 NVIDIA驱动程序支持OpenCL和Vulkan进行互操作
NVIDIA驱动程序支持OpenCL和Vulkan进行互操作

OpenCL 正在改进与其他 API (如 Vulkan )的互操作方式。本文向您介绍了最新的 OpenCL 互操作风格,最新的NVIDIA驱动程序已经支持这种风格。我们提供了可下载的示例代码,所以您今天可以尝试这个新功能。
需要一种新的互操作方式
开发人员通常将 OpenCL for compute 与其他 API (如 OpenGL )一起使用,以访问包括图形渲染在内的功能。 OpenCL 长期以来一直支持通过扩展与 OpenGL 、 OpenGL ES 、 EGL 、 Direct3D 10 和 Direct3D 11 共享隐式缓冲区和图像对象:
cl_khr_gl_sharing
cl_khr_gl_event
cl_khr_egl_image
cl_khr_egl_event
cl_khr_d3d10_sharing
cl_khr_d3d11_sharing
新一代 GPU API (如 Vulkan )使用对外部内存的显式引用以及信号量来协调对共享资源的访问。到目前为止,还没有 OpenCL 扩展来支持外部内存和信号量与这类新的 API 共享。
OpenCL 和 Vulkan 之间的互操作在移动和桌面平台上都有很强的需求。 NVIDIA 与 Khronos OpenCL 工作组密切合作,发布了一套临时跨供应商的 KHR 扩展。这些扩展使应用程序能够在 OpenCL 和 Vulkan 等 API 之间高效地共享数据,与使用隐式资源的前一代互操作 API 相比,灵活性显著提高。
这组新的外部内存和信号量共享扩展提供了一个通用框架,使 OpenCL 能够使用 Vulkan 开发人员熟悉的方法导入外部 API 导出的外部内存和信号量句柄。然后, OpenCL 使用这些信号量来同步外部运行时,协调共享内存的使用。
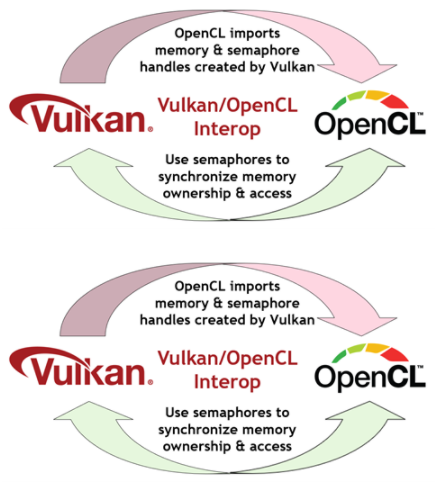
图 1 。 OpenCL 与 Vulkan 软件的互操作关系
然后可以添加特定于 API 的外部互操作扩展,以处理与特定 API 交互的细节。 Vulkan 互操作现在可用,并计划使用其他 API ,如 DirectX 12 。
OpenCL 新的外部信号量和内存共享功能包括单独的一组精心构造的扩展。
信号量扩展
这组扩展增加了从操作系统特定的信号量句柄创建 OpenCL 信号量对象的能力。
cl_khr_semaphore – 表示带有等待和信号的信号量。这是一个新的 OpenCL 对象类。
cl_khr_external_semaphore – 使用导入和导出外部信号量的机制扩展cl_khr_semaphore,类似于 VK_KHR_external_semaphore 。
以下扩展使用特定于句柄类型的行为扩展cl_khr_external_semaphore:
cl_khr_external_semaphore_opaque_fd – 使用带有引用传输的 Linux fd 句柄共享外部信号量,类似于 VK_KHR_external_semaphore_fd 。
cl_khr_external_semaphore_win32 – 与 VK_KHR_external_semaphore_win32 类似,使用 win32 NT 和 KMT 句柄与引用转移共享外部信号量。
内存扩展
这些扩展增加了从操作系统特定的内存句柄创建 OpenCL 内存对象的能力。它们的设计与 Vulkan 外部存储器扩展 VK_KHR_external_memory 。 类似
cl_khr_external_memory – 从其他 API 导入外部内存。
以下扩展使用特定于句柄类型的行为扩展cl_khr_external_memory:
cl_khr_external_memory_opaque_fd – 使用 Linux fd 句柄共享外部内存,类似于 VK_KHR_external_memory_fd 。
cl_khr_external_memory_win32 – 使用 win32 NT 和 KMT 句柄共享外部内存,类似于 VK_KHR_external_memory_win32 。
使用 OpenCL
典型的互操作用例包括以下步骤。
检查所需的支持是否可用:
检查底层 OpenCL 平台和带有clGetPlatformInfo和clGetDeviceInfo的设备是否支持所需的扩展cl_khr_external_semaphore和cl_khr_external_memory。
为了能够使用 Win32 信号量和内存句柄,请检查cl_khr_external_semaphore_win32_khr和cl_khr_external_memory_win32_khr扩展是否存在。
为了能够使用 FD 信号量和内存句柄,请检查cl_khr_external_semaphore_opaque_fd_khr和cl_khr_external_memory_opaque_fd_khr扩展是否存在。这也可以通过查询支持的句柄类型来检查。
