 高光谱分辨率激光雷达测量低层大气温度-莱森光学
高光谱分辨率激光雷达测量低层大气温度-莱森光学

温度是重要的气象参数,早在1971年,某专家学者利用瑞利激光雷达成功地对大气温度进行了测量。然而,在30km以下的高度由于气溶胶的影响,利用瑞利激光雷达难以进行温度精确的测量。在过去的几10年激光雷达技术的发展过程中,有很多方法用来去除低空气溶胶散射的影响。专家利用干涉仪(FPI)尝试对大气散射中气溶胶散射信号和分子散射信号进行分离。2005年,有专家学者成功地利用FPI实现24h测量,在5km以下测量精度达到2K。1983年,又有专家学者提出将原子吸收滤波器用于高光谱分辨率激光雷达(HSRL)测量大气参量。他们在HSRL中使用了钡原子吸收滤波器测量了大气温度。与FPI相比,原子(分子)滤波器光路设计简单,不依赖于入射光的角度,光路调节简单,其吸收线在滤波器温度确定情况下比较稳定,用于低空测量时,在适当温度下对气溶胶信号有强烈的吸收,这样就可以提高分离气溶胶米散射和大气分子瑞利信号的精度。资料显示专家曾在532nm采用2个碘分子滤波器,在对流层大气温度测量中取得了较好的结果。据各项资料调查统筹显示基于碘分子滤波器的HSRL系统,可以有效地分离气溶胶散射和分子散射,从而利用瑞利散射测量对流层大气温度剖面。本文介绍了基于碘分子滤波器HSRL的系统结构,给出了利用该系统测量大气温度的原理和方法,并将测量结果与气象局探空数据进行了对比。
1基于碘分子滤波器HSRL及温度测量原理
1.1基于碘分子滤波器HSRL系统
采用的HSRL系统结构如图1所示,其主要由激光发射系统、信号接收系统和信号采集、处理及控制系统组成。高功率、窄线宽和频率稳定的532nm输出激光发射系统,其脉冲激光器为倍频的激光器,种子激光器为双波长、窄线宽及可调谐半导体泵浦非平面环形腔的固体激光器。利用碘分子吸收线将激光器的频率锁定在工作频率上。种子注入和频率锁定的激光通过扩束准直后经扫描镜发射到大气中,大气回波信号通过扫描镜和望远镜系统接收。接收到的回波信号分成两路,如图2(a)示,一路作为能量参考被直接探测,另一路则通过碘分子滤波器。激光频率锁定在吸收线谷底中心位置时,如图2(b)示,由于碘分子滤波器具有很高的抑制比,气溶胶散射几乎完全被滤除。表1给出了HSRL系统的主要参数。
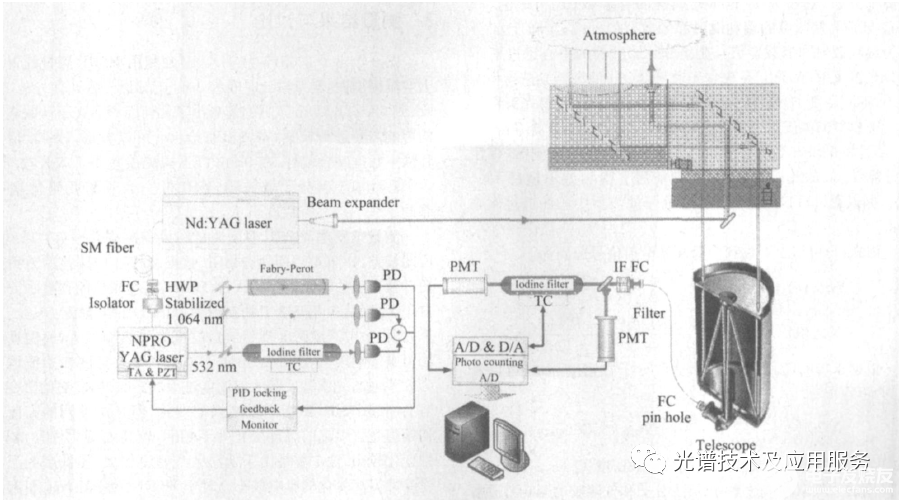
图1大气温度测量HSRL系统
