 看看Linux为相机提供的驱动框架
看看Linux为相机提供的驱动框架

前言
前面我们了解了一些相机的基础知识《相机基础知识》。下面来看看Linux为相机提供的驱动框架。
V4L2简介
V4L2 (Video Linux Two),是为支持Linux内核设计的驱动框架驱动框架。为应用设置的操作接口层(ioctl),是在提供更广泛的时候它的设备,它们只有在原件上,才是真正的视频设备,所以它们才是真正的摄像头设计。
V4L2框架
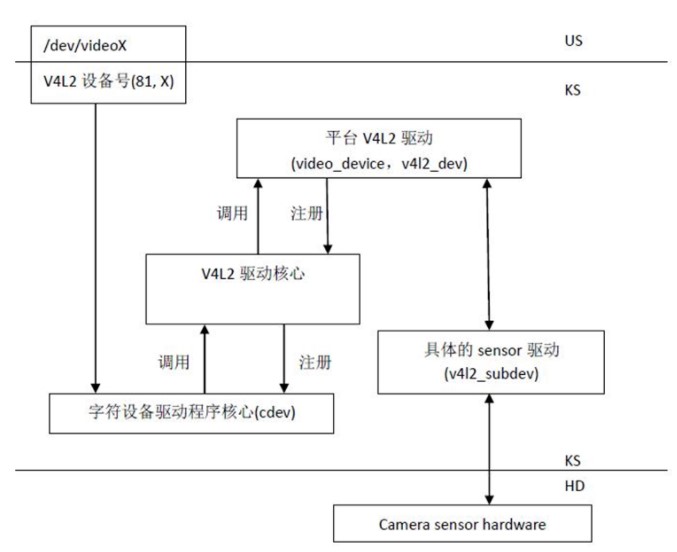
在应用层,可以在 /dev 显示设备节点,程序打开设备设备进行我们的设备目录发现应用程序0、视频画面。video1、video2...这些设备节点是在核心层注册。
v4l2-dev.c) 起承上启下的作用,它会为每一个核心层注册中的设备设置一个统一的 v4l2_fops ,这些统一驱动的接口最终将调用到驱动的 video_device 的 fops 。
重要结构体
视频设备
视频设备
//表示一个视频设备
struct video_device {
#if defined(CONFIG_MEDIA_CONTROLLER);
struct media_entity entity;
struct media_intf_devnode *intf_devnode;
struct media_pipeline pipe;
#endif;
const struct v4l2_file_operations *fops; //文件操作接口(dev/videoX)
u32 device_caps; //设备功能,用于v4l2_capabilities(应用层定义的结构体)
struct device dev;
struct cdev *cdev; //字符设备
struct v4l2_device *v4l2_dev; //V4L2设备
struct device *dev_parent;
struct v4l2_ctrl_handler *ctrl_handler; //设备节点对应的控制句柄
struct vb2_queue *queue;
struct v4l2_prio_state *prio;
char name[32]; //Video设备名称
enum vfl_devnode_type vfl_type; //V4L设备类型
enum vfl_devnode_direction vfl_dir; //V4L 接收者/发送者/m2m
int minor; //子设备号,主设备为81
u16 num;
unsigned long flags;
int index;
spinlock_t fh_lock;
struct list_head fh_list;
int dev_debug;
v4l2_std_id tvnorms;
void (*release)(struct video_device *vdev); //video_device release()回调
const struct v4l2_ioctl_ops *ioctl_ops; //IOCTL回调
unsigned long valid_ioctls[BITS_TO_LONGS(BASE_VIDIOC_PRIVATE)];
struct mutex *lock;
};
v4l2_device
struct v4l2_device {
struct device *dev;
struct media_device *mdev;
struct list_head subdevs; //用于追踪已注册的subdev
spinlock_t lock;
char name[V4L2_DEVICE_NAME_SIZE]; //设备名
void (*notify)(struct v4l2_subdev *sd, unsigned int notification, void *arg);
struct v4l2_ctrl_handler *ctrl_handler; //控制句柄
struct v4l2_prio_state prio; //设备的优先状态
struct kref ref; //引用
void (*release)(struct v4l2_device *v4l2_dev);//引用计数为0后调用
};
嵌入到video_device中,表示一个v4l2设备实例。
v4l2_subdev
struct v4l2_subdev {
#if defined(CONFIG_MEDIA_CONTROLLER);
struct media_entity entity;
#endif;
struct list_head list; //subdev列表
struct module *owner;
bool owner_v4l2_dev;
u32 flags;
