 KUKA机器人利用WorkVisual拓扑结构诊断网络故障
KUKA机器人利用WorkVisual拓扑结构诊断网络故障

拓扑结构诊断
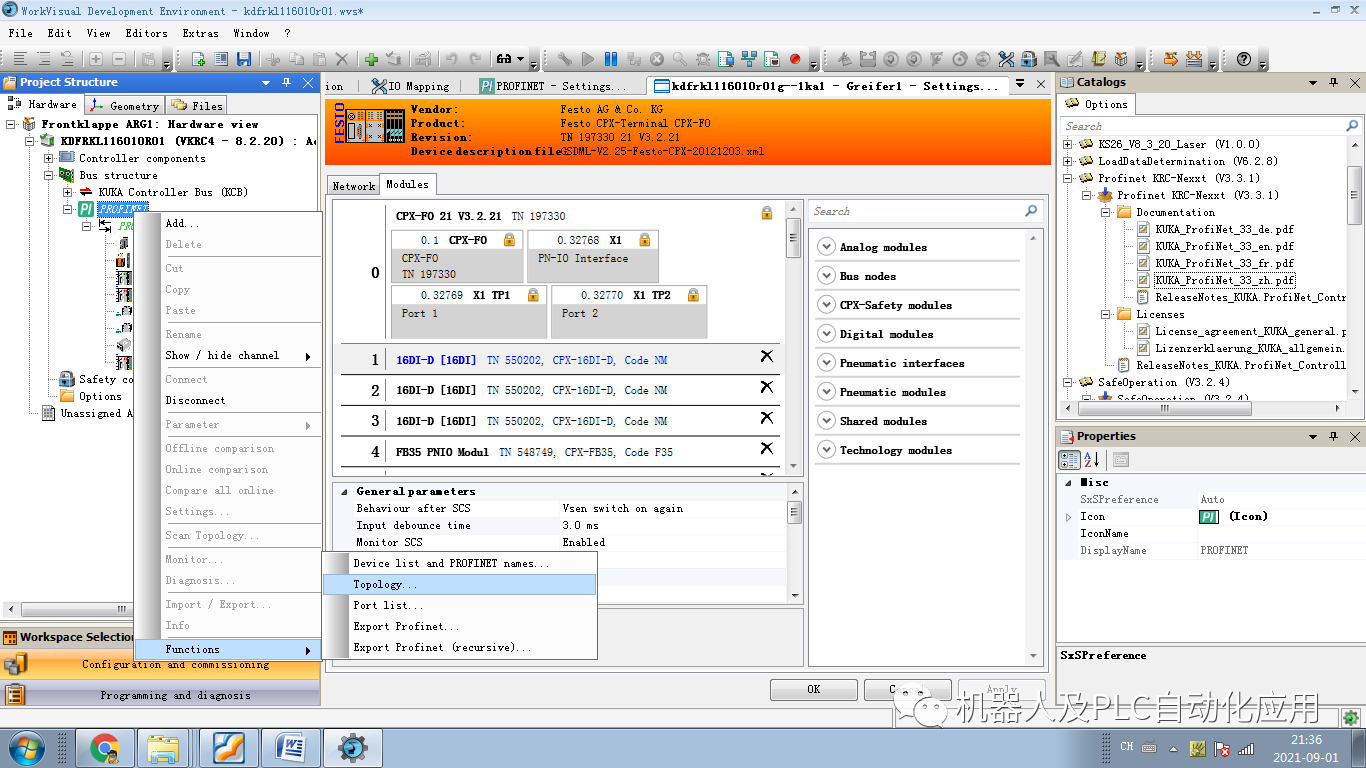
1. 在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2. 选中 PROFINET 节点。
3. 点击按钮 。选项卡 拓扑结构 显示。
。选项卡 拓扑结构 显示。
操作步骤
1. 在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2. 在树状结构中点击 PROFINET并在弹出菜单中选择连接。