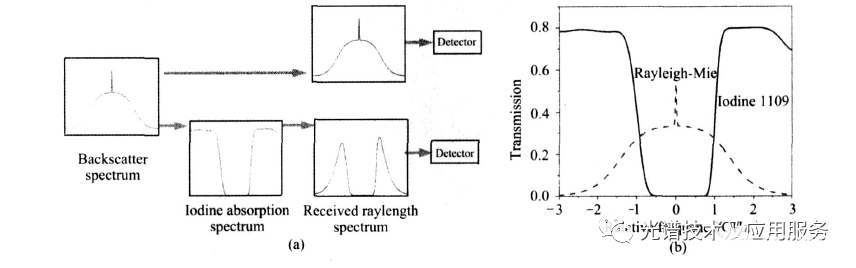
图2基于碘分子滤波器HSRL探测原理示意图
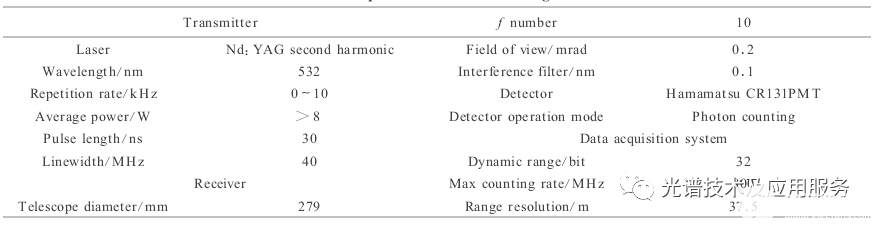
表1基于碘分子滤波器的HSRL主要性能指标
1.2温度测量原理
为便于分析,边里省略了部分系统固有参数。式中:NRay和NMie分别为接收到的瑞利散射和米散射信号;TRay和TMie分别为瑞利散射和米散射信号在碘分子滤波器的中心透过率;R为分光镜反射率。TRay是瑞利光谱与碘分子滤波器光谱卷积的结果,不同高度、温度、压强不同,瑞利光谱也不同,首先采用标准大气模型的温度、压强剖面以及瑞利S6模型来计算TRay剖线,然后将HSRL数据计算出的温度结果再次待入到S6模型中计算TRay,如此反复多次,直到前后2次相差不超过1%。TMie可以通过直接测量激光在碘分子滤波器中心的透过率来获得。
其中:T(zc)和N(zc)分别为参考高度上的大气温度和密度;R为气体普适数;g(z)为重力加速度。参考高度上的大气密度和温度可由探空资料或者大气模型给出。利用式(2)求得瑞利散射信号后,可以根据式(3)和式(4)求得大气温度。
3测量结果与讨论
图3为利用HSRL测量上空温度剖面,测量累计时间为5min,(a)激光雷达信号从1.3km到9km,1.3km以下的信号由于几何因子和光子计数饱和的影响需要进行校正,本文没有给出。可以看出,HSRL信号和探空数据吻合较好,在9km以下探测误差小于3K,如(b)示。证明基于碘分子滤波器HSRL低空大气温度测量是可靠的。测量中发现,HSRL温度测量结果和探空数据存在着约7K的偏差,如图4(a)所示,HSRL数据减掉这个偏差后就得到图3校正后的结果。
分析认为,HSRL温度测量的误差主要来自于2方面:参考高度上的初始值;HSRL的测量值NRay。计算表明,参考高度密度初始值对温度结果影响不大,而温度初始值则影响较大,图4(b)给出了参考高度上温度初始值偏差为5K对激光雷达反演大气温度结果的影响,温度初始值变化时会引起HSRL温度测量结果的变化,但是在不同的高度由初始值变化引起的温度变化并不相同,较高处变化较大,较低处变化较小,这主要是由于低层大气密度较大,使低层的温度受参考温度变化的影响较小。