struct v4l2_device *v4l2_dev; //依附的v4l2_device
const struct v4l2_subdev_ops *ops; //subdev操作函数
const struct v4l2_subdev_internal_ops *internal_ops;
struct v4l2_ctrl_handler *ctrl_handler; //控制句柄
char name[V4L2_SUBDEV_NAME_SIZE]; //subdev名称
u32 grp_id;
void *dev_priv;
void *host_priv;
struct video_device *devnode;
struct device *dev;
struct fwnode_handle *fwnode;
struct list_head async_list;
struct v4l2_async_subdev *asd;
struct v4l2_async_notifier *notifier;
struct v4l2_async_notifier *subdev_notifier;
struct v4l2_subdev_platform_data *pdata;//subdev平台数据
};
依附在一个v4l2_device下面,并表示一个v4l2设备的子设备,v4l2_device下可以有多个sub_device。
v4l2_fh
struct v4l2_fh {
struct list_head list; //文件句柄列表
struct video_device *vdev; //依附的video_device
struct v4l2_ctrl_handler *ctrl_handler;
enum v4l2_priority prio; //文件句柄的优先级
wait_queue_head_t wait;
struct mutex subscribe_lock;
struct list_head subscribed; //订阅的事件列表
struct list_head available; //可用的事件
unsigned int navailable; //可用的事件数
u32 sequence;
struct v4l2_m2m_ctx *m2m_ctx;
};
追踪的文件句柄用于
v4l2_device和v4l2_subdev的关系:
subdev 的设计目的是为了多路复用,就是控制使用一个v4l2_device可以挂接多个v4l2_subdev。这样的多路复用就是一个摄像头来多个摄像头。手机和后置摄像头。
在V4L2驱动中,使用v4l2_device来表示摄像头摄像头(ISP)。使用v4l2_subdev来表示具体的某个摄像头(Sensor)。
v4l2_file_operations
//V4L2设备操作函数
struct v4l2_file_operations {
struct module *owner;
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
__poll_t (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
#ifdef CONFIG_COMPAT;
long (*compat_ioctl32) (struct file *, unsigned int, unsigned long);
#endif;
unsigned long (*get_unmapped_area) (struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*open) (struct file *);
int (*release) (struct file *);
};
v4l2_ioctl_ops
//IOCTL操作函数
struct v4l2_ioctl_ops {
......
int (*vidioc_overlay)(struct file *file, void *fh, unsigned int i);
int (*vidioc_g_fbuf)(struct file *file, void *fh, struct v4l2_framebuffer *a);
int (*vidioc_s_fbuf)(struct file *file, void *fh, const struct v4l2_framebuffer *a);
int (*vidioc_streamon)(struct file *file, void *fh, enum v4l2_buf_type i);
int (*vidioc_streamoff)(struct file *file, void *fh, enum v4l2_buf_type i);
......