3. 用右键点击 PROFINET 并在快捷菜单中选择 功能 > 拓扑 ...。选项卡拓扑即被显示。
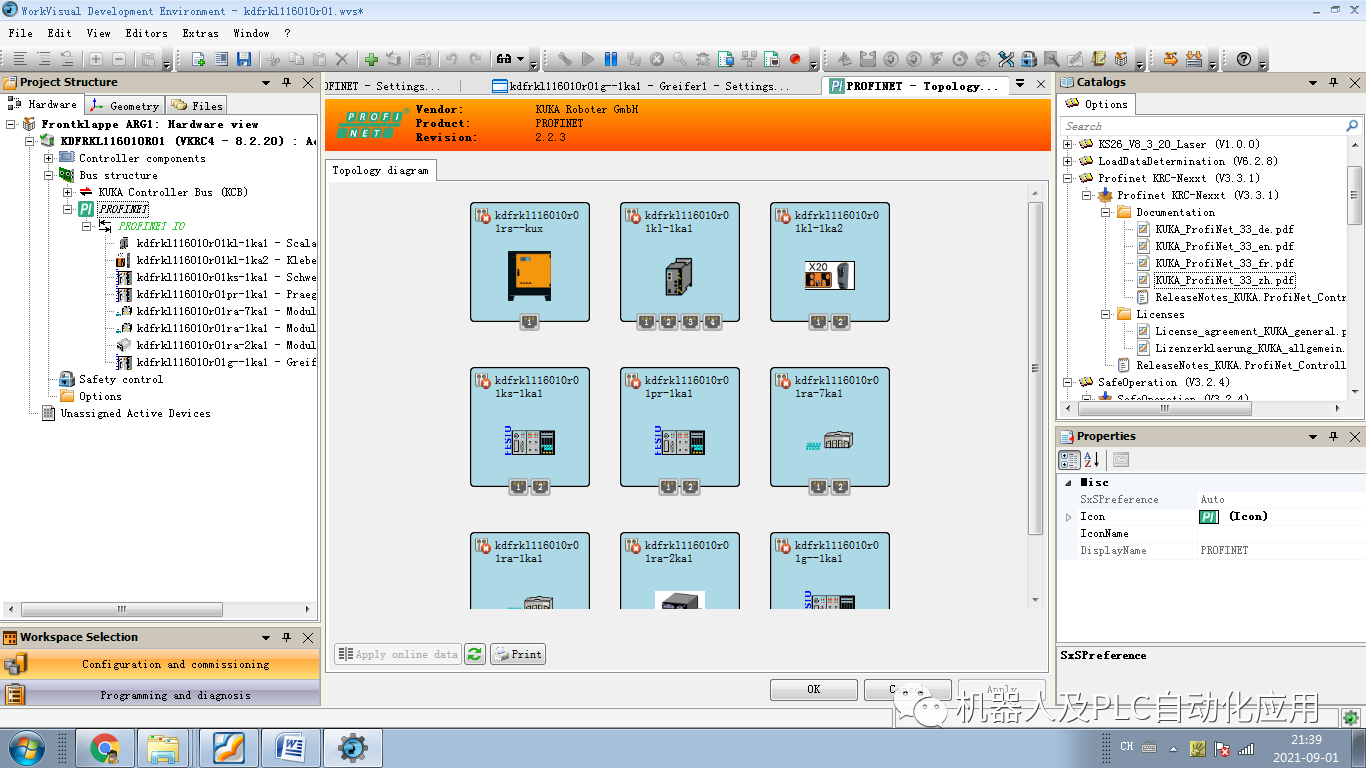
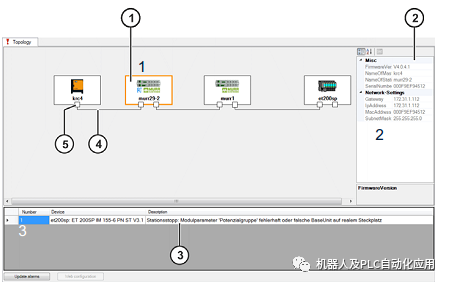
1. 工业以太网设备
如果设备显示为白色,则存在一个与此设备的连接。如果设备显示为灰色,则不存在与此设备的连接。
2. 参数窗口
为所选的设备显示不同的参数。
3. 信息窗口
如果设备报错,则显示该信息提示窗口。点击 更新警报 按钮可更新显示。
4.按钮网络配置可打开设备的网络界面。在此可执行设备诊断或更改设备配置。
5. 连接电缆.