对于HSRL测量值NRay引起的偏差,原因在于HSRL系统本身,包括其频率的漂移、激光光谱的纯度和背景光的影响等。观测过程中,激光器的频率被锁定在碘分子吸收线谷底处,以便分离出大气瑞利散射信号。激光器频率的自由漂移和由于激光种子注入不完整引起的激光光谱纯度变化都会引起HSRL测量值NRay变化,使HSRL计算得到的温度值偏大。另外,背景光以及光电倍增管暗电流也是个不可忽视的问题。虽然在信号处理时将其减去,但如果将背景光等估计偏大或偏小,都可能引起HSRL反演大气温度结果的偏差。
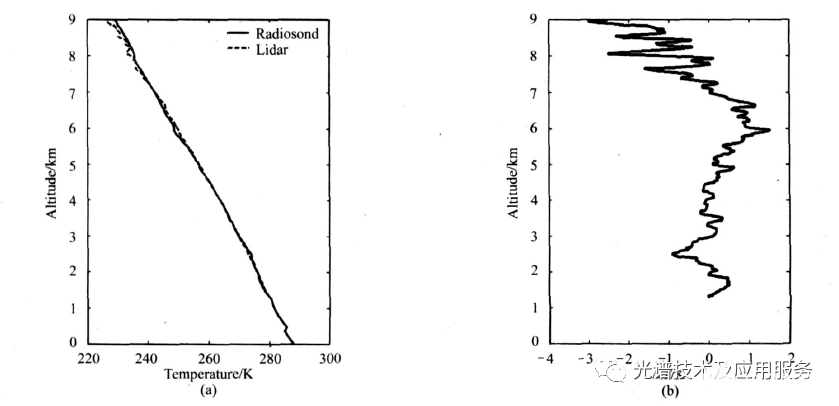
图3(a)HSRL反演温度与气象局探空数据测量对比结果;(b)HSRL温度与气球温度偏差
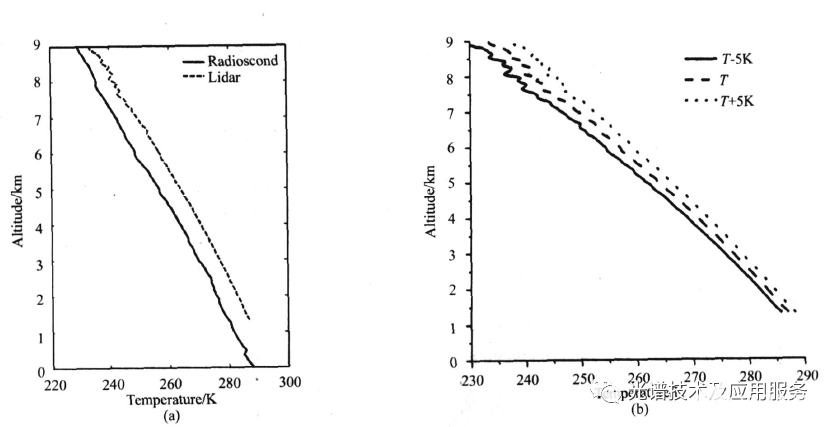
图4(a)HSRL数据整体偏差;(b)参考高度温度初始值选取引起的偏差
3结论
基于碘分子滤波器的HSRL系统去除了气溶胶信号的影响,从而可以利用瑞利散射信号强度测量低空大气温度。给出了利用该系统对流层大气温度测量结果,与当地气象局探空数据对比结果显示出较好的一致性,温度偏差在9km内小于3K,证明了系统对低层大气温度的探测能力。讨论了系统偏差和由于参考高度温度初始值选取引起的温度廓线的变化。利用瑞利散射强度测量温度精度主要受大气密度测量的影响,因此测量精度不是很高。进一步的研究中,系统将增加测量通道,系统具有2个碘分子滤波器,两者工作在不同的温度下,从而可以利用瑞利散射光谱线宽与温度的关系来更准确地测量大气温度。
莱森光学(深圳)有限公司是一家提供光机电一体化集成解决方案的高科技公司,我们专注于光谱传感和光电应用系统的研发、生产和销售。
审核编辑 黄昊宇
-
激光
+关注
关注
21文章
3726浏览量
69899
发布评论请先 登录
激光雷达在工业检测与测量场景的应用优势

为啥自动驾驶不使用1550纳米激光雷达?

高光谱相机的“鱼与熊掌”:空间分辨率与光谱分辨率,如何兼得?
固态激光雷达参数以及避障视频
从点云到图像级!华为新一代896线激光雷达来袭,分辨率提升4倍

车载激光雷达温度监控:NTC芯片的核心应用
【科研动态】新一代集成光子FMCW激光雷达光源的设计框架与性能权衡

拉曼光谱专题4 | 解锁拉曼分析密码:光谱分辨率的奥秘与应用

ADC分辨率与精度的区别是什么
相机分辨率:融合探测器与光学性能
纳芯微栅极驱动器NSD2017在激光雷达应用中PCB设计的注意点

光纤光谱仪的分辨率越高越好吗?科普来了
决定自动驾驶激光雷达感知质量的因素有哪些?




评论