int (*vidioc_enum_framesizes)(struct file *file, void *fh, struct v4l2_frmsizeenum *fsize);
int (*vidioc_enum_frameintervals)(struct file *file, void *fh, struct v4l2_frmivalenum *fival);
int (*vidioc_s_dv_timings)(struct file *file, void *fh, struct v4l2_dv_timings *timings);
int (*vidioc_g_dv_timings)(struct file *file, void *fh, struct v4l2_dv_timings *timings);
int (*vidioc_query_dv_timings)(struct file *file, void *fh, struct v4l2_dv_timings *timings);
int (*vidioc_enum_dv_timings)(struct file *file, void *fh, struct v4l2_enum_dv_timings *timings);
int (*vidioc_dv_timings_cap)(struct file *file, void *fh, struct v4l2_dv_timings_cap *cap);
int (*vidioc_g_edid)(struct file *file, void *fh, struct v4l2_edid *edid);
int (*vidioc_s_edid)(struct file *file, void *fh, struct v4l2_edid *edid);
int (*vidioc_subscribe_event)(struct v4l2_fh *fh, const struct v4l2_event_subscription *sub);
int (*vidioc_unsubscribe_event)(struct v4l2_fh *fh, const struct v4l2_event_subscription *sub);
long (*vidioc_default)(struct file *file, void *fh, bool valid_prio, unsigned int cmd, void *arg);
};
v4l2_subdev_ops
//subdev操作函数
struct v4l2_subdev_ops {
const struct v4l2_subdev_core_ops *core; //subdev核心操作回调
const struct v4l2_subdev_tuner_ops *tuner; //radio模式打开v4l设备时的操作回调
const struct v4l2_subdev_audio_ops *audio; //音频相关设置回调
const struct v4l2_subdev_video_ops *video; //video模式打开v4l设备时的操作回调
const struct v4l2_subdev_vbi_ops *vbi; //通过vbi设备节点以video模式打开v4l设备时的操作回调
const struct v4l2_subdev_ir_ops *ir; //IR(红外)设备操作函数
const struct v4l2_subdev_sensor_ops *sensor; //sensor操作函数
const struct v4l2_subdev_pad_ops *pad; //pad操作函数
};
v4l22,所以多部分可以轻松地根据实际设备的需要实现的设备。
上面的_ioctl_ops中实现的部分ioctl最终到v4l2_dev_ops中的调用子函数。
API函数
//注册/注销video_device
int video_register_device(struct video_device *vdev, enum vfl_devnode_type type, int nr)
void video_unregister_device(struct video_device *vdev)
//分配/释放video_device
struct video_device * __must_check video_device_alloc(void);
void video_device_release(struct video_device *vdev)
//注册/注销v4l2_device
int v4l2_device_register(struct device *dev, struct v4l2_device *v4l2_dev)
void v4l2_device_unregister(struct v4l2_device *v4l2_dev)
//注册/注销v4l2_subdev(关联v4l2_device和v4l2_subdev)
int v4l2_device_register_subdev(struct v4l2_device *v4l2_dev, struct v4l2_subdev *sd)
void v4l2_device_unregister_subdev(struct v4l2_subdev *sd)
//初始化v4l2_subdev
void v4l2_subdev_init(struct v4l2_subdev *sd, const struct v4l2_subdev_ops *ops);
/********************************I2C subdev*************************************/
//初始化v4l2_subdev, 该subdev是I2C设备
void v4l2_i2c_subdev_init(struct v4l2_subdev *sd, struct i2c_client *client,
const struct v4l2_subdev_ops *ops)
/*******************************SPI subdev************************************************/
//初始化v4l2_subdev, 该subdev是SPI设备
void v4l2_spi_subdev_init(struct v4l2_subdev *sd, struct spi_device *spi,
const struct v4l2_subdev_ops *ops)
审核编辑:刘清
-
Linux
+关注
关注
88文章
11814浏览量
219527 -
摄像头
+关注
关注
61文章
5115浏览量
103482 -
LINUX内核
+关注
关注
1文章
321浏览量
23296
发布评论请先 登录
OpenHarmony相机用户态驱动框架
想要驾驭Linux驱动开发,必须深刻理解Linux总线设备驱动框架
Linux DMA Engine框架的介绍
如何使用Linux内核实现USB驱动程序框架
嵌入式Linux驱动开发从基础到框架

IAR 实现类linux驱动模块框架module_init(init_fun)
Linux内核中视频设备驱动框架V4L2X详解
Linux驱动分析之RTC框架

Linux Regmap 驱动框架



评论