6.接口-已连接的接口显示为白色,未连接的显示为灰色。
---我们通过拓扑的诊断功能可以更直观的发现问题,同时根据报警提示查找网络故障的问题点,缩短维修时间是比较快速有效的故障判断及处理的工具。
----------------END------------------
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6999浏览量
114568 -
拓扑
+关注
关注
4文章
353浏览量
30556 -
KUKA机器人
+关注
关注
4文章
144浏览量
10122
原文标题:KUKA机器人利用WorkVisual拓扑结构诊断网络故障
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节扭矩传感器的详细应用场景及解决方案
)。
方案2:磁弹性/压磁式扭矩传感器(高鲁棒性)
原理:利用铁磁材料的逆磁致伸缩效应,扭矩导致磁导率变化,通过非接触线圈检测。
适用场景:对防尘防水要求高的足式关节(如户外机器人)。
优点:非接触,无
发表于 05-20 17:40
荣耀机器人散热系统介绍
机器人生死的核心系统。一、散热系统在机器人中的核心定位在机器人的物理结构中,散热系统并非独立部件,而是一个集成式的热管理网络,它与动力层、能

基于米尔RK3576核心板的国产割草机器人解决方案
障决策 :利用NPU加速运行轻量化YOLO等国产优化模型,精准识别草坪中的障碍物。
全覆盖路径规划 :利用A72大核运行弓字形覆盖算法、边界回充算法,相比传统随机式机器人,作业效率可提升80%以上
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
,无需护栏
工业协作机器人利用关节扭矩传感器,可在碰撞时3毫秒内检测到力突变,并在10毫秒内停止运动,接触力可控制在50牛以下(安全标准为140牛)。这让机器人无需安全围栏就能与人并肩工作。3. 精细
发表于 04-17 17:27
Neway电机方案在机器人技术方面的优势
系统稳定性背景:工业机器人需长时间连续运行,电源故障可能导致机械臂失控、生产线停机等严重后果。Neway方案:具备过压、过流、短路三重保护功能,提供OCP(过流保护)、OTP(过温保护)信号输出,支持
发表于 03-30 09:39
伺服系统的常见故障和诊断方法
伺服系统作为现代工业自动化中的核心部件,广泛应用于数控机床、机器人、包装机械等领域。其高精度、快速响应的特性对设备性能至关重要,但复杂的结构也使得故障诊断成为维护难点。本文将系统分析伺服系统的常见
探索RISC-V在机器人领域的潜力
利用Gazebo仿真环境(在x86主机上运行)和MUSE Pi Pro上的ROS 2节点进行了联合仿真。
• 场景: 在PC的Gazebo中运行一个TurtleBot3机器人模型,MUSE Pi
发表于 12-03 14:40
人形机器人开发加速器:EC-Engineer Web + Jetson AGX Orin 的远程诊断新玩法
在全球工业与机器人领域,人形机器人的研发正迎来高速发展。这类机器人不仅依赖强大的AI算力,更要求底层控制系统具备高实时性与高可靠性。在此趋势下,NvidiaJetsonAGXOrin作为边缘AI计算

EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
的关键标尺。这其中,KUKA等品牌的高速轻量化机器人扮演着执行者的角色,而确保这些“精兵强将”在统一指挥下协同作战的神经中枢,正是EtherCAT转PROFINET协议转换网关。它不仅是连接异构网络的桥梁,更是提升整个生产线柔性
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
信而泰×DeepSeek:AI推理引擎驱动网络智能诊断迈向 “自愈”时代
定位到出口路由器端口存在大量物理层错误计数,更换光模块后,故障立即排除,业务完全恢复正常。此案例充分验证了AI推理引擎在复杂网络故障诊断中精准定位根因、大幅提升排障效率的核心价值。
发表于 07-16 15:29
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动
发表于 06-11 14:30
明远智睿SSD2351开发板:语音机器人领域的变革力量
通过网络连接云端服务器进行快速检索和分析,然后利用语音合成技术将答案以自然流畅的语音反馈给用户。同时,借助开发板的网络连接功能,语音机器人还可以与后台管理系统进行数据交互,实时更新知识
发表于 05-28 11:36



评论