
//视频音频编码类
class VideoAudioEncode
{
public:
QCameraInfo camera; //当前选择的摄像头
};
//视频输出尺寸
#define VIDEO_WIDTH 640
#define VIDEO_HEIGHT 480
extern class VideoAudioEncode videoaudioencode_0;
#endif // WIDGET_H
main.cpp文件代码:
#include "widget.h"
#include
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
Widget w;
w.show();
return a.exec();
}
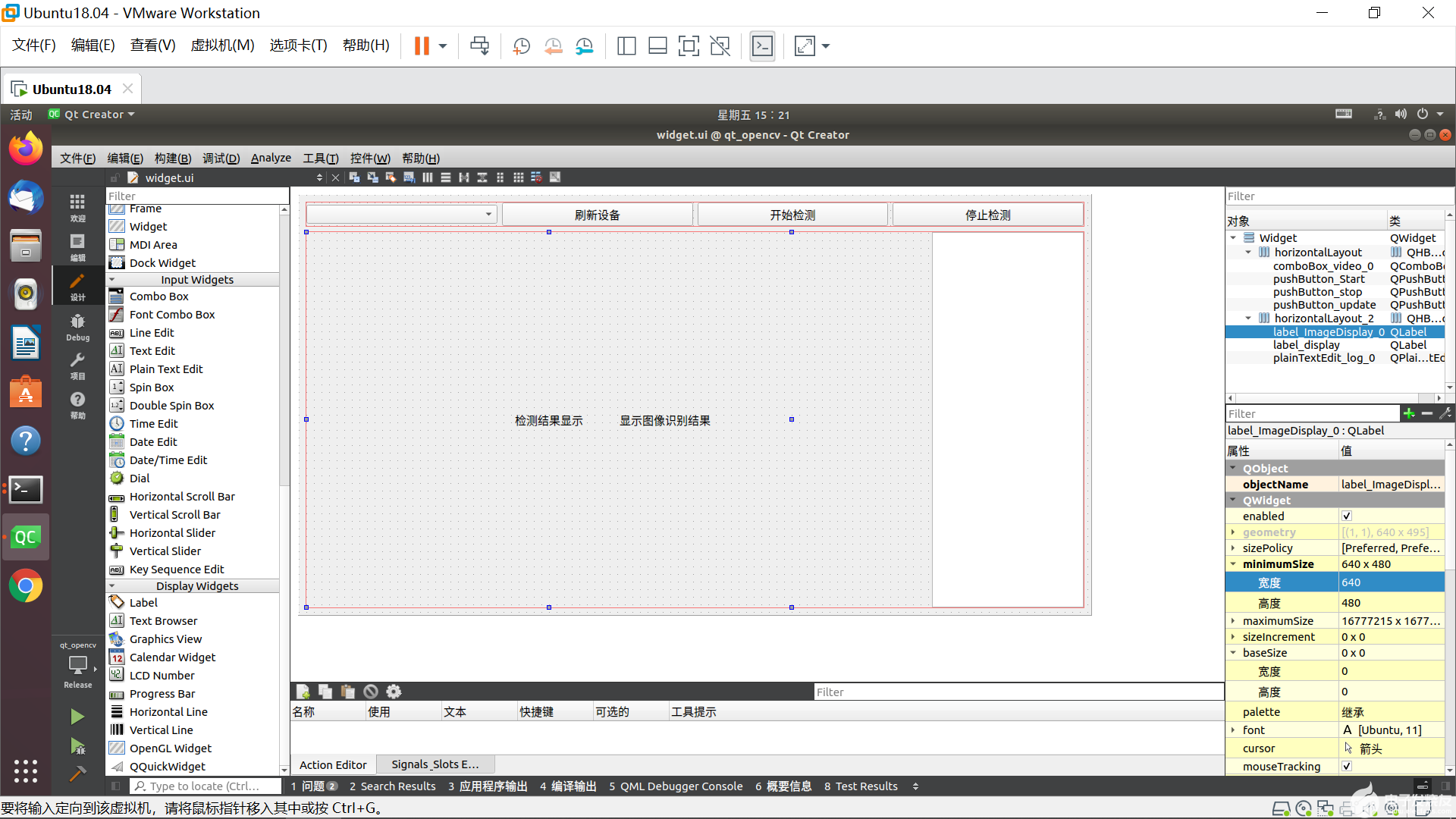
UI界面:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Linux
+关注
关注
88文章
11861浏览量
219850 -
摄像头
+关注
关注
61文章
5133浏览量
103647 -
OpenCV
+关注
关注
33文章
652浏览量
45182
发布评论请先 登录
相关推荐
热点推荐
树莓派上使用OpenCV和Python实现实时人脸检测
理论知识,因此初学者也能轻松跟着步骤实现。 项目所需设备 硬件: 树莓派 3 Model B; 树莓派摄像头模块(PiCam)。 语言和库: OpenCV Python 3 步骤 本文主要讲述如何使用 PiCam
【EASY EAI Nano】RV1126实时读取摄像头并进行yolo检测显示
实现了三个并行模块,分别是
摄像头读取,使用opencv转换到适合大小
yolo检测
托管到Qt进行现实
发表于 01-14 18:53
基于FPGA的摄像头心率检测装置设计
装置, 通过网络摄像头获取人脸视频图像,通过 FPGA 进行分析处理,得到心跳信号, 并将计算得出心率值实时显示在 HDMI 屏幕上。
1.2 应用领域
本作品应用范围广泛,可应用于众多需要
发表于 07-01 17:58
【NanoPi2申请】基于opencv的人脸识别门禁系统
防与监控的系统,望批准!谢谢!项目描述:项目简述:本项目旨在一个较高性能的嵌入式平台上搭建一个linux系统,利用opencv编程实现人脸识别。为了
发表于 12-18 14:34
ESM6802支持Qt摄像头应用
版本。使用Qt的multimedia模块可以方便快捷的进行摄像头应用的开发,本文使用Qt源码中提供的camera例程进行展示,例程代码可从Qt源码中获取或者向我们工程师索要。 我们使