导入外部信号量需要cl_khr_external_semaphore。如果支持cl_khr_external_semaphore_opaque_fd,则可以使用clCreateSemaphoreWithPropertiesKHR和 OpenCL 中的 FD 句柄导入 Vulkan 导出的外部信号量。
// Get cl_devices of the platform. clGetDeviceIDs(..., &devices, &deviceCount);// Create cl_context with just first device clCreateContext(..., 1, devices, ...);// Obtain fd/win32 or similar handle for external semaphore to be imported from the other API. int fd = getFdForExternalSemaphore();// Create clSema of type cl_semaphore_khr usable on the only available device assuming the semaphore was imported from the same device.cl_semaphore_properties_khr sema_props[] = {(cl_semaphore_properties_khr)CL_SEMAPHORE_TYPE_KHR, (cl_semaphore_properties_khr)CL_SEMAPHORE_TYPE_BINARY_KHR, (cl_semaphore_properties_khr)CL_SEMAPHORE_HANDLE_OPAQUE_FD_KHR, (cl_semaphore_properties_khr)fd, 0}; int errcode_ret = 0; cl_semaphore_khr clSema = clCreateSemaphoreWithPropertiesKHR(context, sema_props, &errcode_ret);
导入图像需要cl_khr_external_memory和对图像的支持。在 OpenCL 中,通过clCreateSemaphoreWithPropertiesKHR使用 Win32 句柄导入 Vulkan 导出的外部信号量。
// Get cl_devices of the platform. clGetDeviceIDs(..., &devices, &deviceCount);// Create cl_context with just first device clCreateContext(..., 1, devices, ...);// Obtain fd/win32 or similar handle for external semaphore to be imported from the other API. void *handle = getWin32HandleForExternalSemaphore();// Create clSema of type cl_semaphore_khr usable on the only available device assuming the semaphore was imported from the same device. cl_semaphore_properties_khr sema_props[] = {(cl_semaphore_properties_khr)CL_SEMAPHORE_TYPE_KHR, (cl_semaphore_properties_khr)CL_SEMAPHORE_TYPE_BINARY_KHR, (cl_semaphore_properties_khr)CL_SEMAPHORE_HANDLE_OPAQUE_WIN32_KHR, (cl_semaphore_properties_khr)handle, 0}; int errcode_ret = 0; cl_semaphore_khr clSema = clCreateSemaphoreWithPropertiesKHR(context, sema_props, &errcode_ret);
在 OpenCL 中,使用 FD 句柄将 Vulkan 导出的外部内存作为缓冲内存与clCreateBufferWithProperties一起导入。
// Get cl_devices of the platform.
clGetDeviceIDs(..., &devices, &deviceCount);
// Create cl_context with just first device
clCreateContext(..., 1, devices, ...);
// Obtain fd/win32 or similar handle for external memory to be imported from other API.
int fd = getFdForExternalMemory();
// Create extMemBuffer of type cl_mem from fd.
cl_mem_properties_khr extMemProperties[] =
{ (cl_mem_properties_khr)CL_EXTERNAL_MEMORY_HANDLE_OPAQUE_FD_KHR,
(cl_mem_properties_khr)fd,
0
};
cl_mem extMemBuffer = clCreateBufferWithProperties(/*context*/ clContext,
/*properties*/ extMemProperties,
/*flags*/ 0,
/*size*/ size,
/*host_ptr*/ NULL,
/*errcode_ret*/ &errcode_ret);
在 OpenCL 中,使用clCreateImageWithProperties将 Vulkan 导出的外部内存作为图像内存导入。
// Create img of type cl_mem. Obtain fd/win32 or similar handle for external memory to be imported from other API. int fd = getFdForExternalMemory();// Set cl_image_format based on external image info cl_image_format clImgFormat = { }; clImageFormat.image_channel_order = CL_RGBA; clImageFormat.image_channel_data_type = CL_UNORM_INT8;// Set cl_image_desc based on external image info size_t clImageFormatSize; cl_image_desc image_desc = { }; image_desc.image_type = CL_MEM_OBJECT_IMAGE2D_ARRAY; image_desc.image_width = width; image_desc.image_height = height; image_desc.image_depth = depth; cl_mem_properties_khr extMemProperties[] = { (cl_mem_properties_khr)CL_EXTERNAL_MEMORY_HANDLE_OPAQUE_FD_KHR, (cl_mem_properties_khr)fd, 0 };cl_mem img = clCreateImageWithProperties(/*context*/ clContext, /*properties*/ extMemProperties, /*flags*/ 0, /*image_format*/ &clImgFormat, /*image_desc*/ &image_desc, /*errcode_ret*/ &errcode_ret)
使用信号量 wait 和 signal 在 OpenCL 和 Vulkan 之间同步。
// Create clSema using one of the above examples of external semaphore creation. int errcode_ret = 0; cl_semaphore_khr clSema = clCreateSemaphoreWithPropertiesKHR(context, sema_props, &errcode_ret); while (true) { // (not shown) Signal the semaphore from the other API,// Wait for the semaphore in OpenCL clEnqueueWaitSemaphoresKHR( /*command_queue*/ command_queue, /*num_sema_objects*/ 1, /*sema_objects*/ &clSema, /*num_events_in_wait_list*/ 0, /*event_wait_list*/ NULL, /*event*/ NULL); clEnqueueNDRangeKernel(command_queue, ...); clEnqueueSignalSemaphoresKHR(/*command_queue*/ command_queue, /*num_sema_objects*/ 1, /*sema_objects*/ &clSema, /*num_events_in_wait_list*/ 0, /*event_wait_list*/ NULL, /*event*/ NULL); // (not shown) Launch work in the other API that waits on 'clSema'
关于作者
Nikhil Joshi 目前在NVIDIA 管理 OpenCL 驱动程序团队。他还代表 NVIDIA 参加 Khronos OpenCL 工作组。他在 NVIDIA 的计算团队工作了 10 多年,致力于不同的计算 API ,包括 CUDA 、 Renderscript 和 OpenCL
Rekha Mukund 是 NVIDIA 计算组的产品经理,负责为汽车、 Jetson 和 Android 平台开发 CUDA Tegra 产品。她还负责管理 NVIDIA SimNet 产品和 OpenCL 计划。在加入 NVIDIA 之前, Rekha 在付费电视技术领域与思科合作了八年多。她是英国大学计算机科学学院的金牌获得者,他是印度国家级乒乓球运动员和狂热的旅行者。
审核编辑:郭婷
-
存储器
+关注
关注
39文章
7715浏览量
170856 -
NVIDIA
+关注
关注
14文章
5496浏览量
109095 -
操作系统
+关注
关注
37文章
7329浏览量
128639
发布评论请先 登录
NVIDIA-SMI因为无法与NVIDIA驱动程序通信而失败
VM Win7 Xenserver 7 Nvidia Grid 369.71驱动程序不应用
nvidia不再提供网格驱动程序
NVIDIA OpenGL驱动程序问题,错误代码9 - NVIDIA GRID K2
GPU如何在imx8m plus上工作以及GPU驱动程序如何集成到DRM驱动程序框架中?
基于eCos操作系统的FLASH驱动程序分析与移植
Linux驱动程序缺陷检测研究

Linux设备驱动程序的平台驱动程序和字符驱动程序介绍
NVIDIA发布Geforce 460.89:支持Vulkan光追
Vulkan 1.3帮助实现跨平台功能
使用Vulkan SC进行安全关键图形和实时GPU处理
了解和使用无操作系统和平台驱动程序
摩尔线程正式发布Linux驱动程序
Linux设备驱动程序分类有哪些
Imagination GPU 全面支持 Vulkan 1.4 和 Android 16






 工商网监
工商网监
评论