发表于 10-20 10:33
如何快速为 MCU 添加人脸识别摄像头
。如果主机检测到超时(取决于应用要求),主机固件可以重新发送命令,或者通过发送 RESET 命令来复位摄像头。配置摄像头以实现人脸识别启动
发表于 08-01 10:10
基于QT+OpenCv的目标跟踪算法实现
目标跟踪算法作为一种有着非常广泛的应用的算法,在航空航天、智能交通、智能设备等领域有着非常广泛的应用。本系列博客将教大家在410c开发板上基于linux操作系统环境,采用QT+Opencv来实现
发表于 09-21 10:42
【大联大友尚安森美半导体感光芯片USB双目摄像头模组试用体验】开箱报告
` 经过申请,收到了双目摄像头,这次主要是通过双目摄像头搭载linux操作系统,基于Qt+Opencv库进行图形算法的识别。本次很荣幸可以参加这次的试用体验活动。好了,下面就开始对US
发表于 09-02 09:52
【大联大友尚安森美半导体感光芯片USB双目摄像头模组试用体验】使用opencv打开摄像头
因为我们使用的是Qt+opencv 进行摄像头项目环境的搭建去对双目摄像头进行测试。目前我用的是Qt5, opencv 使用的是oepcv3
发表于 09-26 21:54
【大联大友尚安森美半导体感光芯片USB双目摄像头模组测试三】--宠物机器人摄像头人脸采集和识别
镜头,2是右侧镜头,之后会优化本项目代码,将两个摄像头共同调用协同处理采集的画面,这里主要以实现调用和人脸检测为目的。暂不累述。2人脸识别及
发表于 10-20 00:16
基于linux操作系统实现一个人脸识别门禁系统
形成组网,实现一个人脸识别门禁系统。客户端为嵌入式Linux设备,采用QT库显示界面,通过摄像头采集图像。服务器为PC上 Ubuntu系统,
发表于 12-14 06:24
基于QT+OpenCV的人脸识别-米尔iMX8M Plus开发板的项目应用
本篇测评由电子工程世界的优秀测评者“流行科技”提供。此次测试的开源项目,是基于QT+OpenCV的人脸识别打卡项目。本次体验使用的是开源的代码,此代码本来是运行在WIN下的,为了测试稍微进行了修改
发表于 05-17 17:43
实现OpenCV244和VS2010下编制的摄像头摄像程序资料免费下载
本文档的主要内容详细介绍的是实现OpenCV244和VS2010下编制的摄像头摄像程序资料免费下载。
发表于 10-15 15:27
•22次下载
QT+OpenCV人脸识别—米尔iMX8MPlus开发板项目
本篇测评由电子工程世界的优秀测评者“流行科技”提供。 此次测试的开源项目,是基于QT+OpenCV的人脸识别打卡项目。本次体验使用的是开源的代码,此代码本来是运行在WIN下的,为了测试稍微进行了修改




评论